Фиг.1
Изобретение относится к судостроению, в частности к системам для передачи грузов между судами в море в условиях качки.
Цель изобретения - повышение надежности системы.
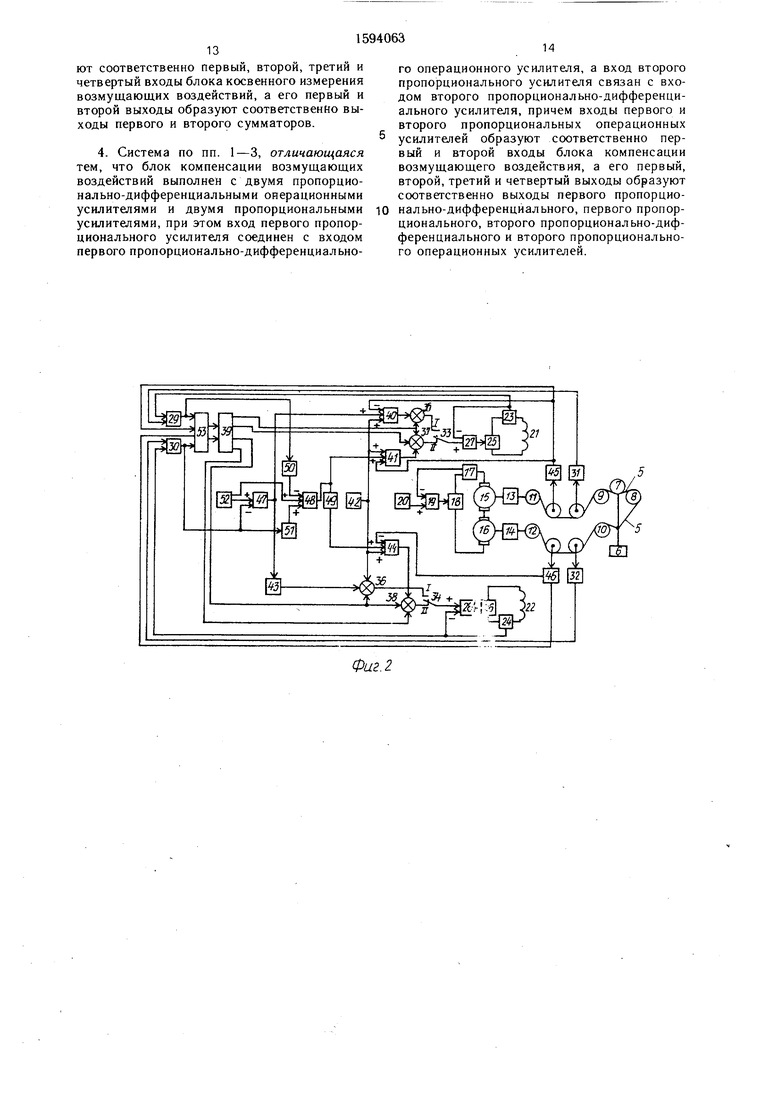
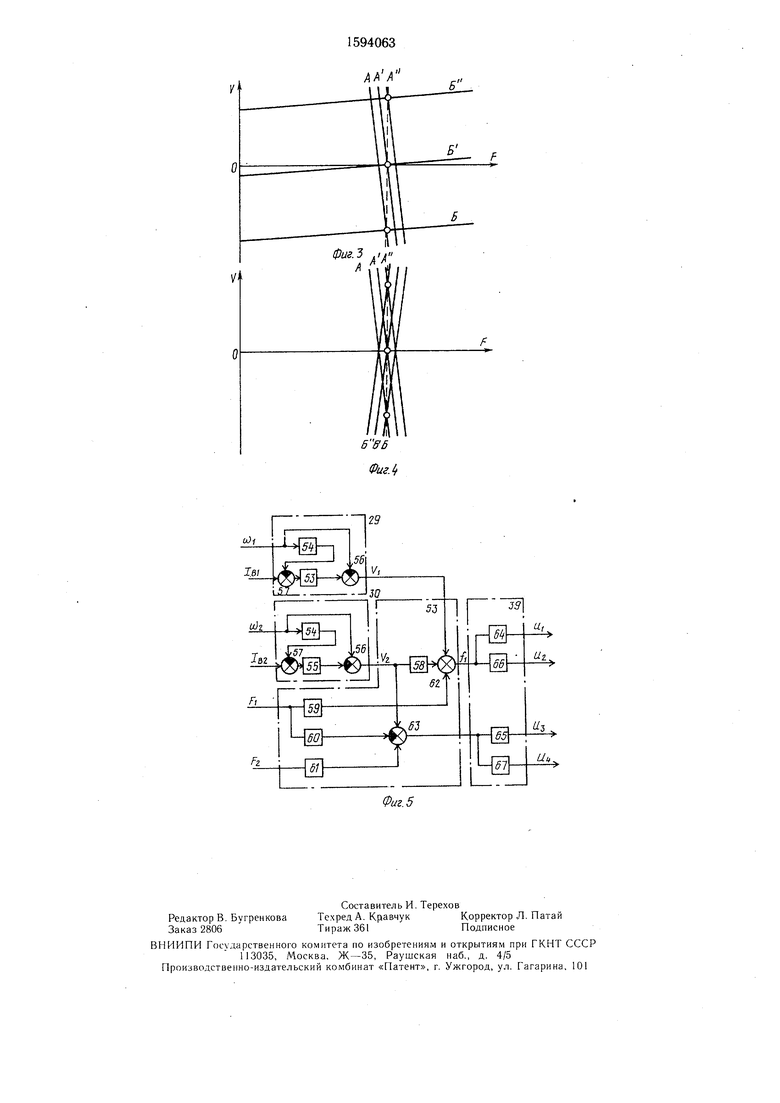
На фиг. 1 изображена кинематическая схема системы; на фиг. 2 - функциональная схема системы; на фиг. 3 - механические характеристики электродвигателей при нахождении тележки передающего судна; на фиг. 4 - то же, при нахождении тележки в зоне принимающего судна; на фиг. 5 - блок-схема устройства компенсации возмущающих воздействий.
Система для передачи грузов между передающим 1 и принимающим 2 суднами содержит мачты 3 и 4, между которыми натянуты ветви каната 5. Груз находится в тележке 6, имеющей блок 7 и жестко связанной с нижней ветвью каната 5, огибающего блок 8 на мачте 4 принимающего судна 2, а также блоки 9 и 10 на мачте 3 передающего судна 1, соединенного с тяговьщи лебедками 11 и 12. Лебедки 11 и 12 через редукторы 13 и 14 соединены со своими электродвигателями 15 и 16 постоянного тока, обмотки якорей которых последовательно соединены между собой и с датчиком 17 тока и подключены к выходу тиристорного преобразователя 18, который своим входом связан с выходом блока 19 регулирования тока, а входы последнего соединены с выходами задатчика 20 тока и датчика 17 тока. Обмотки 21 и 22 возбуждения электродвигателей 15 и 16 последовательно соединены с соответствующими датчиками 23 и 24 токов возбуждения и подключены к тиристорным преобразователям 25 и 26 тока возбуждения, которые своими входами связаны с выходами блоков 27 и 28 регулирования токов возбуждения, имеющих по два входа. Первые их входы соединены с выходами датчиков 23 и 24 токов возбуждения. Кроме того, выходы датчиков 23 и 24 токов возбуждения подключены к первым входам блоков 29 и 30 косвенного измерения скоростей перемещения ветвей каната 5.
