tsD
СП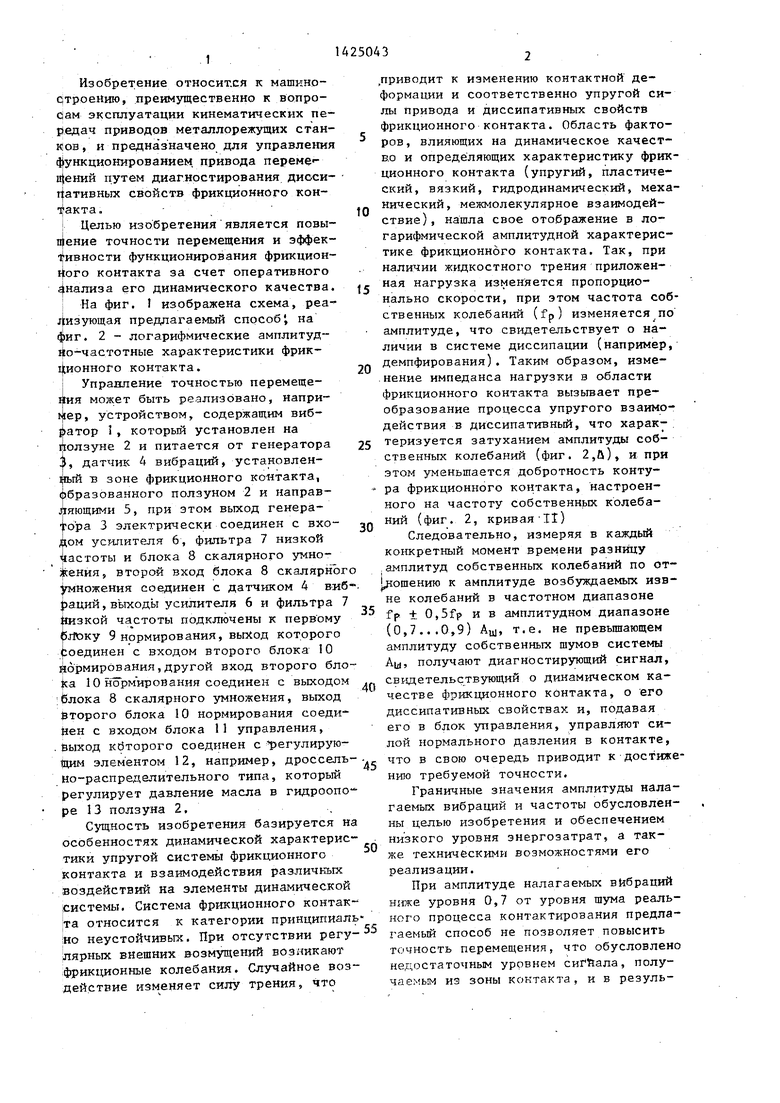

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ запрессовки деталей | 1989 |
|
SU1731572A1 |
| ДИНАМИЧЕСКИЙ МОНИТОРИНГ МОБИЛЬНЫХ НЕЛИНЕЙНЫХ ТЕХНИЧЕСКИХ СИСТЕМ | 2020 |
|
RU2745984C1 |
| СПОСОБ ДИНАМИЧЕСКОГО МОНИТОРИНГА ВЫСОКОМОБИЛЬНЫХ НЕЛИНЕЙНЫХ ТЕХНИЧЕСКИХ СИСТЕМ | 2020 |
|
RU2745382C1 |
| ДИНАМИЧЕСКИЙ МОНИТОРИНГ УЗЛОВ ТРЕНИЯ МОБИЛЬНЫХ ТЕХНИЧЕСКИХ СИСТЕМ | 2020 |
|
RU2748933C1 |
| СПОСОБ ВОЗБУЖДЕНИЯ ВИБРАЦИОННЫХ КОЛЕБАНИЙ ДЛЯ ПРОВЕДЕНИЯ СЕЙСМИЧЕСКОЙ РАЗВЕДКИ И ДЕБАЛАНСНЫЙ ВИБРОВОЗБУДИТЕЛЬ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2387488C1 |
| Способ определения упруго-диссипативных характеристик древесины | 2019 |
|
RU2715222C1 |
| СПОСОБ ДИНАМИЧЕСКОГО МОНИТОРИНГА ФРИКЦИОННЫХ МОБИЛЬНЫХ СИСТЕМ | 2012 |
|
RU2517946C2 |
| СПОСОБ ДИНАМИЧЕСКИХ ИСПЫТАНИЙ ДЕФОРМИРУЕМЫХ ЭЛЕМЕНТОВ | 1991 |
|
RU2085890C1 |
| СПОСОБ ИСПЫТАНИЙ УЗЛОВ ТРЕНИЯ | 2006 |
|
RU2343450C2 |
| Способ определения параметров собственных тонов колебаний конструкций в резонансных испытаниях | 2017 |
|
RU2658125C1 |
Изобретение касается машиностроения, преимущественно эксплуатации кинематических передач приводов металлорежущих станков. Цель изобретения - повьшение точности пере- мешения функционирования фрикционного контакта за счет оперативно- ного анализа его динамического качества. Для этого проводят анализ в реальном масштабе времени величин амплитуд собственных колебаний системы, возбуждаемых в упругой системе фрикционного контакта, как наиболее полно характеризующих дисси- пативные свойства фрикционного контакта. По изменению диагностирующего сигнала управляют величиной сильг нормального давления во фрикционном контакте. 2 ил. 1 табл.
