Изобретение относится к устройствам управления движением транспортного средства с раздельными электроприводами колес левого и правого бортов и может быть использовано для многодвигательных электроприводов рабочих машин с регулируемым соотношением частот вращения электродвигателей.
Известно устройство для управления тяговым электроприводом автономного транспортного средства, содержащее за- датчик мощности, датчик угла поворота колес, датчики частоты вращения тяговых электродвигателей, сумматоры, блок выделения знака, коммутатор, блоки перемножения, функциональные преобразователи, формирователи частоты скольжения.
Недостатками известного устройства являются ограниченные возможности его использования транспортными средствами, содержащими многодвигательный частотно-управляемый тяговый асинхронный электропривод с индивидуальными преобразователями частоты и общим источником питания, отсутствие учета явлений пробуксовки и стопорения колес транспортного средства, вызывающих снижение точности работы устройства,
Известно другое устройство для управления движением транспортного средства с раздельными электроприводами колес правого и левого бортов, содержащее задатчик скорости и радиуса поворота, сумматоры, перемножители, источник опорного напряжения и развязывающие элементы.
Недостатком указанного устройства является ограничение возможности его использования транспортными Средствами, содержащими тяговые электроприводы с жесткими механическими и линейными регулировочными характеристиками, осуществление поворотов воздействием только на скорости электроприводов, зависимость общей скорости от радиуса поворота из-за того, что воздействие осуществляется только на уменьшение частоты вращения внутреннего колеса, отсутствие учета явлений пробуксовки и стопорения колес транспортного средства, вызывающих снижение маневренности и эксплуатационных показателей (надежности работы, износа шин и т.д.) транспортного средства.
Наиболее близким к предлагаемому является устройство для управления тяговыми приводами, в частности рельсового транспортного средства, содержащее регуляторы частоты вращения тяговых двигателей, подключенные к тяговым двигателям соответствующих бортов транспортного средства, одними входами - к датчикам частоты вращения тяговых двигателей, а другими входами - к выходам соответственно первого и второго сумматоров, задатчиком частоты вращения, задатчиком радиуса поворота и
третьим сумматором.
Недостатками известного устройства являются ограниченность сферы применения, отсутствие учета явлений пробуксовки и стопорения колес, причем, если на прямо0 линейном участке пути произойдет незначи- тельная пробуксовка колес одного из бортов, например левого, то это будет сопровождаться снижением нагрузки и повышением частоты вращения электропривода
5 левого борта при соответствующем увеличении нагрузки электропривода правого борта, что будет воспринято устройством, как движение по кривой большого радиуса направо, в результате чего в описываемой си0 туации будет выработан неправильный управляющий сигнал, а именно - на увеличение скорости левого и снижение скорости правого электроприводов, что в данной ситуации может привести к окончательной по5 тере сцепления колес левого борта.
В целом возможность выработки неправильного управляющего сигнала в некоторых нестандартных ситуациях приведет к снижению управляемости и эксплуатацион0 ных показателей, в частности надежности работы транспортного средства.
Целью изобретения является повышение маневренности и управляемости транспортного средства.
5 Указанная цель достигается тем, что устройство, содержащее регуляторы частоты вращения тяговых двигателей, подключенные выходами к тяговым двигателям соответствующих бортов транспортного
0 средства, одними входами - к датчикам частоты вращения тяговых двигателей, а другими входами - к выходам соответственно первого и второго сумматоров, задатчик частоты вращения, задатчик радиуса поворота
5 и третий сумматор, снабжено нелинейным элементом, элементом дифференцирования, элементом умножения, инверторами и задатчиком интенсивности, выполненном на релейном элементе и интеграторе, при
0 этом вход релейного элемента подключен к выходу задатчика частоты вращения, а выход - к входу интегратора, соединенного выходом с другим входом релейного эле; мента, с первыми входами первого и второ5 го сумматоров и одним из входов элемента умножения, второй вход которого подключен к выходу задатчика радиуса поворота, а выход - к второму входу первого сумматора непосредственно, к второму входу второго сумматора - через первый инвертор и к пер
вому входу третьего сумматора через элемент дифференцирования.выходыпервого и второго сумматоров подключены к вторым входам регуляторов частоты вращения соответственно, выход одного из которых соединен с вторым входом третьего сумматора через второй инвертор, а выход другого - с третьим входом третьего сумматора непосредственно, вход которого соединен с выходом нелинейного элемента, подключенного выходом непосредственно к третьему входу одного и через инвертор - к третьему входу другого регулятора частоты вращения.