Вторые входы этих блоков 29 и 30 соединены с выходами датчиков 31 и 32 скоростей перемещения ветвей каната 5. Вторые входы блоков 27 и 28 регулирования токов возбуждения с помощью контактов 33 и 34 подключаются к выходам сумматоров 35 и 36 или 37 и 38 соответственно. Сумматор 35 имеет два входа, сумматоры 36-38 - по три входа. Первые входы сумматоров 35 и 37 связаны с первым выходом блока 39 компенсации возмущающих воздействий, вторые входи этих сум маторов соединены соответственно с выходом блока 40 регулирования натяжения каната и вторым выходом блока 39, а третий вход сумматора 37 соединен с выходом блока 41 регулирования натяжения каната. Первые входы сумматоров 36 и 38 соединены с третьим выходом бло0
ка 39 компенсации возмущающих воздействий, вторые входы этих сумматоров соединены соответственно с выходом задатчика 42 сигналов натяжения каната 5 и с четвертым
выходом блока 39, а третьи входы сумматоров соответственно связаны с выходом инвертора 43 и блока 44 регулирования натяжения каната, nepsbie входы блоков 40 и 41 регулирования натяжения каната связаны с выходом датчика 45 натяжения каната, а
первый вход блока 44 регулирования натяжения каната связан с выходом датчика 46 натяжения каната. Вторые входы этих блоков 40, 41, 44 связаны с выходом задатчика 42 сигнала натяжения каната, а их третьи
5 входы соответственно с выходами блоков 47 и 48 регулирования скорости перемещения тележки и инвертора 49, при этом выходы блоков 47 и 48 также связаны соответственно с входами инверторов 43 и 49. Блоки 47 и 48 регулирования скорости тележки имеют соответственно два и три входа. Первый и второй входы блока 48 связаны соответственно с выходами усилителей 50 и 51, а третий вход - с выходом задатчика 52 сигнала скорости перемещения тележ5 ки, с которым также связан первый вход блока 47. Входы усилителей 50 и 51 связаны соответственно с выходами блоков 29 и 30 косвенного измерения скорости перемещения ветвей каната, при этом выход блока 29 связан также с первым входом блока 53 косвен0 ного измерения возмущающих воздействий, а выход блока 30 - с вторым входом блока 53 и вторым входом блока 47 регулирования скорости перемещения тележки. Третий и четвертый входы блока 53 связаны соответственно с выходами датчиков 45 и 46 натяже5 ния каната, а два его выхода соединены соответственно с первым и вторым входами блока 39 компенсации возмущающих воздействий. При этом блок 53 совместно с блоками 29, 30 и 39 составляет устройство ком„ пенсации возмущающих воздействий.
