cmftMi
Изобретение относится к области регулируемого электропривода ротор- н|эго экскаватора, содержащего одновременно работающие приводы по уело- вИям технологии работы экскаватора.
Целью изобретения является снижение металлоемкости экскаватора и установленной мощности синхронного дзигателя за счет замены двигателей П1ЭСТОЯННОГО тока в приводе роторной стрелы на асинхронные двигатели с фазным, ротором,
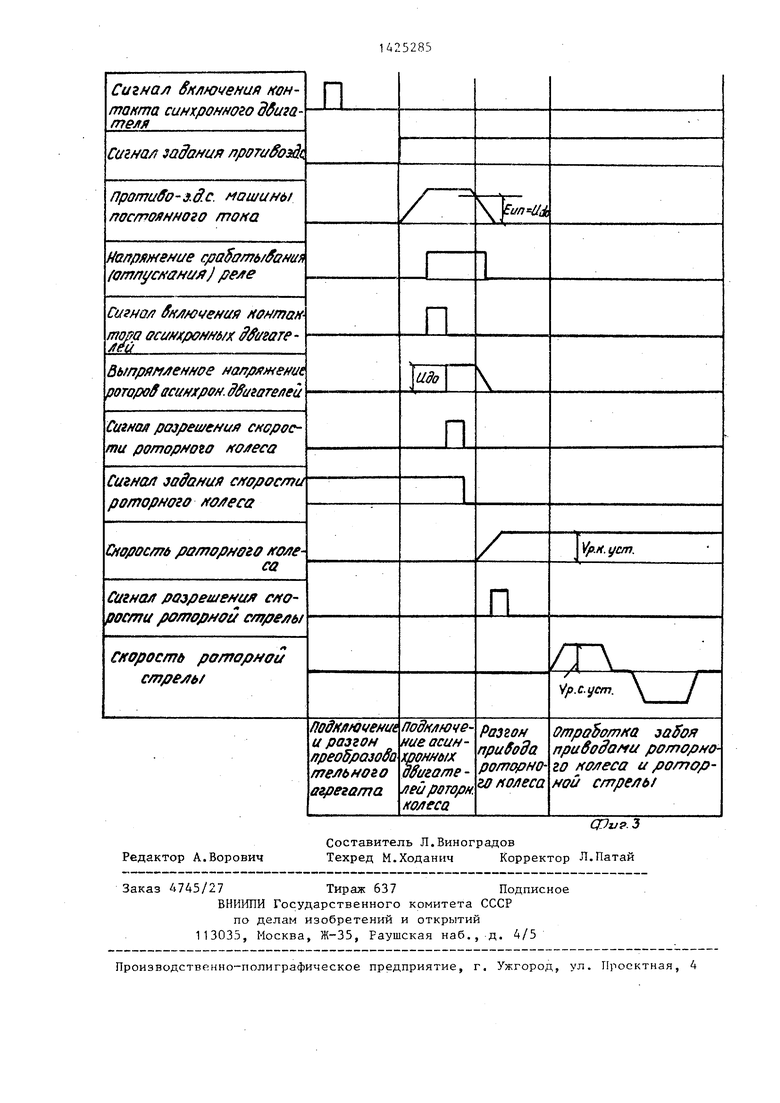
i На,фиг. 1 представлена схема элек тоопривода роторного экскаватора; Н1 фиг. 2 - принципиальная схема блоков управления poTopiHoA стрелой и| роторным колесом; на фиг. 3 - диа- rjsaMMa работы электропривода ротор- HJDro экскаватора, который содержит дза регулируемых привода, одновре- М2ННО работающих по условиям техноло rW отработки забоя роторным экскава
трром.