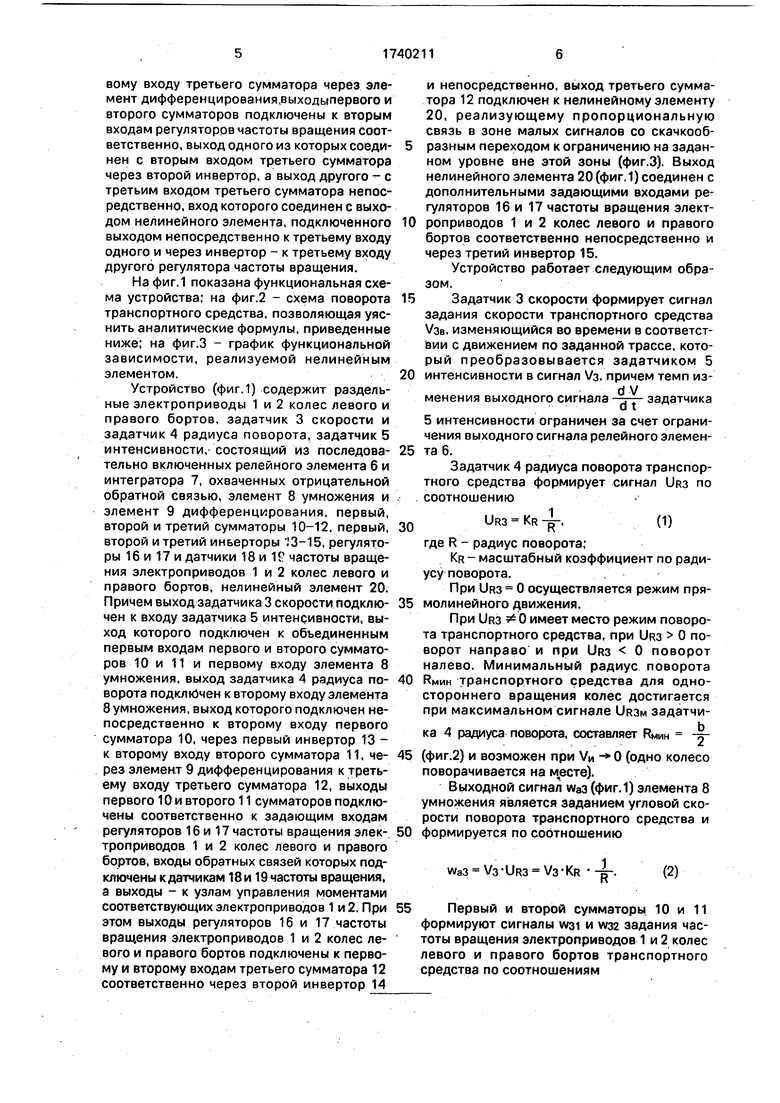
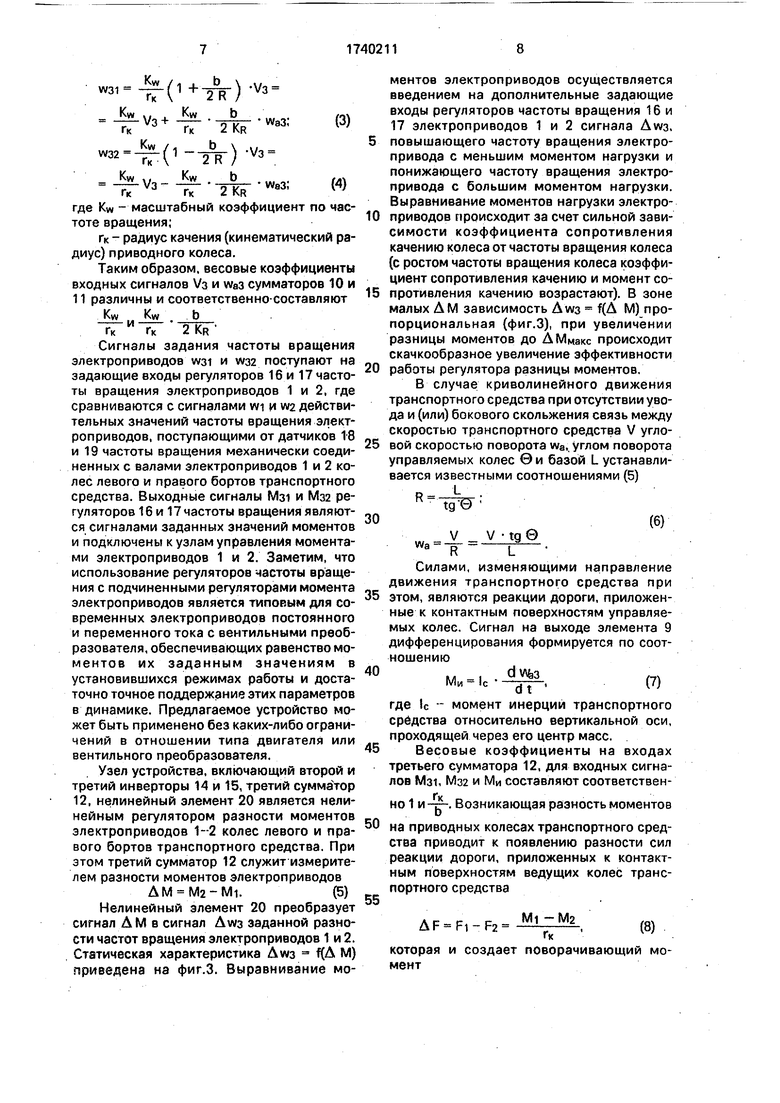
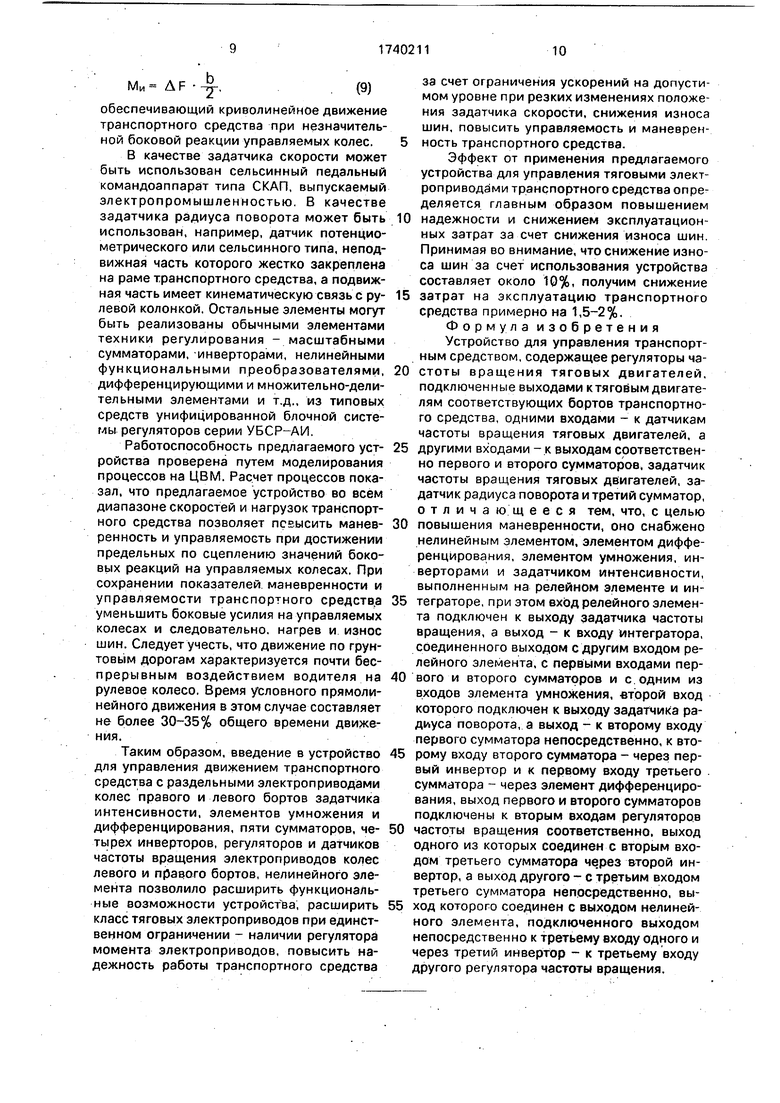
