Изобретение относится к добыче полезных ископаемых и может найти применение для автоматизации процесса драгирования.
Известно устройство управления добычным комплексом драги, содержащее контур регулирования нагрузки бочки, включающий датчик и задатчик нагрузки привода бочки, подключенные к сумматору, дифференцирующий усилитель, вход которого соединен с датчиком нагрузки привода бочки, а выход подключен к сумматору, и усилитель, подключенный к суммирующему усилителю контура регулирования скорости черпания, включающего датчик и задатчик нагрузки привода черпаковой цепи подключенные к сумматору, соединенному с суммирующим усилителем, выход которого подключен к тиристорному приводу черпаковой цепи и к входу множительно-делительного устройства контура регулирования скорости боковой подачи, включающего датчика угла поворота драги, датчик угловой скорости драги, сумматор и усилитель, выход которого подключен к тиристорному приводу лебедок носовых канатов 1
„ „
Устройство регулирует скорости
приводов черпаковой цепи и боковой подачи одновременно и пропорционально в зависимости от нагрузки привода черпаковой цепи или от нагрузки привода бочки, причем дифференцирующий усилитель ограничивает темп нарастания нагрузки бочки при подходе нагрузки к заданному значению.
Наиболее близким к изобретению является устройство управления добычным комплексом драги, содержещее датчик и задатчик нагрузки привода бочки, подключенные к входам первого сумматора, выход которого подключен через первый усилитель к первому вхо ду суммирующего усилителя, к второму входу которого подключены черезвторой сумматор датчик и задатчик нагруки привода черпаковой цепи, а к выходу суммирующего усилителя подключены привод черпаковой цепи и первый вход множительно-д€литег ьного устройства, второй вход которого подключен к датчику угла поворота драги, а выход подключен к первому входу третьего сумматора, второй вход которого подключен к датчику угловой скорости дрги, а выход подключен через второй
усилитель к приводу лебедки носовых канатов, кроме того устройство содержит дифференциальный усилитель, вход которого прдключен к датчику нагрузки привода бочки, а выход подключен к третьему входу первого сумматора и к первому входу второго сум «1рующего усилителя, другой вход которого подключен к задатчику опорного сигнала скорости изменения нагрузки бочки, а выход - к четвертому входу первого сумматора 21 ,
Недостатком известного регулятора является низкая точность.
Действительно нагрузка бочки имеет в установившемся режиме колебательный характер, обусловленный неравномерностью перекатывания породы в бочке. Когда сегмент породы подни мается вместе с бочкой, момент нагрузки ее увеличивается, когда порода скатывается из верхнего положения вниз - момент нагрузки падает. Амплитуда этих колебаний может достигать до 20% от среднего значения нагрузки, а частота составляет доли герца. Возмущения от колебания нагрузки бочки снижают динамические качества системы управления добычным комплексом, так как, если увеличивать постоянную времени сглаживающего фильтра датчика нагрузки бочки, то снижается эффект от применения дифференцирующего усилителя (опоздание регулирующего воздействия при изменении нагрузки). Если постоянная времени фильтра небольшая, то система управления добычным комштексом драги входит в автоколебательный режим с частотой изменения нагрузки бочки. I
Все это не позволяет достигать точного управления режимом работы драги.
Целью изобретения является повышение точности управления.