Каждый блок 29, 30 косвенного измерения скорости перемещения ветвей каната 5 выполнен с пропорционально-дифференциальным операционным усилителем 54, диффе5 ренцирующим операционным усилителем 55 и двумя сумматорами 56 и 57, имеющими по два входа и по одному выходу.
Усилитель 54 связан своим входом и выходом соответственно с первыми входами сумматоров 56 и 57, а усилитель 55 связан свои0 ми входом и выходом соответственно с выходом сумматора 57 и вторым входом сумматора 56, при этом второй вход сумматора 57 и первый вход сумматора 56 образуют соответственно первый и второй входы блока косвенного измерения скорости перемещения
ветвей каната, а его выход образует выход сумматора 56.
Блок 53 косвенного измерения возмущающих воздействий содержит пропорциональный операционный усилитель 58, три интегрирующих усилителя 59-61 и два сумматора 62 и 63, имеющих по три входа.
Выходы усилителей 59 и 60 соединены между собой, при этом выход усилителя 59 соединен с первым входом сумматора 62, а выход усилителя 60 - с первым входом сумматора 63, связанного своим вторым входом с выходом интегрирующего операционного усилителя 61, а третьим - с входом пропорционального операционного усилителя 58, выход которого связан с вторым входом сумматора 62, при этом третьи входы сумматоров 62 и 63 и входы интегрирующих усилителей 60 и 61 образуют соответственно первый, второй и третий, четвертый входы блока 56 косвенного измерения возмущающих воздействий, а первый и второй выходы последнего образуют соответственно выходы сумматоров 62 и 63.
Блок 39 компенсации возмущающих воздействий содержит пропорционально-дифференциальные операционные усилители 64 и 65 и пропорциональные операционные усилители 66 и 67, при этом входы усилителей 64 и 66, а также усилителей 65 и 67 соединены между собой и образуют соответственно первый и второй входы блока 39 компенсации зозмущающих воздействий, первый, второй, гретий и четвертый выходы которого образуют соответственно выходы усилителей 64 66, 65 и 67.
Система передачи грузов между судами имеет изменяемую структуру, обеспечивающую слежение грузовой тележки за точками подвеса ветвей каната на передающем или принимающем судах в зависимости от положения грузовой тележки.
При нахождении грузовой тележки 6 в зоне передающего судна 1 контакты 33 и 34 переключателя режимов работы установлены в положение I и система работает следующим образом. В исходном состоянии сигналы управления на входах тиристорных преобразователей 18, 25 и 26 равны нулю, и натяжение ветвей каната 5 также равно нулю. Для задания натяжения сначала устанавливается заданная величина тока в якорной цепи электродвигателей 15 и 16. Для этого задатчиком 20 тока устанайливается номинальный сигнал задания тока на входе блока 19 регулирования тока и далее на входе тиристорного преобразователя 18. На выходе 5ТОГО преобразователя появится напряжение, и в якорной цепи электродвигателей 15 и 16 - ток. Как только величина тока в якорной цепи электродвигателей 15 и 16 станет больще заданного значения, с выхода датчика 17 тока на вход регулятора 19 тока подается сигнал обратной связи, уменьшающий напряжение тиристорного преобразователя, ограничивая величину тока в якорной цепи электродвигателей заданным значением.