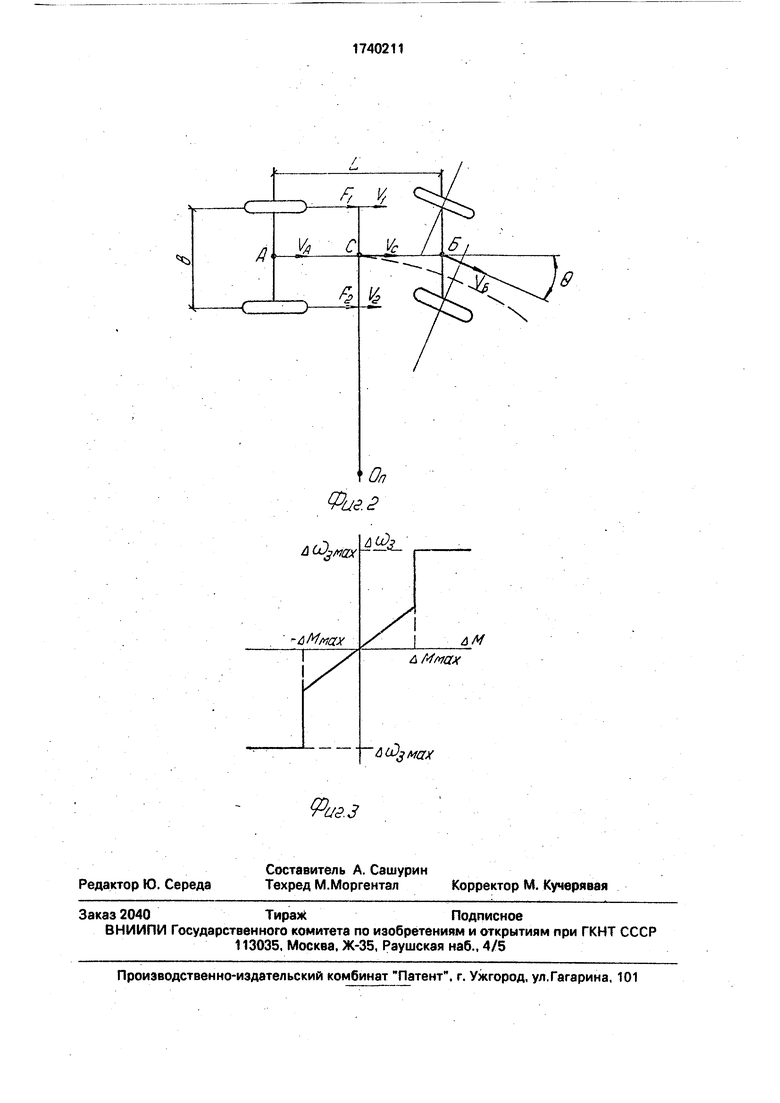
На фиг.1 показана функциональная схема устройства; на фиг.2 - схема поворота транспортного средства, позволяющая уяснить аналитические формулы, приведенные ниже; на фиг.З - график функциональной зависимости, реализуемой нелинейным элементом.
