W Л 12- 13
О О
ы ел
Изобретение относится к средствам автомат изации производственного процесса в землеройной технике, в частности к устройству для автоматического управления экскаватором с автономным обеспечением электроэнергией электроприводов и хода машины.
Известен роторный экскаватор, содержащий датчик фактической производительности, задатчик скорости поворота стрелы и пороговый элемент, включенные на вход сумматора, выход которого через решающий блок соединен с блоком управления. Устройство предназначено для стабилизации производительности экскаватора с учетом теплового состояния двигателя рабочего органа.
Однако это устройство не контролирует работу конвейера, что приводит к снижению производительности и поломке машины.
Наиболее близким к предлагаемому является устройство для управления роторным траншейным экскаватором, содержащее привод рабочего органа (ротора), в кинематическую цепь которого включена электромагнитная порошковая муфта, обмотка управления муфты соединена с усилителем привода ротора, подключенным к датчику скорости ротора и к пультууправления. К обмотке управления последовательно подключен датчик тока, соединенный с блоком управления приводом хода экскаватора.
Пои увеличении твердости грунта происходит увеличение нагрузки на ротор и вал порошковой муфты, что приводит к Частичному проскальзыванию муфты и некоторому снижению скорости ротора, ГЦ5и этом уменьшается напряжение датчика скорости, увеличивается выходное напряжение усилителя привода ротора и ток в обмотке муфты. Увеличение тока в обмотке муфты приводит к увеличению выходного сигнала датчика тока и уменьшению суммарного входного сигнала блока уяравления приводом хода, вызывающего уменьшение скороcfH передвижения экскаватора. При встрече с препятствиями ротор останавливается, Напряжение датчика скорости ротора падает до нуля, что приводит к остановке хода экскаватора.
Однако это устройство имеет ряд существенных недостатков. Рабочие органы: ход машины, ротор и конвейер не связаны полностью между собой, а также отсутствует прямая и обратная связь между ними, что приводит к большим трудностям в Эксплуатации, к непредвиденным поломкам рабочих органов и снижению эксплуатационной производительности машины.
Целью изобретения является повышение производительности путем плавного регулирования скорости хода.
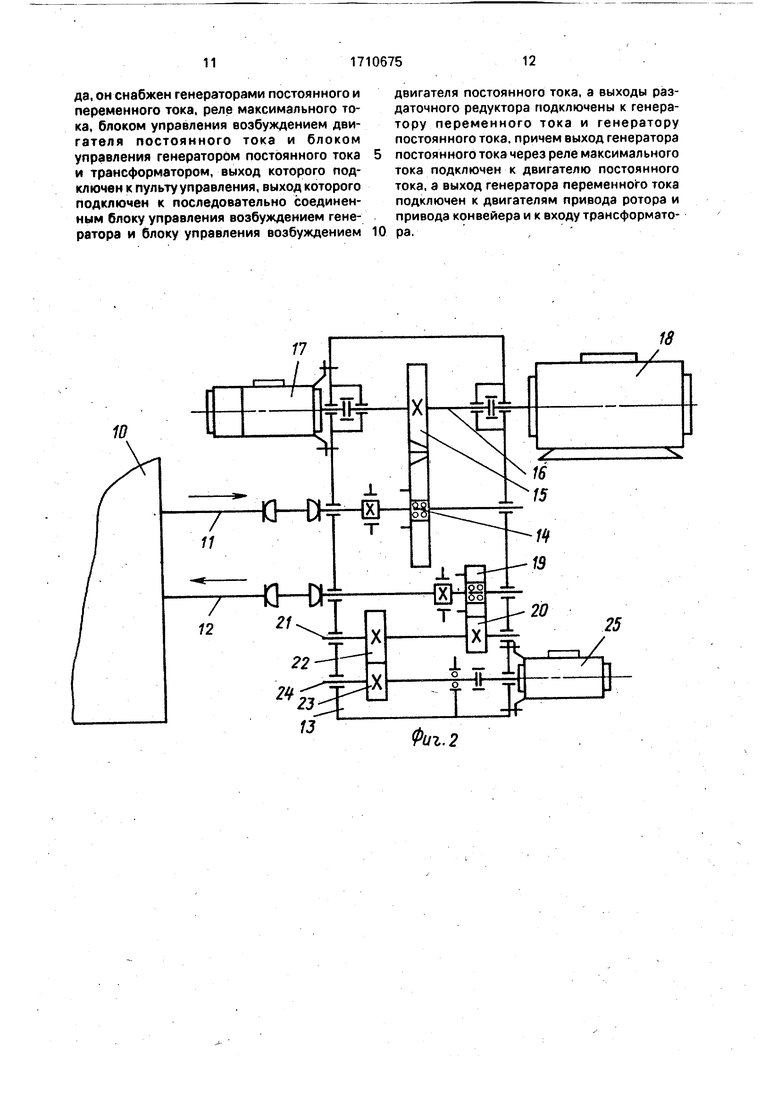
Для этого электропривод снабжен генераторами постоянного и переменного тока, реле максимального тока, блоком управления возбуждением двигателя постоянного тока и блоком управления генератором постоянного тока и трансформатором, выход которого подключен к пульту управления, выход которого подключен к последовательно соединенным блоку управления возбуждением генератора и блоку управления возбуждением двигателя постоянного тока, а выходы раздаточного редуктора подключены к генератору переменного тока и генератору постоянного тока, причем выход генератора постоянного тока через реле максимального тока подключен к двигателю постоянного тока, а выход генератора переменного токе подключен к двигателям привода ротора и привода конвейера и к ёходу трансформатора,
В результате обеспечивается автоматическое управление рабочих органов и передвижение всей машины в автоматическом режиме с плавным изменением скорости передвижения экскаватора.