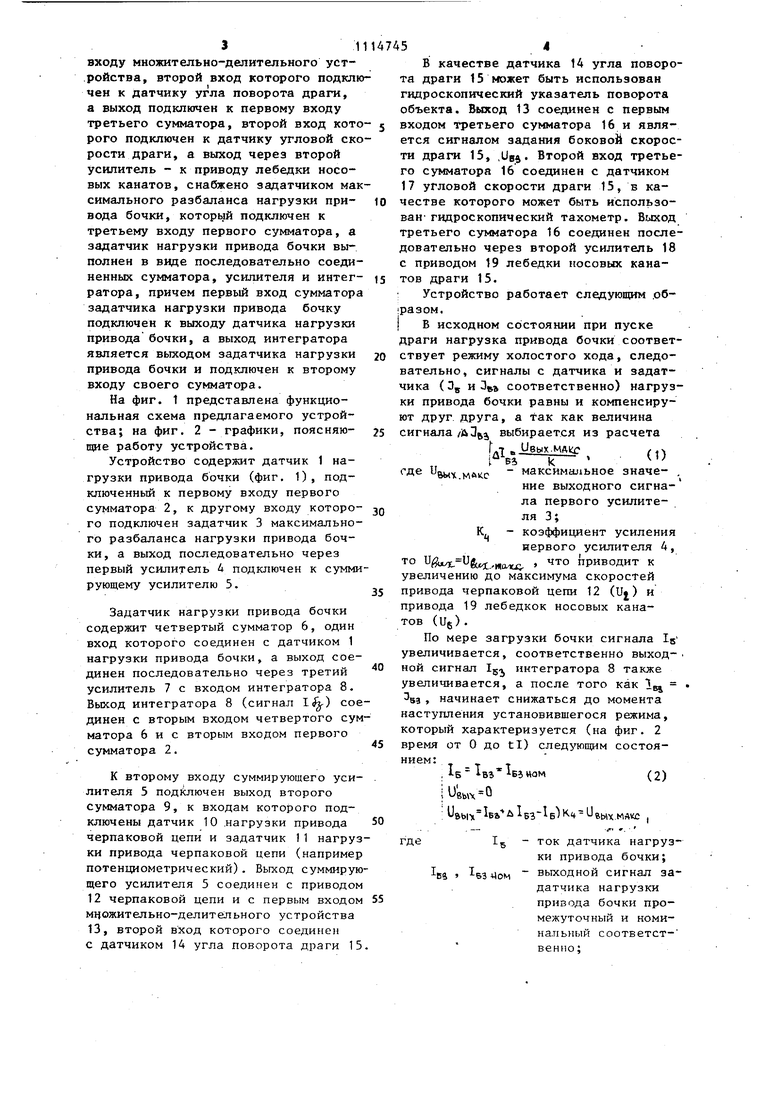
Поставленная цель достигается тем, что устройство управления добычным комплексом драги, содержащее датчик и задатчик нагрузки привода бочки, подключенные к входам первого сум . матора, выход которого подключен через первый усилитель к первому входу суммирующего усилителя, к второму входу которого подключены через второй сумматор датчик и задатчик нагрузKJH привода черпаковой цепи, а выход суммирующего усилителя подключен к приводу черпаковой цепи и первому входу множительно-делительного устройства, второй вход которого подклю чен к датчику угла поворота драги, а выход подключен к первому входу третьего сумматора, второй вход кото рого подключен к датчику угловой ско рости драги, а выход через второй усилитель - к приводу лебедки носовых канатов, снабжено задатчиком мак симального разбаланса нагрузки привода бочки, который подключен к третьему входу первого сумматора, а задатчик нагрузки привода бочки выполнен в виде последовательно соединенных сумматора, усилителя и интегратора, причем первый вход сумматора задатчика нагрузки привода бочку подключен к выходу датчика нагрузки привода бочки, а выход интегратора является выходом задатчика нагрузки привода бочки и подключен к второму входу своего сумматора. На фиг. 1 представлена функциональная схема предлагаемого устройства; на фиг. 2 - графики, поясняющие работу устройства. Устройство содержит датчик 1 нагрузки привода бочки (фиг. 1), подключенный к первому входу первого сумматора 2, к другому входу которого подключен задатчик 3 максимального разбаланса нагрузки привода бочки, а выход последовательно через первый усилитель 4 подключен к сумми рующему усилителю 5. Задатчик нагрузки привода бочки содержит четвертый сумматор 6, один вход которого соединен с датчиком 1 нагрузки привода бочки, а выход соединен последовательно через третий усилитель 7 с входом интегратора 8. Выход интегратора 8 (сигнал 1) сое динен с вторым входом четвертого сум матора бис вторым входом первого сумматора 2. К второму входу суммирующего усилителя 5 подключен выход второго сумматора 9, к входам которого подключены датчик 10 .нагрузки привода черпаковой цепи и задатчик 11 нагруз ки привода черпаковой цепи (например потенциометрический). Выход суммирую щего усилителя 5 соединен с приводом 12 черпаковой цепи и с первым входом мчожительно-делительного устройства 13, второй вход которого соединен с датчиком 14 угла поворота драги 15 В качестве датчика 14 угла поворота драги 15 может быть использован гидроскопический указатель поворота объекта. Выход 13 соединен с первым входом третьего сумматора 16 и является сигналом задания боковой скорости драги 15, .UBJ. Второй вход третьего сумматора 16 соединен с датчиком 17 угловой скорости драги 15, в качестве которого может быть использован- гидроскопический тахометр. Выход третьего сумматора 16 соединен последовательно через второй усилитель 18 с приводом 19 лебедки носовых канатов драги 15. Устройство работает следующим .об разом. I В исходном состоянии при пуске драги нагрузка привода бочки соответствует режиму холостого хода, следовательно, сигналы с датчика и задатчика (Лд и 3ft соответственно) нагрузки привода бочки равны и компенсируют друг друга, а так как величина сигнала выбирается из расчета Uv. (1) где и мйк.