Устройство (фиг.1) содержит раздельные электроприводы 1 и 2 колес левого и правого бортов, задатчик 3 скорости и задатчик 4 радиуса поворота, задатчик 5 интенсивности, состоящий из последовательно включенных релейного элемента 6 и интегратора 7, охваченных отрицательной обратной связью, элемент 8 умножения и элемент 9 дифференцирования, первый, второй и третий сумматоры 10-12, первый, второй и третий инверторы 43-15, регуляторы 16 и 17 и датчики 18 и 1Г частоты вращения электроприводов 1 и 2 колес левого и правого бортов, нелинейный элемент 20. Причем выход задатчика 3 скорости подключен к входу задатчика 5 интенсивности, выход которого подключен к объединенным первым входам первого и второго сумматоров 10 и 11 и первому входу элемента 8 умножения, выход задатчика 4 радиуса поворота подключен к второму входу элемента 8 умножения, выход которого подключен непосредственно к второму входу первого сумматора 10, через первый инвертор 13 - к второму входу второго сумматора 11, через элемент 9 дифференцирования к третьему входу третьего сумматора 12, выходы первого 10 и второго 11 сумматоров подключены соответственно к задающим входам регуляторов 16 и 17 частоты вращения электроприводов 1 и 2 колес левого и правого бортов, входы обратных связей которых подключены к датчикам 18 и 19 частоты вращения, а выходы - к узлам управления моментами соответствующих электроприводов 1 и 2. При этом выходы регуляторов 16 и 17 частоты вращения электроприводов 1 и 2 колес левого и правого бортов подключены к первому и второму входам третьего сумматора 12 соответственно через второй инвертор 14
0
5
0
5
и непосредственно, выход третьего сумматора 12 подключен к нелинейному элементу 20, реализующему пропорциональную связь в зоне малых сигналов со скачкообразным переходом к ограничению на заданном уровне вне этой зоны (фиг.З). Выход нелинейного элемента 20 (фиг, 1) соединен с дополнительными задающими входами регуляторов 16 и 17 частоты вращения электроприводов 1 и 2 колес левого и правого бортов соответственно непосредственно и через третий инвертор 15.
Устройство работает следующим образом.
Задатчик 3 скорости формирует сигнал задания скорости транспортного средства Узв, изменяющийся во времени в соответствии с движением по заданной трассе, который преобразовывается задатчиком 5 интенсивности в сигнал Vs. причем темп изd V менения выходного сигнала . задатчика
5 интенсивности ограничен за счет ограничения выходного сигнала релейного элемента 6.
Задатчик 4 радиуса поворота транспортного средства формирует сигнал URS по соотношению
30
UR3
KR-1,
(1)
где R - радиус поворота;
KR - масштабный коэффициент по радиусу поворота.
При инз 0 осуществляется режим прямолинейного движения.
При UR3 0 имеет место режим поворота транспортного средства, при URS 0 поворот направо и при UR3 0 поворот налево. Минимальный радиус поворота Рмин транспортного средства для одностороннего вращения колес достигается при максимальном сигнале Крзм задатчиbка 4 радиуса поворота, составляет РМин -к(фиг.2) и возможен при VH - 0 (одно колесо поворачивается на месте).
Выходной сигнал waa (фиг.1) элемента 8 умножения является заданием угловой скорости поворота транспортного средства и
формируется по соотношению
Wa3 V3 UR3:
V3-KR --i-.
(2)
Первый и второй сумматоры 10 и 11 формируют сигналы wsi и W32 задания частоты вращения электроприводов 1 и 2 колес левого и правого бортов транспортного средства по соотношениям
W31
Kw /
Гк V3 +
W32( Гк
- Kw-v31 +
2R
) V3
KW ч . KW
Гк
Wa3,
Гк 2KR
ь ...
2 R / V3 KW . b
w83;
(3)
(4)
rK гк 2KR где KW - масштабный коэффициент по частоте вращения;
Гк - радиус качения (кинематический радиус) приводного колеса.
Таким образом, весовые коэффициенты входных сигналов Vs и was сумматоров 10 и 11 различны и соответственно-составляют
KwKwЬ
7Г И ПГ 2 KR
Сигналы задания частоты вращения электроприводов W31 и W32 поступают на задающие входы регуляторов 16 и 17 частоты вращения электроприводов 1 и 2, где сравниваются с сигналами wi и W2 действительных значений частоты вращения электроприводов, поступающими от датчиков 18 и 19 частоты вращения механически соединенных с валами электроприводов 1 и 2 колес левого и правого бортов транспортного средства. Выходные сигналы Мз1 и Мз2 регуляторов 16 и 17 частоты вращения являются сигналами заданных значений моментов и подключены к узлам управления моментами электроприводов 1 и 2. Заметим, что использование регуляторов частоты вращения с подчиненными регуляторами момента электроприводов является типовым для современных электроприводов постоянного и переменного тока с вентильными преобразователя, обеспечивающих равенство моментов их заданным значениям в установившихся режимах работы и достаточно точное поддержание этих параметров в динамике. Предлагаемое устройство может быть применено без каких-либо ограничений в отношении типа двигателя или вентильного преобразователя.