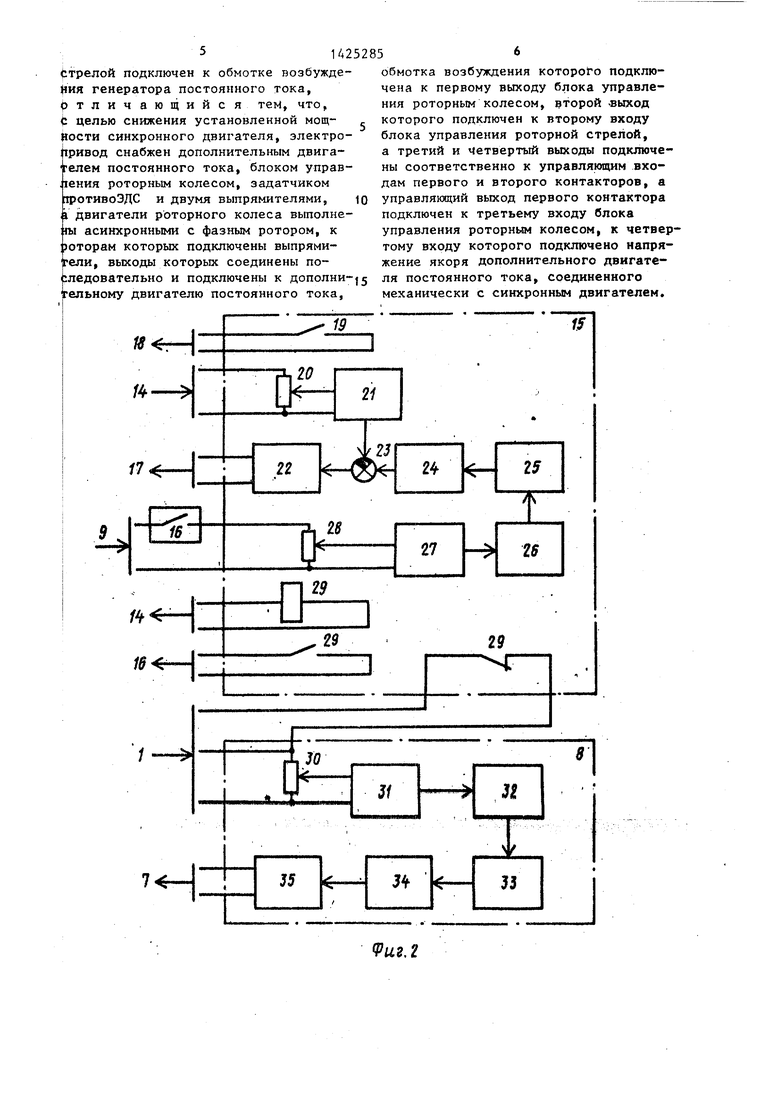
Привод роторной стрелы 1 состоит из двигателей 2 и 3, приводного синхронного двигателя 4, генератора 5, расположенных на поворотной платформа 6, обмотка возбуждения 7 генера- трра подключе-на к блоку 8 управления ррторной стрелой. Привод роторного крлеса 9 состоит из двух асинхронных дригателей с фазным ротором 10 и 11, выпрямители 12 и 13, которые по цепи переменного тока подключены к рото- двигателей 10 и 11, а по цепи простоянного тока соединены с машиной 14 постоянного тока, которая механически соединена с генератором 5 привода поворота роторной стрелы 1 и синхронным двигателем 4, мощность которого равна большей из требуемых: мощности привода роторной стрелы 1 И1пи мощности скольжения асинхронных двигателей 10 и 11 привода роторного колеса 9. Скорость роторного колеса 9 регулируется блоком управления 15, один из входов которого соединен с якорем машины 14 постоянного тока, а второй - с контактором 16 асинхрон нЫх двигателей 10 и 11. Один из выходов блока 15 управления роторным колесом соединен с обмоткой 17 воз- б уждения двигателя 14 постоянного тока, второй - с контактором 18 син- xipoHHoro двигателя 4, третий - с контактором 16 асинхронных двигателей 10 и 11, а четвертый - с блоком управления роторной стрелой.
0
5
0
5
0
Q
Влок 15 управления роторным колесом содержит коммутационный аппарат 19, включенный в цепь контактора 18, резистор 20 задания противо-ЭДС маиш- ны постоянного тока, задатчик 21 интенсивности и тиристорный возбудитель 22, выход которого подключен к обмотке 17 возбуждения машины 14 постоянного тока асинхронного машинно-вентильного каскада. На вход тири- сторного возбудителя 22 через узел 32 сравнения подключены регулятор 24 тока, регулятор 25 скорости, за- 5 датчик 26 интенсивности, фазовыпрями- тельноб устройство 27, резистор 28 задания скорости роторного колеса, на который через блок-контакт контактора 16 подается задание скорости ротора. Устройство 15 содержит реле 29 напряжения, подключенное к якорю машины 14 постоянного тока, один контакт которого включен в цепь включения контактора 16, а второй - в цепь задания скорости, регулируемой резистором JU. Ьлок 8 управления . роторной стрелой, содержащего фазо- выпрямительное устройство 31, задатчик 32 интенсивности поворота, регулятор 33 скорости, регулятор 34 тока, тиристорный возбудитель 35, выход которого подключен к обмотке 7 возбуждения генератора привода роторной стрелы.