Затем задатчиком 42 сигналов натяжения каната подается задающий сигнал на вход
блока 40 регулирования натяжения каната и вход сумматора 36, далее через сумматор 35, контакты 33 и 34 и блоки 27 и 28 регулирования токов возбуждения сигнал по- ступает на входы тиристорных преобразователей 25 и 26 возбуждения. На выходах последних появляются положительные напряжения, а в обмотках 21 я 22 возбуждения - токи. Электродвигатели 15 и 16 начнут вращаться, выбирая слабину каната. Благо- 10 даря действию отрицательной обратной связи по току возбуждения в каждом контуре регулирования натяжения происходит форсированный разгон электродвигателей при постоянных величинах токов возбуждения, со- g отвегствующих сигналу задания натяжения. По мере работы электродвигателей увеличиваются натяжения ветвей каната и увеличивается сигнал на выходе датчика 45 натяжения каната, сигнал разбаланса на входе блока 40 регулирования натяжения каната 20 уменьшается. В установившемся режим е электродвигатели неподвижны и развивают одинаковые тяговые усилия, равные заданному натяжению.
При отработке сигнала задания катяже- 2g ния с выхода блока 30 косвенного измерения скорости перемещения ветвей каната через блок 47 регулирования скорости перемещения тележки, инвертор 43 и сумматор 36 на вход блока 28 регулирования тока возбуждения поступает сигнал обратной связи по 30 скорости. В результате действия этого сигнала уменьшается ток возбуждения и скорость вращения электродвигателя 16, которая будет меньше скорости вращения электродвигателя 15. Таким образом, задание натяжения происходит при практически непод- g вижной грузовой тележке относительно передающего судна за счет работы электродвигателя 15.
Для перемещения грузовой тележки в направлении принимающего судна 2 задатчиком 52 сигнала скорости перемещения тележки подается задающий сигнал на вход блока 47 регулирования скорости перемещения тележки. С выхода последнего управляющий сигнал подается на входы блока 40 регулирования натяжения каната и инверто- 5 выхода этого инвертора измененный по знаку сигнал поступает на сумматор 36. В результате этого сигнал управления тиристорным преобразовататем 25 тока возбуждения увепичнвается, а 26 уменьшается. Это приводит к увеличению вращаю- Q щего момента атектродвигателя 15 и к уменьшению вращающего момента электродвигателя 16. Как татько разность моментов электродвигателей станет достаточна для преодоления момента трогания тяговых лебедок, начнется разгон грузовой тепежки в 5 направлении принимающего судна. При этом электродвигатель 15 работает в двигательном режиме, а электродвигатель 16 в генераторном, создавая тормозной момент и
0
подпитывая якорную цепь. С ростом скорости грузовой тележки увеличивается сигнал обратной связи с выхода блока 30 косвенного измерения скорости перемещения ветви каната. Это приводит к уменьшению сигнала разбаланса на входе блока 47 регулирования скорости перемещения тележки. В установившемся режиме электродвигатели развивают заданные моменты и заданную скорость. В процессе разгона грузовой тележки контур регулирования тока якорной цепи поддерживает заданное значение тока электродвигателей, поэтому разгон происходит практически при неизменном токе якорной цепи.
При перемещении грузовой тележки часть мощности, потребляемой электродвигателем 15, компенсируется электродвигателем 16, работающим в генераторном режиме, и мощность, потребляемая из сети тиристор- ным преобразователем 18, уменьщается.
Изменение направления движения грузовой тележки осуществляется изменением полярности сигнала задатчика 52 сигнала скорости перемещения тележки. В этом случае электродвигатель 16-переходит в двигательный режим, а электродвигатель 15 - в генераторный и подпитывает якорную цепь электродвигателей.
В процессе работы на систему передачи грузов действуют различные факторы. Основными из них являются качка судов на волнении и изменение геометрии ветвей каната при перемещении грузовой тележки. Для компенсации возмущающих воздействий этих факторов на натяжения ветвей каната и скорость перемещения грузовой тележки система передачи грузов содержит устройство косвенного измерения и компенсации возмущающих воздействий.
В блоках 29 и 30 косвенного измерения скрости перемещения ветвей каната формируются сигналы Vi, V2 скоростей перемещения соответственно верхней и нижней ветвей каната. На входы этих блоков подаются соответствующие сигналы (Oi, шг угловых скоростей барабанов тяговых лебедок 11 и 12 и соответствующие сигналы Ь|, Ь2 токов возбуждения электродвигателей 15 и 16. При неизменном токе якорной цепи эти токи возбуждения пропорциональны вращающим моментам электродвигателей. После преобразований сигналов на выходе блока 29 получается сигнал Vi скорости перемещения верхней ветви каната, равный
ТрР
Vi iB|-(T,p-fKi)o)i .