На фиг.1 показан предлагаемый электропривод; на фиг,2 - кинематическая схема раздаточного редуктора с генераторами и электродвигателями постоянного тока: на фиг.З - электрческая принципиальная схема работы экскаватора.
Экскаватор представляет собой самоходную машину непрерывного действия, состоящую из тягача 1. и пульта 2 управления. Тягач 1 соединен при помощи шарнира 3 с рабочим органом 4, включающим ротор 5. который приводится в движение электродвигателем 6 и служащим для разработки и подъема грунта на конвейер 7, Конвейер приводится в движение зпектродвигателем 8 и предназначен для выброса грунта в отвал.
Для поддержания хвостовой части рабочего органа 4 предусмотрена рама 9, В задней части тягача 1 имеется коробка 10 перемены передач, от которой отуодят два карданных вала: вал 11 отбора мощности и вал 12 для обратной связи, управляющий приводом хода машины. Два карданных вала 11 и 12 соединены со специальным раздаточным редуктором 13.
Раздаточный редуктор 13 (фиг.2) состоит из двух частей, независимых друг от друга, В верхнюю часть раздаточного редуктора 13 через вал 11 и шестеренчатые передачи 14 и 15 передается вращение на вал 16, на котором расположены генераторы 17 и 18 постоянного и переменного токов соответственно. В нижней части раздаточного редуктора 13 через вал 12, управляющий приводом хода машины, шестеренчатые передачи 19 и 20, промежуточный вал 21 и шестеренчатые передачи 22 и 23 осуществляется связь с валом 24, на котором установлен электродвигатель 25 постоянного тока.
Электродвигатели б и 8 на экскаваторе применяются, например, серии 4А ОСТ 16.05.10,026-76, защита от перегрузок и коротких замыканий электродвигателя осуществляется при помощи автоматических выключателей 26 и 27, (например, серии АП50Б-ЗМТ, ТУ 16-522.139-78).
Защита от коротких замыканий и перегрузок цепи управления и обмоток управления электродвигателями и генератором осуществляется автоматическими выключателями 28-30 серии АП50-Б. Включение электродвигателей 6 и 8 осуществляется при помощи контакторов 31-33, которое своими нормально открытыми контактами 31.1, 32.1, 33.1 создают цепь питания электродвигателям. На экскаваторе применяются контакторы серии КМ 2000, ОБС.463.084.ТО. Включение контакторов производится при помощи кнопочных станций 34-36. Отключение контакторов производится при помощи стоповых кнопочных станций 37 и 38. Цепь управления работы зкскаватора питается от трансформатора 39 {380/220В), например, серии ОСМ1, 380/220, ТУ 16-717.137-83. Защита цепиуправления от короткого замыкания осуществляется автоматическими выключателями 28 и 29.
На экскаваторе генератор 17 постоянного тока и электродвигатель 25 постоянного тока применяются с независимыми обмотками возбуждения: генератор 17, обмотка 40 возбуждения, электродвигатель 25, обмотка 41 возбуждения. Зэпитывание обмоток возбуждения осуществляется через выпрямительный блок42, Для обеспечения стабилизации постоянного тока установлены конденсатор 43 например, МБГО-2-600-10 ± 10%, ОЖО,462,023 ТУ) и регулируемый резистор 44 (1ПЭВР-100-680 Ом ± 10%, ГОСТ 6513-75). Защита обмоток возбуждения предусмотрена автоматическими выключателями 30,
Защита электродвигателя 25 |;1остоянного тока от перегрузок и коротких замыкаНИИ осуществляется при помощи реле 45 максимального тока, котороесвоим нормально открытым контактом 45,1 при возникающих перегрузках переключает независимую обмотку 41 возбуждения. Реле 45 применяется (например, серии РЭВ-570. ОБК469.329),
Защита генератора 17 от перегрузок осуществляется за счет контроля тока в обмотке 40 возбуждения при помощи реле 46 максимального тока, используемое, например, серии РТ-40, ТУ 16-523.468-78.