Узел устройства, включающий второй и третий инверторы 14 и 15, третий сумматор 12, нелинейный элемент 20 является нелинейным регулятором разности моментов электроприводов 1-2 колес левого и правого бортов транспортного средства. При этом третий сумматор 12 служит измерителем разности моментов электроприводов AM M2-Mi.(5)
Нелинейный элемент 20 преобразует сигнал AM в сигнал Aw/з заданной разности частот вращения электроприводов 1 и 2. Статическая характеристика Aws f(A WI) приведена на фиг.З. Выравнивание мо0
5
0
5
0
5
0
ментов электроприводов осуществляется введением на дополнительные задающие входы регуляторов частоты вращения 16 и 17 электроприводов 1 и 2 сигнала Awa, повышающего частоту вращения электропривода с меньшим моментом нагрузки и понижающего частоту вращения электропривода с большим моментом нагрузки. Выравнивание моментов нагрузки электроприводов происходит за счет сильной зависимости коэффициента сопротивления качению колеса от частоты вращения колеса (с ростом частоты вращения колеса коэффициент сопротивления качению и момент сопротивления качению возрастают). В зоне малых AM зависимость АУУЗ f(A M) пропорциональная (фиг.З), при увеличении разницы моментов до ДМмакс происходит скачкообразное увеличение эффективности работы регулятора разницы моментов,
В случае криволинейного движения транспортного средства при отсутствии увода и (или) бокового скольжения связь между скоростью транспортного средства V угловой скоростью поворота wa, углом поворота управляемых колес Э и базой L устанавливается известными соотношениями (5)
L . tg ©
(6)
V V tg в : RL
Силами, изменяющими направление движения транспортного средства при этом, являются реакции дороги, приложенные к контактным поверхностям управляемых колес. Сигнал на выходе элемента 9 дифференцирования формируется по соотношению
d
R
Wa
Ми Ic
dt
(7)
где с момент инерции транспортного средства относительно вертикальной оси, проходящей через его центр масс.
Весовые коэффициенты на входах третьего сумматора 12, для входных сигналов Mai, Мз2 и Ми составляют соответственГк
но 1 и-г-. Возникающая разность моментов
на приводных колесах транспортного средства приводит к появлению разности сил реакции дороги, приложенных к контактным поверхностям ведущих колес транспортного средства
AF FI - FZ Ml - М2
Гк
(8)
которая мент
и создает поворачивающий моМи - A F 4р(9)
обеспечивающий криволинейное движение транспортного средства при незначительной боковой реакции управляемых колес.
В качестве задатчика скорости может быть использован сельсинный педальный командоаппарат типа СКАП, выпускаемый электропромышленностью, В качестве задатчика радиуса поворота может быть использован, например, датчик потенцио- метрического или сельсинного типа, неподвижная часть которого жестко закреплена на раме транспортного средства, а подвижная часть имеет кинематическую связь с рулевой колонкой. Остальные элементы могут быть реализованы обычными элементами техники регулирования - масштабными сумматорами, инверторами, нелинейными функциональными преобразователями, дифференцирующими и множительно-дели- тельными элементами и т.д., из типовых средств унифицированной блочной системы регуляторов серии УБСР-АИ.
Работоспособность предлагаемого устройства проверена путем моделирования процессов на ЦВМ. Расчет процессов показал, что предлагаемое устройство во всем диапазоне скоростей и нагрузок транспортного средства позволяет повысить маневренность и управляемость при достижении предельных по сцеплению значений боковых реакций на управляемых колесах. При сохранении показателей маневренности и управляемости транспортного средства уменьшить боковые усилия на управляемых колесах и следовательно, нагрев и износ шин. Следует учесть, что движение по грунтовым дорогам характеризуется почти беспрерывным воздействием водителя на рулевое колесо. Время условного прямолинейного движения в этом случае составляет не более 30-35% общего времени движения.