на выходе блока 30 - сигнал скорости перемещения нижней ветви каната, равный
V
(Т4Р+К2)Ш2
где Т|, Т4 - постоянные времени тяговых лебедок 11 и 12 соответственно; Т2, TS - постоянные времени жесткости соответственно верхней и нижней ветвей каната;
Тз, Тб - постоянные времени демпфирования соответственно верхней и нижней ветвей каната; Кь К2 - коэффициенты передачи тяговых лебедок 11 и 12 соответственно; - оператор дифференцирования. В блоке 53 косвенного измерения возмущающих воздействий формируются сигналы fi, h эквивалентных возмущающих воздействий соответственно на верхнюю и ниж- 5 нюю ветви каната. На входы этого устройства подаются сигналы FI, р2 натяжений соответственно верхней и нижней ветвей каната и сигналы Vi, Vz скоростей перемещения, соответствующих ветвей каната. После преобразований сигналов в устрой- 0 стве на его выходе получаются сигналы fi, (2 эквивалентных возмущающих воздействий соответственно на верхнюю и нижнюю ветви каната, равные
5f, V, + |,F,;
I р
f2 V2 + .,,
где Ту, TS, Tg - постоянные времени системы 30передачи грузов (определяется геометрией ветвей каната) Кз, К4 - коэффициенты системы передачи грузов (определяются геометрией ветвей каната). Блок 39 компенсации возмущающих 35 воздействий формирует управляющие сигналы Ui, 1)2, Us, U4, компенсирующие возмущение воздействия с использованием инвариантных принципов. На входы этого устройства подаются сигналы f|, f2 эквивалент- 4Q ных возмущающих воздействий. В результате преобразований сигналов в устройстве на его выходе получаются управляющие сигналы Ui, U2, Us, U4, равные
U, (T,P+Ki) fi; Us(T4P+K2) f2;
U2 Ksfi;
где Кб, Кб - коэффициенты системы передачи грузов (определяются геометрией ветвей каната). При нахождении грузовой тележки в зоне передающего судна и действии внещних воз- CQ мущений управляющие сигналы Ui, Us с выхода блока 39 компенсации возмущающих воздействий поступают на блоки 27 и 28 регулирования токов возбуждения и изменяют токи возбуждения электродвигателей 15 и 16 таким образом, что компенсируют из- 55 менение скорости перемещения грузовой тележки относительно передающего судна. Так, например, если принимающее судно 2 качнулось вправо, то в результате дей45
ствия устройства косвенного измерения и компенсации возмущающих воздействий ток возбуждения электродвигателя 15 уменьшится, что приведет к уменьщению скорости перемещения верхней ветви каната и к увеличе- нию длины петли каната (расстояние между точками подвеса увеличится). В то же время ток возбуждения электродвигателя 16 увеличится, а значит увеличится его тормозной момент и натяжение нижней ветви каната. В результате скорость этой ветви каната и грузовой тележки останется неизменной.
Аналогично отрабатывается отклонение принимающего судна влево и совместная качка обоих судов. Таким образом грузовая тележка 6 осуществляет слежение за мач- той 3 передающего судна 1.
При входе грузовой тележки в зону принимающего судна контакты 33 и 34 переключателя режимов работы устанавливаются в положение П. В контур регулирования натяжения включаются блоки 41 и 44 регули- рования натяжения каната, а блок4и регулирования натяжения отключается. В контуре регулирования скорости работают блок 48 регулирования скорости перемещения тележки, инвертор 49 и усилители 50 и 51. Блок 47 регулирования скоро сти перемещения тележки и инвертор 43 отключаются. В этом случае устройство косвенного измерения и компенсации возмущающих воздействий работает следующим образом.
Допустим, принимающее судно качнулось вправо. На выходе блока 39 компенсации возмущающих воздействий появляются управляющие сигналы Ui, U2, Us, U4. В результате совместного действия сигналов Ui, 1)2 и сигналов Us, U4 токи возбуждения электродвигателей 15 и 16 уменьшаются, а значит уменьщается вращающий момент электродвигателя 15 и тормозной момент электродвигателя 16. Это приводит к уменьщению натяжения и скорости перемещения верхней ветви каната, а также - к уменьшению натяжения и уватичению скорости перемещения нижней ветви каната. Скорость перемещения грузовой тележки относительно принимающего судна остается неизменной.
