Изобретение относится к механиз а- ,ции и автоматизации -открытых горных разработок и может быть использовано для автоматического регулирования бо- КО.ВОЙ скорости драг, земснарядов.
Цель изобретения - повышение производительности драгирования путем увеличения точности и быстродействия электропривода лебедок носовых кана- тов драги.
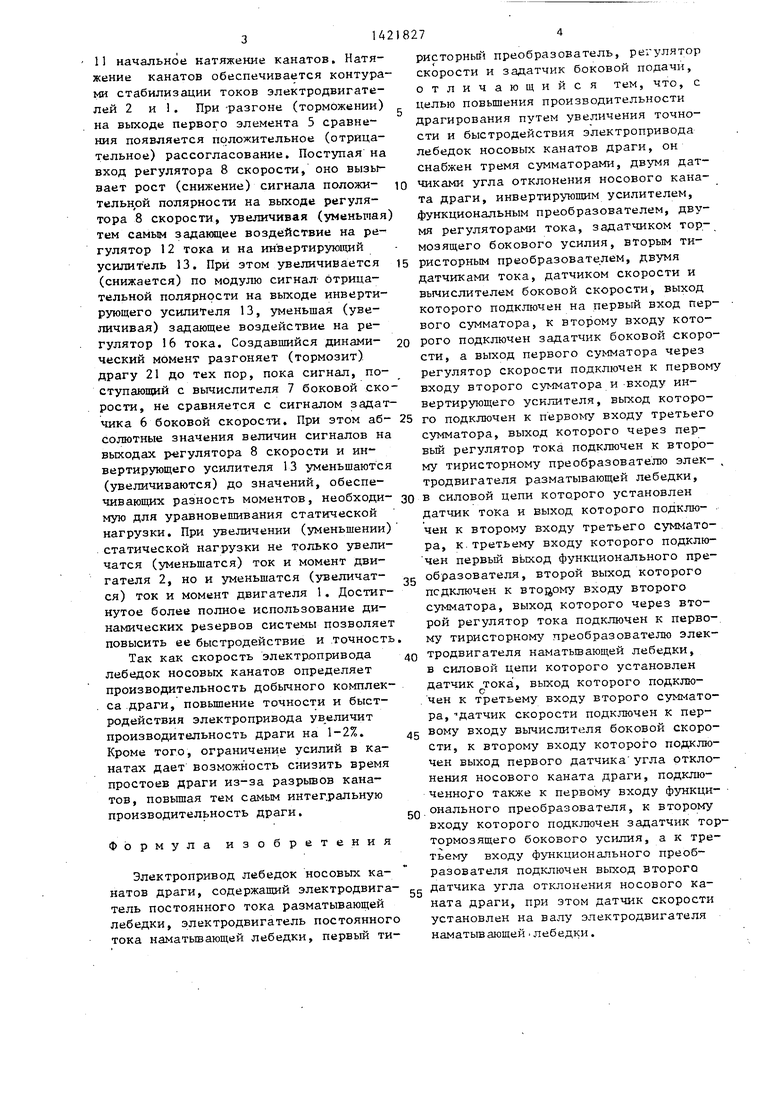
На чертеже изображена схема электропривода лебедок носовых канатов.
Электропривод содержит электродвигатель 1 разматьшающей лебедки (РЛ) и электродвигатель ,2 наматьшающей лебедки (НЛ), якорные цепи которых подключены соответственно к первому 3 и второму 4 тиристорным преобразовате- лям, первый элемент 5 сравнения, первый вход которого соединен с выходом задатчика 6 боковой скорости, второй вход - с выходом вычислителя 7 боковой скорости, а выход подключен к входу регулятора 8 скорости, второй элемент 9 сравнения, первый вход которого соединен с выходом регулятора 8 скорости, второй вход с выходом датчика 10 тока электродвигателя 2, третий вход с первым выходом функционального преобразователя 11, а выход подключен через первый регулятор 12 тока к первому тиристорному преобразователю 4, инвертирующий усилитель 13, вход которого соединен с выходом регулятора 8 скорости, третий элемент 14 сравнения, первый вход которого соединен с выходом инвертирующего усилителя 13, второй вход с выходом датчика тока 15 электродвигателя 1, третий вход с вторым выходом функционашь ного преобразователя П,.а выход подключен через второй регулятор 16 тока к второму тиристорному преобразо- вателю 3, датчик 17 угла, выход которого подключен к первому входу вычислителя 7 боковой скорости и к первому входу функционального преобразователя 11, датчик 18 угла, выход которого подключен к второму входу функциональ ного преобразователя 11, задатчик 19 тормозящего бокового усилителя, выход которого подключен к третьему входу функционального преобразователя 11, датчик 20 скорости электродвигателя 2, выход которого подключен к второму входу вычислителя 7 боковой скорости, драга 21.