со
Изобретение относит.ся к машнно- ртроеииго, преимущественно к вопро- 0ам эксплуатации кинематических передач приводов металлорежущих станков, и предназначено для управления функционированием, привода переме-- путем диагностирования дисси- т ативных свойств фрикционного кон- акта.
Цепью изобретения является повы- 11|ение точности перемещения и эффек- т ивности функционирования фрикцион- rioro контакта за счет оперативного нализа его динамического качества. j На фиг. изображена схема, pea- изующая предлагаемый способ , на фиг. 2 - логарифмические амплитуд- i|io-4acTOTHbie характеристики фрик- ijtHOHHOfo контакта. I Упранление точностью перемеще- 1Гия может быть реализовано, например, устройством, содержащим вибратор 1, который установлен на ползуне 2 и питается от генератора Л, датчик 4 вибраций, установлен- 1гьгй в зоне фрикционного контакта, образованного ползуном 2 и направляющими 5, при этом выход генератора 3 электрически соединен с входом усилителя 6, фильтра 7 низкой частоты и блока 8 скалярного умно- ;| сения, второй вход блока 8 скалярного умножения соединен с датчиком 4 виб )аций, в ыходы усилителя 6 и фильтра 7 йизкой ча стоты подключены к первому prttoKy 9 нормирования, выход которого |;оединен с входом второго блока 10 йормирования,другой вход второго бло- |са 10 нсГрмирования соединен с выходом ;блока В скалярного умножения, выход второго блока 10 нормирования соединен с входом блока 11 управления, йыход кбторого соединен с регулирующим элементом 12, например, дроссель- Но-распределительного типа, который регулирует давление масла в гидроопо ре 13 ползуна 2.