Электропривод работает следующим образом.
Коммутационным аппаратом 19 замыкается цепь включения контактора 18 и синхронный двигатель 4 подключается к сети, Синхронньй двигатель 4 разгоняется до синхронной скорости. Затем вхолостую, т.е. когда роторное колесо 9 выведено из забоя, производится запуск привода роторного колеса. Сигнал задания противо-ЭДС машины 14 постоянного тока асинхронного .машинно-вентильного каскада через резистор 20 подается на задатчик 21 интенсивности возбуждения, с выхода которого линейно нарастающее напряжение подается на тиристорный возбудитель 22. Машина 14 постоянного тока возбуждается и ее напряжение Е,
5
5
.,(1 возрастает до величины, несколько превьш1ающей выпрямленное напряжение Ujp на роторных обмотках асинхронных двигателей при заторможенных асин-, хронных двигателях 10 и 11. При этой величине Ед срабатьшает реле 29 напряжения и своим замыкающимся контактом замыкает цепь включения контактора 16, который подключает асинхронные двигатели 10 и 11 к сети переменного тока. Так как Е U , то в этом случае ток в цепи постоянного тока асинхронного машинно-вентильного каскада равен нулю, двигатели неподвижны и электропривод готов к пуску.,.
Контактор 16 своим блок-контактом замыкает цепь задания скорости роторного колеса и на вход резистора 28 подается сигнал с сельсинного коман- доаппарата скорости роторного колеса, который, преобразуясь в фазовьтрями- тельном устройстве 27 в постоянное напряжение, поступает на вход задатчереэ синхронный двигатель в сеть. Генератор 5 привода роторной стрелы работает в длительном генераторном режиме, потребляя энергию из сети через синхронный двигатель 4. Таким образом, в рабочем режиме резания потоки энергии двух приводов, про- ходяпще через синхронный двигатель
10 4, при одновременной работе направлены встре но, поэтому мощность синхронного двигателя в рабочем режиме определяется как разность мощностей привода роторной стрелы и мощность
15 скольжения асинхронных двигателей привода роторного колеса.
В процессе работы роторного экскаватора возможны ремонтные режимы, при которых каждый привод работает
чика 26 интенсивности и через регуляг 20 отдельно, без нагрузки. В этих режичереэ синхронный двигатель в сеть. Генератор 5 привода роторной стрелы работает в длительном генераторном режиме, потребляя энергию из сети через синхронный двигатель 4. Таким образом, в рабочем режиме резания потоки энергии двух приводов, про- ходяпще через синхронный двигатель
4, при одновременной работе направлены встре но, поэтому мощность синхронного двигателя в рабочем режиме определяется как разность мощностей привода роторной стрелы и мощность
скольжения асинхронных двигателей привода роторного колеса.