Таким образом, введение в устройство для управления движением транспортного средства с раздельными электроприводами колес правого и левого бортов задатчика интенсивности, элементов умножения и дифференцирования, пяти сумматоров, четырех инверторов, регуляторов и датчиков частоты вращения электроприводов колес левого и правого бортов, нелинейного элемента позволило расширить функциональные возможности устройства, расширить класс тяговых электроприводов при единственном ограничении - наличии регулятора момента электроприводов, повысить надежность работы транспортного средства
за счет ограничения ускорений на допустимом уровне при резких изменениях положения задатчика скорости, снижения износа шин, повысить управляемость и маневрен- 5 ность транспортного средства.
Эффект от применения предлагаемого устройства для управления тяговыми электроприводами транспортного средства определяется главным образом повышением
0 надежности и снижением эксплуатационных затрат за счет снижения износа шин. Принимая во внимание, что снижение износа шин за счет использования устройства составляет около 10%, получим снижение
5 затрат на эксплуатацию транспортного средства примерно на 1,5-2%.
Формула изобретения Устройство для управления транспортным средством, содержащее регуляторы ча0 стоты вращения тяговых двигателей, подключенные выходами к тяговым двигателям соответствующих бортов транспортного средства, одними входами - к датчикам частоты вращения тяговых двигателей, а
5 другими входами - к выходам соответственно первого и второго сумматоров, задатчик частоты вращения тяговых двигателей, задатчик радиуса поворота и третий сумматор, отличающееся тем, что, с целью
0 повышения маневренности, оно снабжено нелинейным элементом, элементом дифференцирования, элементом умножения, инверторами и задатчиком интенсивности, выполненным на релейном элементе и ин5 теграторе, при этом вход релейного элемента подключен к выходу задатчика частоты вращения, а выход - к входу интегратора, соединенного выходом с другим входом релейного элемента, с первыми входами пер0 вого и второго сумматоров и с одним из входов элемента умножения, второй вход которого подключен к выходу задатчика радиуса поворота, а выход - к второму входу первого сумматора непосредственно, к вто5 рому входу второго сумматора - через первый инвертор и к первому входу третьего сумматора - через элемент дифференцирования, выход первого и второго сумматоров подключены к вторым входам регуляторов
0 частоты вращения соответственно, выход одного из которых соединен с вторым входом третьего сумматора через второй инвертор, а выход другого - с третьим входом третьего сумматора непосредственно, вы5 ход которого соединен с выходом нелинейного элемента, подключенного выходом непосредственно к третьему входу одного и через третий инвертор - к третьему входу другого регулятора частоты вращения.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА | 2001 |
|
RU2187437C1 |
| Устройство для управления движением транспортного средства | 1981 |
|
SU1062048A1 |
| Устройство для управления электроприводом транспортного средства с тяговыми двигателями, преимущественно независимого возбуждения | 1990 |
|
SU1766726A1 |
| Устройство управления транспортным средством | 1990 |
|
SU1766725A1 |
| Тяговый электропривод переменного тока для транспортного средства | 1983 |
|
SU1185530A1 |
| Устройство для управления тяговым электроприводом автономного транспортного средства | 1984 |
|
SU1245456A1 |
| САМОХОДНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 1986 |
|
SU1441674A1 |
| Устройство для регулирования скорости транспортного средства | 1986 |
|
SU1428618A1 |
| Устройство для регулирования скорости рельсового транспортного средства | 1989 |
|
SU1705149A1 |
| Система управления транспортным средством | 1987 |
|
SU1550480A1 |
Изобретение относится к транспорту, в частности к устройствам управления транспортными средствами. Цель - повышение маневренности. Регуляторы 16 и 17 частот вращения электродвигателей 1 и 2 разных бортов колес транспортного средства по сигналам от задатчика 3 скорости, за датчика 4 радиуса поворота и датчиков 18 и 19 частот вращения с помощью сумматоров 10 и 11 формируют необходимую частоту вращения соответственно правого и левого тяговых электродвигателей. Третий сумматор 12с нелинейным элементом 20 корректирует работу регуляторов на разности моментов, создаваемых правым и левым электродвигателями при повороте, что повышает маневренность транспортного средства. 3 ил. Ј VI О hO Фиг1
| Устройство для регулирования скорости рельсового транспортного средства | 1988 |
|
SU1544609A1 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
| Устройство для управления тяговым электроприводом автономного транспортного средства | 1984 |
|
SU1245456A1 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
| Устройство для управления движением транспортного средства | 1981 |
|
SU1062048A1 |
| кл | |||
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