Сущность изобретения базируется на особенностях динамической характеристики упругой системы фрикционного контакта и взаимодействия различных воздействий на элементы динамической |системы. Система фрикционного контак- |та относится к категории принципиаль 1но неустойчивых. При отсутствии регулярных внешних возмущений возникают ;фрикционные колебания. Случайное воздействие изм еняет силу трения, что
5
0
5
0
5
0
5
0
5
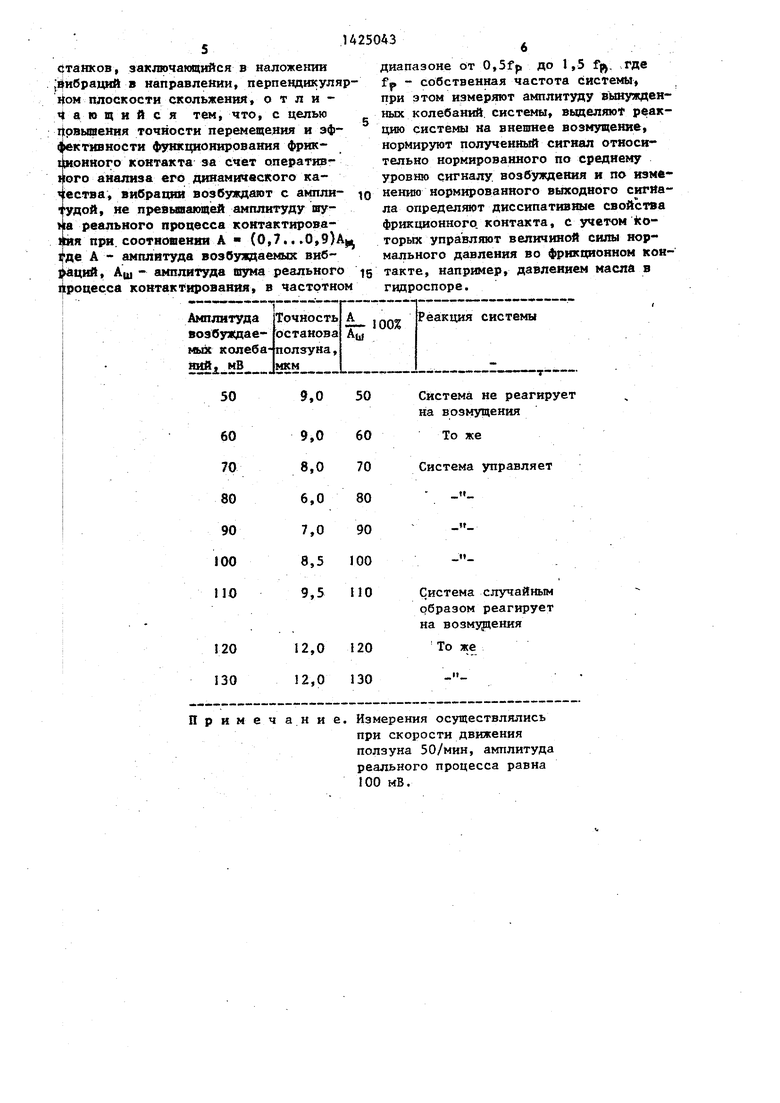
.приводит к изменению контактной деформации и соответственно упругой силы привода и диссипативных свойств фрикционного контакта. Область факторов, влияющих на динамическое качест- В.О и определяющих характеристику фрикционного контакта (упругий, пластический, вязкий, гидродинамический, механический, межмолекулярное взаимодействие), нашла свое отображение в логарифмической амплитудной характеристике фрикционного контакта. Так, при наличии жидкостного трения приложенная нагрузка изменяется пропорционально скорости, при этом частота собственных колебаний (fp) изменяется по амплитуде, что свидетельствует о наличии в системе диссипации (например, демпфирования). Таким образом, изме- .нение импеданса нагрузки в области Фрикционного контакта вызьшает преобразование процесса упругого взаимодействия в диссипативный, что характеризуется затуханием амплитуды собственных колебаний (фиг. 2,и), и при этом уменьшается добротность контура фрикционного контакта, настроенного на частоту собственньк колебаний (фиг. 2, кривая 11)
Следовательно, измеряя в каждый конкретный момент времени разницу амплитуд собственных колебаний по от- 1дадшению к амплитуде возбуждаемых извне колебаний в частотном диапазоне fp ± 0,5fp и в амплитудном диапазоне (о,7...О,9) Ащ, т.е. не превьшающем амплитуду собственных шумов системы Ац1, получают диагностирующий сигнал, свидетельствующий о динамическом качестве фрикционного контакта, о его диссипативных свойствах и, подавая его в блок управления, управляют силой нормального давления в контакте, что в свою очередь приводит к-достижению требуемой точности.
Граничные значения амплитуды налагаемых вибраций и частоты обусловлен- ны целью изобретения и обеспечением низкого уровня энергозатрат, а также TexHi-гческими возможностями его реализации.
При амплитуде налагаемых вибраций нлже уровня 0,7 от уровня шума реального процесса контактирования предлагаемый способ не позволяет повысить точность перемещения, что обусловлено недостаточным уровнем сигйала, получаемым из зоны контакта, и в результате этого отсутствием реагирования системы..