В процессе работы роторного экскаватора возможны ремонтные режимы, при которых каждый привод работает
| название | год | авторы | номер документа |
|---|---|---|---|
| Машинно-вентильный каскад | 1977 |
|
SU731546A1 |
| ЭЛЕКТРИЧЕСКАЯ ПЕРЕДАЧА НА ПЕРЕМЕННОМ TOI^E | 1971 |
|
SU319508A1 |
| Электропривод роторного экскаватора | 1989 |
|
SU1710675A1 |
| Электрическая передача переменного тока тягового транспортного средства с микропроцессорной системой управления | 2019 |
|
RU2729767C1 |
| ЭЛЕКТРИЧЕСКАЯ ПЕРЕДАЧА МОЩНОСТИ ПЕРЕМЕННОГО ТОКА ТЯГОВОГО ТРАНСПОРТНОГО СРЕДСТВА | 2002 |
|
RU2225301C2 |
| ЭЛЕКТРИЧЕСКАЯ ПЕРЕДАЧА МОЩНОСТИ ПЕРЕМЕННОГО ТОКА ТЯГОВОГО ТРАНСПОРТНОГО СРЕДСТВА | 2003 |
|
RU2252150C2 |
| СИСТЕМА РЕГУЛИРОВАНИЯ ДАВЛЕНИЯ В ПНЕВМАТИЧЕСКОЙ СИСТЕМЕ ТЯГОВОГО ТРАНСПОРТНОГО СРЕДСТВА | 2003 |
|
RU2254249C2 |
| ЭЛЕКТРИЧЕСКАЯ ПЕРЕДАЧА МОЩНОСТИ ПЕРЕМЕННОГО ТОКА ТЯГОВОГО ТРАНСПОРТНОГО СРЕДСТВА | 2005 |
|
RU2283247C1 |
| ЭЛЕКТРИЧЕСКАЯ ПЕРЕДАЧА МОЩНОСТИ ТЯГОВОГО ТРАНСПОРТНОГО СРЕДСТВА | 2005 |
|
RU2297090C1 |
| ЭЛЕКТРИЧЕСКАЯ ПЕРЕДАЧА МОЩНОСТИ ТЯГОВОГО ТРАНСПОРТНОГО СРЕДСТВА | 2002 |
|
RU2207701C1 |
Изобретение относится к регулируемому электроприводу роторного экскаватора, содержащего одновременно работающие приводы по условиям технологии работы экскаватора. Цель изобретения - снижение установленной мощности синхронного двигателя (Д) 4. Дпя этого электропривод снабжен дополнительным Д 14 постоянного тока, блоком управления (БУ) 15, роторным колесом (РК) 9, задатчиком противо- ЭДС и выпрямителями 12 и 13. Последние по цепи переменного тока подключены к фазным роторам.Д 10 и 11 привода РК 9, а по цепи постоянного тока - Д 14, который механически соединен с генератором 5 привода поворота роторной стрелы 1 и синхронным Д 4. Скорость РК 9 регулируется БУ 5, первый вход которого соединен с якорем Д 14, а второй - с контактором 16 асинхронных Д 10 и 11. Выходы ЕУ 15 соединены с обмоткой 17 возбуждения Д 14, контактором 18 синхронного Д 4, Р контактором 16 асинхронных Д 10 и 11 и ЕУ 8 роторной стрелой 1. В рабочем режиме резания потоки энергии двух приводов, проходящие через Д 4 при . одновременной работе направлены встречно. Мощность Д 4 в рабочем режиме определяется разностью мощности привода роторной стрелы и мощности скольжения Д 10 и 11. 3 ил. ь SS (/)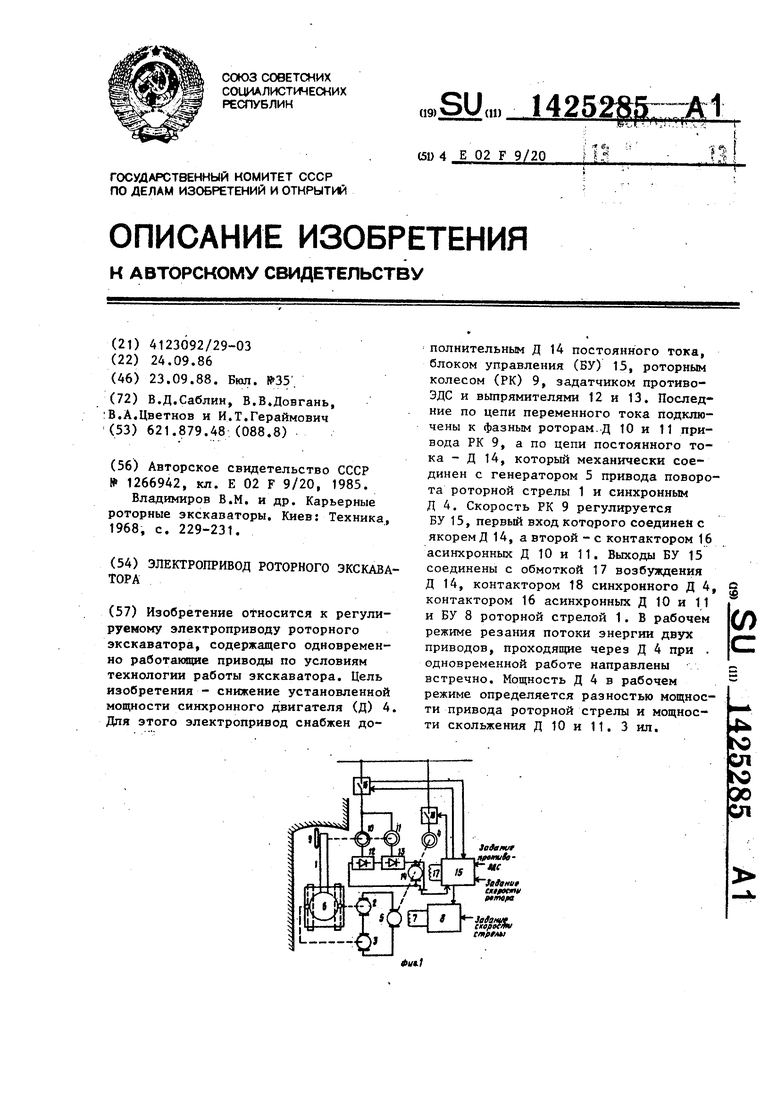
тор 25 скорости и регулятор 24 тока на узел 23 сравнения. Напряжение управления тиристорньм возбудителем уменьшается, снижая соответственно напряжение возбуждения и противоЭДС. При (jo в цепи постоянного тока асинхронного мапшнно-вентильнЕГ- го каскада появляется ток и привод роторного колеса разгоняется до установившегося значения скорости Vp.K.(iiT определяемого положением рукоятки сельсинного командоаппарата задания скорости ротора.