Аналогично отрабатывается отклонение принимающего судна влево и совместная качка обоих судов. Таким образом, грузовая тележка осуществляет слежение за мачтш принимающего судна.
При нахождении грузовой тележки в зоне передающего судна электродвигатель 15 имеет мягкие механические характеристики (прямые А, AI и т. д. на фиг. 3), а электродвигатель 16 имеет жесткие механические характеристики (прямые Б, 5i и т. д. на фиг. 3) . При нахождении грузовой тележки в зоне принимающего судна электродвигатели 15 и 16 имеют мягкие механические ха- рактеристики (соответственно, прямые А, А и т. д. и Б, Б й т. д. на фиг. 4). В установивщем
5
0 5
О 5
5
0 5
0
ся режиме точка совместной работы электродвигателей определяется пересечением механических характеристик двигательного и тормозного (генераторного) режимов.
Переключение режимов работы системы передачи грузов целесообразно производить при нахождении грузовой тетежки в середине пролета.
Формула изобретения
I. Система передачи грузов между судами в море, содержащая ветви каната, заведенные на две тяговые лебедки, соответственно связанные с электрически соединенными между собой первым и вторым электродвигателями постоянного тока, имеющими обмотки возбуждения, тележку, подвижно установленную на одной из ветвей каната и жестко связанную с другой ветвью этого каната, а также электронный узел управления режимом работы электродвигателей, включающий в себя задатчики сигналов натяжения каната и сигналов перемещения тележки, блоки регулирования скорости перемещения тележки, устройство компенсации возмущающих воздействий, инвертор, усилитель и три электрические цепи, первая из которых связана с якорями обоих электродвигателей и включает в себя задатчик тока, выход которого связан с одним из входов блока регулирования тока, выход которого связан с входом тиристорного преобразователя, первый выход которого соединен с датчиком тока, связанным с первым электродвигателем, а второй выход с вторым электродвигателем, причем выход датчика тока подключен к второму входу упомянутого блока регулирования тока, а каждая из второй и третьей электрических цепей включает в себя датчики скорости перемещения и натяжения каната, кинематически связанные с соответствующими ветвями по- cлeднeгo блок регулирования натяжения каната, один из входов которого связан с выходом датчика натяжения каната, а также тиристорный преобразователь тока возбуждения, связанный одним из своих выходов с одним из концов соответствующей обмотки возбуждения, при этом выход задатчи- ка сигнала натяжения каната связан с вторыми входами упомянутых блоков регулирования натяжения каната, выход задатчика сигнала перемещения татежки связан с одним из входов первого блока регулирования скорости перемещения тележки, выход которого соединен с третьим входом блока регулирования натяжения каната второй электрической цепи, а выход усилителя связан с первым входом второго блока регулирования скорости перемещения тележки, отличающаяся тем, что, с целью повышения надежности системы, электронный узел управления режимом работы электродвигатетен
выполнен с двумя датчиками и блоками регулирования тока возбуждения, четырьмя сумматорами, вторыми нормально замкнутыми и нормально разомкнутыми контактами, инвертором, усилителем и третьим блоком регулирования натяжения, а устройство компенсации возмущающих воздействий включает в себя два блока косвенного измерения скорости перемещения ветвей каната, блок косвенного измерения возмущающих воздействий и блок компенсации возмущающих воздействий, при этом второй выход каждого тиристорного преобразователя тока возбуждения соединен с соответствующим датчиком тока возбуждения, связанным с вторым концом соответствующей обмотки возбуждения, выходы этих преобразователей связаны с выходами соответствующих блоков регулирования токов возбуждения, причем выход каждого из датчиков тока возбуждения соединен с одним из входов соответствующих блоков регулирования токов возбуждения и блоков косвенного измерения скорости перемещения ветвей каната, при этом вторые входы последних соединены с соответствующими датчиками скорости перемещения каната, выход одного из упомянутых блоков косвенного измерения