С помощью датчика углового перемещения (например, сельсина), закрепленного вертикально вдоль оси носового ролика, измеряется угол поворота поворотной обоймы носового ролика вокруг era оси. Измеренньй угол есть угол отклонения носового,каната от перпендикуляра к продольной оси драги
Поскольку непосредственными объектами . управления являются усилия в канатах и скорос.ти электродвигателей 1 и 2, в устройство введены вычислитель 7 боковой скорости и функциональный преобразователь 1 1, позволяквдее. учест геометрию канатов.
Вычислитель 7 боковой скорости определяет боковую скорость драги 2 в соответствии с формулой
V -
V --
в COS Ч,
где Vg - боковая скорость драги 21; V| - скорость каната лебедки, пропорциональная скорости электродвигателя НЛ2; с|, - угол отклонения носового каната от перпендикуляра к продольной оси драги 21, Функциональный преобразователь I1 преобразует сигнал с задатчика 19 тормозящего бокового усилия в сигналы задания усилий в канатах НЛ и РЛ в соответствии с формулами
FO
FO
, COS Ц1
1 COS Lfj
20 25 Q - ,
40
50
где F и F - соответственно сигналы на первом и втором вькодах функционального преобразователя 11; FQ - сигнал с задатчика 19
тормозящего усилия; tf - угол отклонения носового каната лебедки от перпендикуляра к продольной оси дрА- ги 21.
Регулятор 8 скорости и регуляторы 12 и 16 тока вьтолнены пропорционально-интегральными .
Электропривод работает следующим образом. t
В исходном состоянии сигнал на выходе задатчика 6 боковой скорости равен нулю, сигнал на выходе задатч йса 19 тормозящего бокового усилия задает через функциональный преобразователь
11 начальнсзе натяжение канатов. Натяжение канатов обеспечивается контурами стабилизации токов электродвигателей 2 и 1. При -разгоне (торможении) на выходе первого элемента 5 сравнения появляется положительное (отрицательное) рассогласование. Поступая на вход регулятора 8 скорости, оно вызывает рост (снижение) сигнала положи- тельнрй полярности на выходе регулятора 8 скорости, увеличивая (уменьршя тем самым задающее воздействие на регулятор 12 тока и на инвертирующий усилитель 13. При этом увеличивается (снижается) по модулю сигнал- отрицательной полярности на выходе инвертирующего усилителя 13, уменьшая (увеличивая) задающее воздействие на регулятор 16 тока. Создавшийся динамический момент разгоняет (тормозит) драгу 21 до тех пор, пока сигнал, поступающий с вычислителя 7 боковой скорости, не сравняется с сигналом задат чика 6 боковой скорости. При этом абсолютные значения величин сигналов на выходах регулятора 8 скорости и ин вертирующего усилителя 13 уменьшаются (увеличиваются) до значений, обеспечивающих разность моментов, необходимую для уравновешивания статической нагрузки. При увеличении (уменьшении) статической нагрузки не только увеличатся (уменьшатся) ток и момент двигателя 2, но и уменьшатся (увеличатся) ток и момент двигателя 1. Достигнутое более полное использование динамических резервов системы позволяет повысить ее быстродействие и точность
Так как скорость электропривода лебедок носовых канатов определяет производительность добычного комплекса драги, повьш1ение точности и быстродействия электропривода увеличит производительность драги на 1-2%. Кроме того, ограничение усилий в канатах дает возможность снизить время простоев драги из-за разрьшов канатов, повышая тем самым интегральную производительность драги.