с максимальное значе- . ние выходного сигнала первого усилителя 3; Kj - коэффициент усиления первого усилителя 4, то .,Hiaxe- приводит к увеличению до максимума скоростей привода черпаковой цепи 12 (U) и привода 19 лебедкок носовых канатов (Ug). По мере загрузки бочки сигнала IB увеличивается, соответственно выходной сигнал Igj интегратора 8 также увеличивается, а после того как 53, начинает снижаться до момента наступления установившегося режима, который характеризуется (на фиг. 2 время от О до tl) следующим состоянием: , Б ва Бецам I : Uftbi-4 ba AlB3 B) -JawxMAvic где Ig ток датчика нагрузки привода бочки; Ci БЗ 40М выходной сигнал задатчика нагрузки привода бочки промежуточный и номинальный соответственпо;сигнал выхода третьего усилителя 7 (вход интеграто-Р 8); сигнал выхода первого усилителя 4; сигнал задатчика максимального разбаланса нагрузки привода 3 бочки. Производительность добычного комп лекса драги определяется из выраженияa.-U2-c: I H, (3) где q - емкость черпака; К коэффициент наполнения чер пака; Vn. - скорость черпания. В процессе нарастания нагрузки привода бочки (например при появлении мягких грунтов) на выходе усилителя 7 сигнал UBt,j MAfcc выходе интегратора 8 сигнал igj нарастает с заданным темпом (момент времени с t/ по t ). Если темп возрастания нагрузки бочки идет быстрее, чем заданный, то разница между () Б уменьшается , сигнал Ug,, также уменьшается и соответственно снижаются V и VB . Таким образом темпы нарастания Б IB-I ныреживаются одинаковыми. Темп нарастания сигнала задается настройкой постоянной времени интегратора 8 и подбирается опытным путем при наладке устройства для режима с максимальной горизонтальност добычного комплекса. С момента времени t по t наблю дается снова установившийся режим достояния добычного комплекса. При этом интегратор 8 находится в насыщении, сигна IftS Mutcc дальней шем росте нагрузки бочки разность сигналов (ва,йЗБа) может умень шаться вплоть до О (также и скорост VP и VB). В процессе спада нагрузки бочки (момент времени с tj по t) коэффиц ент наполнения черпаков К уменьшается, Ьроизводительность Q снижает ся, 1е. 1БЗ сигнал .Uabi rMAklc няет свой знак на обратный. При это Igj начинает уменьшаться с заданным темпом, скорости V и V увеличивае ся до тех пор, пока не прекратится снижение Ig . . Таким образом, назначение усовершенствованного .задатчика нагрузки привода бочки сводится к поддержанию равенства темпов нарастания сигналов задания Igj и нагрузки привода; бочки Ig . Для драг 250 л с временем прохождения породы по длине бочки порядка 50 с, постоянная времени интегратора 8 примерно этой же величины, поэтому колебания сигнала из-за колебаний Ig, связанных с перекатыванием породы в бочке, незначительны. Мало того, сигнал g в предлагаемом устройстве может быть задемпфирован сглаживающим фильтром с небольшой постоянной времени (порядка 1-5 с) что недопустимо в известных устройствах с дифференцирующим усилителем, где для устранения режима автоколебания скоростей V и Vg постоянная времени такого демпфера должна быть несколько десятков секунд. При постоянстве сигнала Р бота элементов регулирования скоростей черпания и боковой подачи таких же, как у аналогичных элементов известных устройств. Например, при увеличении крепости грунта сигнал с датчика 10 нагрузки черпаковой цепи увеличится и при значении 1.