скорости перемещения ветвей каната соединен с первым входом блока косвенного измерения возмущающего воздействия и с входом первого усилителя, а выход второго из упомянутых блоков косвенного измерения скорости перемещения ветвей каната соединен с вторым входом первого блока регулирования скорости перемещения тележки и через второй усилитель - с вторым входом второго блока регулирования скорости перемещения тележки, третий вход которого связан с выходом задатчика скорости перемещения тележки, второй и третий входы блока косвенного измерения возмущающих воздействий связаны с датчиками натяжения ветвей каната соответственно второй и третьей электрических цепей, а первый и второй выходы этого блока соединены соответственно с первым,: вторым входами блока компенсации возмущающего воздействия, первый выход которого соединен с первыми входами первого и второго сумматоров, второй выход соединен с вторым входом второго сумматора, третий выход соединен с первыми входами третьего и четвертого сумматоров, а четвертый выход соедин ен с вторым входом четвертого сумматора, при этом второй вход первого сумматора соединен с выходом блока регулирования натяжения каната второй электрической цепи, а выход соединен через первый нормально разомкнутый контакт с вторым входом блока регулирования тока возбуждения второй электрической цепи, третий вход второго сумматора связан с выходом третьего блока регулирования натяжения каната, второй вход третьего
сумматора соединен с выходом задатчика натяжения каната, его третий вход соединен через первый инвертор с выходом первого .блока регулирования скорости перемещения
тележки, а выход связан через второй нормально разомкнутый контакт с вторым входом блока регулирования тока возбуждения третьей электрической цепи, третий вход четвертого сумматора соединен с выходом блока регулирования натяжения каната
третьей электрической цепи, третий вход которого связан через второй инвертор с выходом второго блока регулирования скорости тележки, а выход соединен через второй нормально замкнутый контакт с вторым входом блока регулирования тока возбуждения этой электрической цепи, при этом третий блок регулирования натяжения каната соединен первым входом с выходом датчика натяжения каната второй электрической цепи, вторым входом - с выходом задатчика
сигналов натяжения ветвей каната, а третьим - с выходом второго блока регулирования скорости тележки.
2. Система по п. 1, отличающаяся тем, что каждый блок косвенного измерения скорости перемещения ветвей каната выполнен с пропорционально-дифференциальным операционным усилителем, дифференцирующим усилителем и двумя сумматорами, причем один из входов первого сумматора соединен с входом пропорционально-дифференциального операционного усилителя, выход которого связан с первым входом второго сумматора, вход дифференцирующего усилителя связан с выходом второго сумматора, а выход - с вторым входом первого сумматора, при этом второй вход второго сум-матора и вход пропорционально-дифференциального усилителя образуют соответственно первый и второй входы блока косвенного измерения скорости перемещения ветвей каната, а его выход образует выход первого сумматора.
3. Система по пп. 1 и 2, отличающаясятем, что блок косвенного измерения возмущающих воздействий содержит три интегрирующих операционных усилителя, пропорциональный операционный усилитель и два сумматора, причем входы первого и второго интегрирующих операционных усилителей соединены между собой, выход первого из этих усилителей связан с первым входом первого сумматора, выход второго из этих усилителей бвязан с первым входом второго сумматора, связанного вторым входом с третьим интегрирующим операционным усилителем, а третьим входом - с входом пропорционального операционного усилителя, выход которого соединен с вторым входом первого сумматора, при этом третий вход первого
сумматора, вход пропорционального операционного усилителя, вход первого и вход третьего интегрирующих усилителей образуЮТ соответственно первый, второй, третий и четвертый входы блока косвенного измерения возмущающих воздействий, а его первый и второй выходы образуют соответственно выходы первого и второго сумматоров.