При снижении значения напряжения отпускания реле 29 последнее отключается и дает разрешение на включение привода роторной стрелы. Напряжение задания скорости роторной стрелы через резистор 30 подается на вход фазовыпрямительного устройст ва 31, где преобразуется, и через за датчик 32 интенсивности, регулятор 33 скорости, регулятор 34 тока, тири сторный возбудитель 35 поступает на обмотку 7 возбуждения генератора системы генератор - двигатель роторной стрелы. Напряжение генератора 5 подключено к двигателям 2 и 3, которые приводят в движение привод роторной стрелы 1 со скоростью Vp.c. .ст
В режиме резания роторная стрела с необходимой скоростью подается в забой и вращающимся роторным колесом происходит отработка забоя. При регу
лировании скорости асинхронных двига- 55 ключенным через второй контактор к телей роторного колеса машины 14 по- сети переменного тока, и блок управ- стоянного тока постоянно работает в ления стрелой, к первому входу кото- режиме двигателя, отдавая энергию рого подключен задатчик скорости скольжения асинхронных двигателей стрелы, а выход блока управления
ного агрегата.
мах мощность синхронного двигателя определяется мощностью каждого привода в отдельности.
Наибольшая мощность синхронного двигателя, полученная в приведенных режимах, определяет установленную мощность синхронного двигателя. Это будет большая из требуемых: мощности привода роторной стрелы или мощности скольжения асинхронных двигателей привода роторного колеса.
Применение изобретения позволяет снизить металлоемкость экскаватора, уменьшив массу роторного экскаватора и площадь, занимаемую электрооборудованием, за счет использования асинхронных двигателей для привода роторного колеса и снижения мощности синхронного двигателя преобразовательного агрегата.
Формула изобретения
Электропривод роторного экскавато- ра, включающий привод роторного колеса, состоящий из включенных параллель- но двух двигателей, подключенных к ее- сети через первый контактор, задатчи- ка скорости ротора, и привод ротор - ной стрелы, содержа ций последовательно соединенные два двигателя постоянного тока, подключенные к генератору постоянного тока, механически соединенный с синхронным двигателем, под
Стрелой подключен к обмотке возбужде- йия генератора постоянного тока, Отличающийся тем, что, С целью снижения установленной мощ- Ности синхронного двигателя, электро- тривод снабжен дополнительным двигателем постоянного тока, блоком управ- leHHH роторным колесом, задатчиком 1ротивоЭДС и двумя выпрямителями, i двигатели роторного колеса выполне- ш асинхронными с фазным ротором, к ;)оторам которых подключены выпрями- гепи, выходы которых соединены по- гледсвательно и подключены к дополнительному двигателю постоянного тока,
обмотка возбуждения которого подключена к первому выходу блока управления роторным колесом, второй -выход которого подключен к второму входу блока управления роторной стрелой, а третий и четвертый выходы подключены соответственно к управляющим входам первого и второго контакторов, а управляющий выход первого контактора подключен к третьему входу блока управления роторным колесом, к четвертому входу которого подключено напряжение якоря дополнительного двигателя постоянного тока, соединенного механически с синхронным двигателем.
Фиг. г
| Система автоматизированного управления роторным экскаватором | 1985 |
|
SU1266942A2 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Владимиров В.М | |||
| и др | |||
| Карьерные роторные экскаваторы | |||
| Киев: Техника, 1968, с | |||
| Приспособление для подачи воды в паровой котел | 1920 |
|
SU229A1 |