Увеличение амплитуды более уровня 0,9 от уровня шума ведет к увеличению энергозатрат при реализации способа и не позволяет повысить точность, так как в этом случае имеет место реагирование системы случайным образом.
Предлагаемый частотный диапазон обусловлен динамически активным частотным диапазоном собственных колебаний упругой системы фрикционного .контакта.
Сужение предлагаемого частотного диапазона ведет к необходимости весьма точного экспериментального определения собственной частоты колебаний каждого фрикционного контакта (в упругой системе того или иного объекта), а расширение диапазона нецелесообразно вследствие увеличения времени, требуемого для сканирования в этом частотном диапазоне, и, в конечном счете, снижения эффективности способа.
Управление точностью перемещения заключается в следующем,
Измеряют собственную частоту fp и амплитуду шума Ащ динамической системы фрикционного контакта.
В зоне фрикционного контакта между ползуном 2 и направляющими 5 воз- буткдают вибратором , который питают Например, от генератора 3 качающейся частоты, колебания в частотном диапазоне ,5fp при амплитуде (0,7. 0,9) Ащ.
Измеряют сигнал А с выхода датчик вибраций 4, например, пьезоэлектрического типа, установленного в зоне фрикционного контакта, и подают на вход блока 8 скалярного умножения.
Измеряют сигнал В, характеризующий колебания, возбуждаемые вибратором I в зоне фрикционного контакта, подают его также на другой вход блока 8 скалярного умножения.
В блоке 8 осзпдествляют операцию скалярного умножения, посредством чего выделяют сигнал С как реак цию фрикционного контакта на внешнее возбуждение, обусловленное функционированием вибратора 1.
Нормируют сигнал В по среднему уровню в первом блоке 9 нормирования, предварительно усилив его в усилителе 6 с регулируемым коэффициен
5
0
том усиле шя и вьщелив средний уровень сигнала В в фильтре 7 низкой частоты.
Далее осуществляют операцию нормирования сигнала С, характеризующего реакцию фрикционного контакта на внешнее возбуждение, по отношению к нормированному по среднему уровню сигналу В во втором блоке 10 нормирования, на входы которого подают указанные сигналы.
Посредством второй операции нормирования в блоке 20 вьщеляют сиг- 5 нал D, характеризующий динамическое качество и диссипативные свойства фрикционного контакта в реальном масштабе времени.
По изменению диагностирующего сигнала D диагностируют диссипативные свойства фрикционного контакта и управляют величиной силы нормального давления во фрикционном контакте между ползуном 2 и направляющими 5, подавая сигнал D в блок 11 управления, и. -посредством входного сигнала из блока 11 управляют регулирующим элементом 12, например давлением масла в гидроопоре 3 фриКцион- него контакта, таким образом, что изменение сигнала D обуславливает соответствующее изменение давления масла в гидроопоре J3.
П р и м е р. С целью повышения точности перемещения по предлагаемому способу ползуна токарного станка УТ16ФЗ с ЧПУ типа Луч-21 и модернизированным устройством подачи масла в гидроопоры ползуна использована установка, содержащая следующие блоки: стойка управления вибратором СУПВ-0,1А, вибратор типа ВЭД-10, акселерометр типа ИС-318,усилитель, фильтр низкой частоты блок скалярного умножения, а также блоки нормирования, вьшолненные в качает- ве делителей.
Сканирование в частотном диапазоне ff ±0,5fp осуществлялось вручную.
Точность останова измерялась ивди., катором часового типа йЧ-5.
В таблице показано влияние амплитуды возбуждаемых вибраций на точ- ность перемещения.