4. Система по по. 1-3, отличающаяся тем, что блок компенсации возмущающих воздействий выполнен с двумя пропорционально-дифференциальными операционными усилителями и двумя пропорциональными усилителями, при этом вход первого пропорционального усилителя соединен с входом первого пропорционально-дифференциально
го операционного усилителя, а вход второго пропорционального усилителя связан с входом второго пропорционально-дифференциального усилителя, причем входы первого и второго пропорциональных операционных усилителей образуют соответственно первый и второй входы блока компенсации возмущающего воздействия, а его первый, второй,третий и четвертый выходы образуют соответственно выходы первого пропорционально-дифференциального, первого пропорционального, второго пропорционально-дифференциального и второго пропорционального операционных усилителей.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для передачи грузов между судами в море в условиях качки | 1980 |
|
SU893700A1 |
| Система передачи грузов между судами в море в условиях качки | 1982 |
|
SU1013342A1 |
| Устройство для передачи грузов между судами в море в условиях качки | 1982 |
|
SU1057368A1 |
| Устройство для передачи грузов между судами в море в условиях качки | 1981 |
|
SU958217A1 |
| Устройство для передачи грузов между судами в море в условиях качки | 1982 |
|
SU1049342A1 |
| Устройство для передачи грузов между судами в море в условиях качки | 1981 |
|
SU969584A1 |
| Устройство для передачи грузов между судами в море в условиях качки | 1988 |
|
SU1601020A1 |
| Устройство для передачи грузов между судами в море в условиях качки | 1986 |
|
SU1357307A1 |
| Устройство для управления электроприводом шахтной подъемной машины | 1986 |
|
SU1388377A1 |
| Устройство для управления электроприводом крановой тележки с грузом на гибком подвесе | 1987 |
|
SU1572986A1 |
Изобретение относится к судостроению, в частности к системам для передачи грузов между судами в море в условиях качки. Цель изобретения - повышение надежности системы. Система передачи грузов между судами в море содержит мачты 3, 4, установленные соответственно на передающем и принимающем судах 1, 2, канат 5 с тележкой 6, огибающий блок 8 мачты 4 и закрепленный своими концами на лебедках 11, 12, размещенных на передающем судне 1, а также электронный узел управления режимом работы электродвигаталей этих лебедок с устройством компенсации возмущающих воздействий, который состоит из двух блоков косвенного измерения скорости перемещения ветвей каната 5, блока косвенного измерения возмущающих воздействий и блока компенсации возмущающих воздействий. При передаче груза осуществляется отслеживание положения в пространстве как мачт 3 передающего судна, так и мачты 4 принимающего судна. 3 з.п. ф-лы, 5 ил.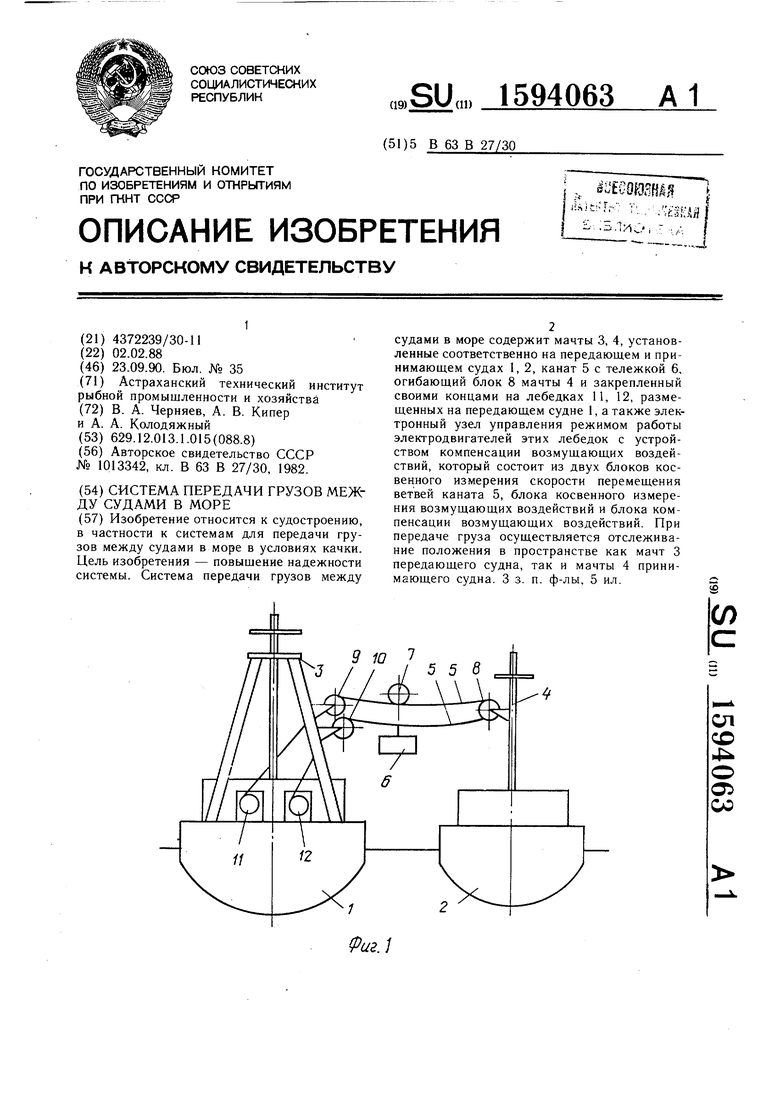
Vфиг.З .11 A
Fz
61
3
61
U
| Система передачи грузов между судами в море в условиях качки | 1982 |
|
SU1013342A1 |
| Способ приготовления сернистого красителя защитного цвета | 1915 |
|
SU63A1 |