Формула изобретения
Электропривод лебедок носовых канатов драги, содержащий электродвигатель постоянного тока разматывающей лебедки, электродвигатель постоянного тока наматьшающей лебедки, первый ти0
5
0
5
ристорньй преобразователь, регулятор скорости и задатчик боковой подачи, отличающийся тем, что, с целью повьш1ения производительности драгирования путем увеличения точности и быстродействия электропривода лебедок носовых канатов драги, он снабжен тремя сумматорами, двумя датчиками угла отклонения носового каната драги, инвертирующим усилителем, функциональным преобразователем, двумя регуляторами тока, задатчиком тормозящего бокового усилия, вторым ти- ристорным преобразователем, двумя датчиками тока, датчиком скорости и вычислителем боковой скорости, выход которого подключен на первый вход первого сумматора, к второму входу которого подключен задатчик боковой скорости, а выход первого суьматора через регулятор скорости подключен к первому входу второго сумматора и -входу инвертирующего усилителя, выход которого подключен к первому входу третьего сумматора, выход которого через первый регулятор тока подключен к второму тиристорному преобразователю элек- , тродвигателя разматывающей лебедки, в силовой цепи которого установлен датчик тока и выход которого подключен к второму входу третьего сумматора, к.третьему входу которого подклю- чен первый вьгход функционального прее образователя, второй выход которого подключен к втоо,ому входу второго сумматора, выход которого через второй регулятор тока подключен к первому тиристорному преобразователю электродвигателя наматьтающей лебедки, в силовой цепи которого установлен
выход которого подклю- к третьему входу второго сумматора, датчик скорости подключен к пер- 5 вому входу вычислителя боковой скорости, к второму входу которого подключен выход первого датчика угла отклонения носового каната драги, подключенного также к первому входу функци- онального преобразователя, к второму входу которого подключен задатчик тор- тормозящего бокового усилия, а к третьему входу функционального преобразователя подключен выход второго датчика угла отклонения носового каната драги, при этом датчик скорости установлен на валу электродвигателя наматыв ающейлебедки.
0
0
датчик тока, чен
0
5
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления добычным комплексом драги | 1982 |
|
SU1114745A1 |
| Устройство для автоматического регулирования добычного комплекса драги | 1980 |
|
SU1076538A1 |
| Устройство для автоматического регулирования нагрузки черпаковой цепи драги | 1977 |
|
SU682604A1 |
| Устройство регулирования производительности драги | 1986 |
|
SU1372018A1 |
| Устройство управления добычным комплексом драги | 1987 |
|
SU1481428A1 |
| Устройство управления добычным комплексом драги | 1980 |
|
SU972005A1 |
| Устройство для регулирования привода черпаковой цепи многочерпакового земснаряда | 1983 |
|
SU1150312A1 |
| Устройство управления добычным комплексом драги | 1981 |
|
SU994627A2 |
| Адаптивный регулятор производительности добычного аппарата драги | 1985 |
|
SU1270221A1 |
| Система передачи грузов между судами в море | 1988 |
|
SU1594063A1 |
Изобретение отноЬится к механизации и автоматизации открытых горных разработок. Цель - повышение произв- сти драгирования путем увеличения точности и быстродействия электропривода лебедок носовых канатов драги 21, Устр-во содержит электродвигатели 1 и 2 постоянного тока разматьшающей и наматьшающей лебедок, тиристорный преобразователь (П) 3, регулятор (Р) 8 скорости и задатчик 6 боковой скорости подачи. Дополнительно устр-во снабжено сумматорами 5, 9 и 14, датчиками 17 и 18 угла отклонения носового каната драги 21, инвертирующим усилителем 13, функциональным ПИ, Р 12 и 16 тока, задатчиком 19 тормозящего бокового усилия, вторым тири- сторным П 4, датчиками тока 10, 15 и скорости 20 и вычислителем 7 боковой скорости. При разгоне (торможении) сигнал рассогласования с сумматора 5 поступает на вход Р 8 и вызывает на его выходе рост (снижение) сигнала положительной полярности, увеличивая (уменьшая) задающее воздействие на Р 12 и через усилитель 13 -на Р Г6. Создавшийся динамический моМент разгоняет (тормозит) драгу 21 до тех пор, пока сигнал, поступающий с вычислителя 7, не сравняется с сигналом с задатчика 6. 1 ил. g (Л Ю S к ч 
| Ильинский Н | |||
| Ф | |||
| и др | |||
| Новый электропривод лебедок землесосного снаряда | |||
| - Труды МЭИ, | |||
| Чугунный экономайзер с вертикально-расположенными трубами с поперечными ребрами | 1911 |
|
SU1978A1 |
| Способ получения и применения продуктов конденсации фенола или его гомологов с альдегидами | 1920 |
|
SU362A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Пономарев В | |||
| Б.,Пуценко В | |||
| И | |||
| и др | |||
| ШкаФь управления электроприводом и добычного аппарата драг | |||
| М.: Цветная металлургия, 1985, № 11, с | |||
| Горный компас | 0 |
|
SU81A1 |