т.,- сигнала на выходе суммирующего усилителя 5 пропорционально снизился, что вызовет понижение скорости привода черпа- . ковой цепи Uf . Одновременно снижается сигнал на вьсходе МДУ 13, в результате чего происходит снижение скорости привода 19 лебедки носовых канатов Vg . Снижение скоростей V и Vg происходит до момента равенства If-l При снижении тока нагрузки привода 12 черпаковой цепи ниже заданного, происходит соответственное увеличение скоростей Vj. и Vis. На выходе МДУ 13 формируется сигнал задания скорости боковой подачи V JJ , который сравнивается с сигналом обратной связи VBOC , поступающим с датчика 17 угла поворота. Регулирующее воздействие с выхода сумматора 16, усиленное.усилителем 18, поступает на вход привода 19 лебедок носовых канатов. Скорость UB поддерживается автономно постоянной в соотвествии с заданием. В сравнении с известным,предлагаемое устройство позволит повысить производительность добычного комплекса
7 .1114745
s среднем на 1-2%, что для драг с ем- 8,5 -17,0 тыс.м в год, что при костью ковша 250 л с годовой средней стоимости 1- м горной массы 0,57 производительностью 850 тыс.м соста- руб. составит 4,8 - 10 тыс. руб. вит прирост переработки горной массы в год.


| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления добычным комплексом драги | 1981 |
|
SU994627A2 |
| Устройство управления добычным комплексом драги | 1986 |
|
SU1434038A1 |
| Устройство управления добычным комплексом драги | 1979 |
|
SU876862A1 |
| Устройство управления добычным комплексом драги | 1980 |
|
SU972005A1 |
| Устройство регулирования производительности драги | 1986 |
|
SU1372018A1 |
| Устройство для автоматического регулирования добычного комплекса драги | 1980 |
|
SU1076538A1 |
| Устройство управления добычным комплексом драги | 1987 |
|
SU1481428A1 |
| Способ автоматического управления процессом драгирования | 1988 |
|
SU1609877A1 |
| Способ автоматического управления процессом драгирования и устройство для его осуществления | 1981 |
|
SU968196A1 |
| Электропривод лебедок носовых канатов драги | 1986 |
|
SU1421827A1 |

УСТРОЙСТВО УПР.АВЛР:НИЯ ДОБЫЧНЬИ КОМПЛЕКСОМ ДРАГИ, содержап(ее датчик и чадатчик нагрузки привода бочки, подключенные к входам первого сумматора, выход которого подключен через первый усилитель к первому входу суммирующего усилителя, к второму входу которого подключены через второй сумматор датчик и задатчик. нагрузки привода черпаковой цепи, a выход суммирующего усилителя подключен к приводу черпаковой цепи и первому входу множительно-делительного устройства, второй вход которого подключен к датчику угла поворота драги, a выход подключен к первому входу третьего сумматора, второй вход которого подключен к датчику угловой скорости драги, a выход через второй усилитель - к приводу лебедки носовых канатов, отличающееся тем, что, с целью повышения точности управления, оно снабжено задатчиком максимального разбаланса нагрузки привода бочки, который подключен к третьему входу первого сумматора, a задатчик }1агрузки привода бочки выполнен г (Л в виде последовательно соединенных сумматора, усилителя и интегратора, причем первый вход сумматора задатчика.нагрузки привода бочки подключен к выходу датчика нагрузки привода бочки, a выход интегратора является § выходом задатчика нагрузки привода бочки и подключен к второму входу своего сумматора. 4 4 сд
Фив.1
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Чугун | 1974 |
|
SU494427A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство управления добычным комплексом драги | 1979 |
|
SU876862A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