5 Формула изобретения
Способ управления точностью перемещения преимущественно в подвижных элементах приводов металлорежущих
5
0
5
0
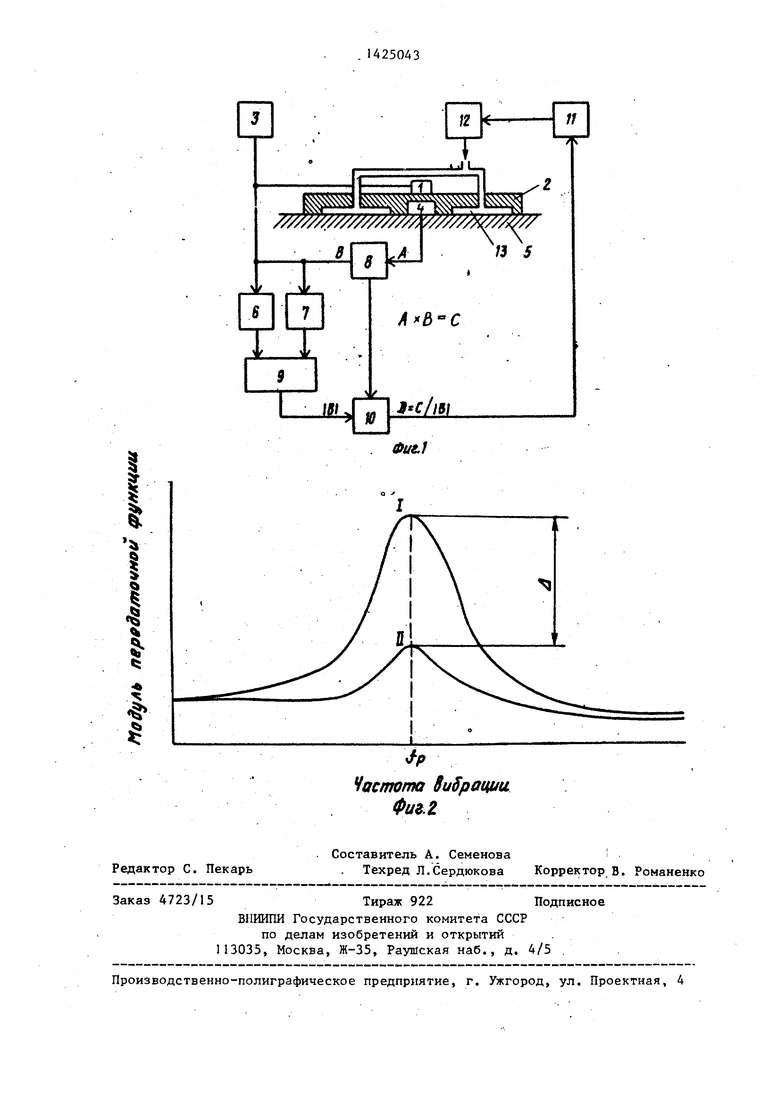
{ танков, заключающийся в наложении |Е|ибраций в направлении, перпендихуляр- плоскости скольжения, о т л и - Ц а ю щ и и с я тем, что, с целью г:рвыюения точности перемещения и эф- 4ieKTKBHocTH функционирования фрик- Iдонного контакта за счет оператот- } foro анализа его динамического ка lecTBa, вибрации возбуждают с ампли- гудой, не превышающей амплнтуду шу- ta реального процесса контактирования при. соотношении А (0,7...)А где А - амплитуда возбуждаемых виб- аций, АШ - амплитуда шума реального процесса контактирования, в частотном
9,0 50 9,0 60
8,0 6,0 7,0 8,5
70
80
90
100
9,5 ПО
12,0 120 12,0 130
Примечание,
диапазоне от 0,5fp до 1,5 fp. где fp - собственная частота системы, при этом измеряют амплитуду вынужденных колебаний, системы выделяют реакцию системы на внешнее возмущение, нормируют полученный сигнал относительно нормированного по среднему уровню сигналу, возбуждения и по изменению нормированного выходного сигнала определяют диссипативные свойства фрикционного, контакта, с учетом со- торых управляют величиной силы нормального давления во фрикционном контакте, например, давлеиием масла в гидроспоре.
система не реагирует на возмущения
То же
Система управляет -
Система случайным образом реагирует на BOSMj emiH
То же ||
Измерения осуществлялись при скорости движения ползуна 50/Мнн, амплитуда реального процесса равна 100 мВ.
V
Р
Частота SuSpamiu Фие.г
| Пуш В.Э« Малые перемещения в станках.- Машгиэ, 1961. |