Включение системы передвижения экскаватора осуществляется при помощи электродвигателя 25,, который включается при помощи контакторов 47 и 48 реверсивно в любом направлении. Для работы в условиях постоянного тока контакторы 47 и 48 применяются, например, серии МК2 ГОСТ 921975, Оперативное управление контакторов производится кнопочными станциями; вперед 49, назад 50. Остановка передвижения экскаватора осуществляется за счет кнопочного поста 51 управления (кнопочные станции 34-38, 47, 48, 49 применяются, например, серии ПКЕ, ТУ 16-526), При возникающих бросках тока в обмотке 40 возбуждения генератора 17 на экскаваторе предусмотрено гашение бросков тока за счет параллельно установленного постоянного резистора 52, который сглаживает ток и защищает обмотку 40 возбуждения. Изменение скорости вращения осуществляется при помощи регулируемого резистора 53. На машине применены панельные реостаты, например, серии РПОМ-532-0243. Ту 16.527-014-75, Последовательно-обмотки 41 возбуждения электродвигателя 25 включен постоянный резистор 54, например, серии 1 ПЭВР-100-1000 Ом ±10%, ГОСТ 6513-75, Обмотка возбуждения 40 генератора постоянного тока 14 и обмотка возбуждения 41 электродвигателя постоянного тока 15 подключены к выходу трансформатора 39.
Электропривод работает следующим образом,
, Коробка 10 перемены передач от тягача 1 через вал 11 отбора мощности и шестеренчатые передачи 14 и 15 постоянно передает вращение на вал 16, на котором находятся генераторы 17 и 18. Генератор 18 обеспечивает питание переменным напряжением 380 В все потребители экскаватора: ротор 5, конвейер 7, цепь управления через понижающий трансформатор 39 и систему независимого возбуждения обмоток 40 и 41, которые питаются от выпрямительного блока 42. При помощи кнопочной станции 34 включается контактор 31, который своими контактами 31.1 подает напряжение на электродвигатель 6 привода ротора. Контактор 31 своими управляющими нормально открытыми контактами 31.2, замыкаясь, создает цепь питания для контакторов 47, 48
хода экскаватора. Контактор 31 своими нормальнс) открытыми контактами 31.3, замыкаясь, создают цепь питания контактора 33 конвейера. Контактор 31 своими нормально закрытыми контактами 31.4 размыкает цепь контактора 32. Этим гарантируется реверсивное включение контакторов 31 и 32. Отключение электродвигателя 6 привода ротора производится отключением кнопочной станции 37. При этом размыкаются контакты 31.1, 31.2, 31,3 и замыкается контакт 31.4. Для включения вращения ротора 5 в обратную сторону необходимо нажать кнопочную станцию 35. при этом включается контактор 32, который замыкает свои силовые нормально открытые контакты 32.1, подается напряжение на электродвигатель 6 привода ротора и он начинает вращаться в обратную сторону.
Контактор 32 своими нормально закрытыми контактами 32.2 размыкает цепь для контактора 31. Отключение производится при помощи стоповой кнопочной станции 37. Отключаются силовые«онтакты 32.1, останавливается электродвигатель 6. Включаются управляющие .контакты 32.2 и создается цепь питания для контактора 31. Нормальная работа реверсивного включения контакторов 31 и 32 обеспечена. Включение конвейера 7 производится путем нажатия кнопочной станции 36. При этом включается контактор 33, который своими силовыми контактами 33.1 подает напряжение на электродвигатель 8 привода конвейера 7. Контактор 33 замыкает свои нормально открытые контакты 33.2 в цепи питания контактора 47, подготавливая и обеспечивая включение системы передвижения экскаватора вперед.
При нажатии кнопочной станции 49 включается контактор 47, который своими силовыми контактами 47.1, 47.2 подает напряжение на обмотку 40 возбуждения генератора 17. Контактор 47 свои управляющие нормально закрытые контакты 47.3 размыкает в цепи питания контактора 48. Генератор 17 начинает выдавать постоянное напряжение.на электродвигатель 25. Управление последним производится вручную за счет резистора 53 путем изменения величины его сопротивления. Изменение сопротивления производится дистанционно и вручную с пульта 2 управления. Так как резистор 53 включен последовательно обмотки 41, то при изменении его величины меняется скорость вращения электродвигателя 25. Для остановки вращения электродвигателя 25 необходимо снять питание обмотки 40 возбуждения с генератора 17 путем нажатия на кнопочный пост 51.
Экскаватор в рабочем положении передвигаться назад не должен. Для обеспечения маневра, а также в других обстоятельствах передвижение экскаватора назад возможно только вручную. Путем нажатия кнопочной станции 50 подается напряжение на контактор 48, который срабатызая, замыкает своим силовые нормально открытые контакты 48.1, 48.2. Контактор 48
0 свои управляющие, нормально закрытые контакты 48,3 размыкает в цепи питания контактора 47. Этим обеспечивается реверсивное включение контакторов 47 и 48 и подача напряжения на обмотку 40, исключая короткое замыкан1 1е. Отключение передвижений экскаватора назад производится путем нажатия на кнопочный пост 51, при этом контактор 48 отключается и свои контакты 48.1 и 48.2 размыкает, а контакты 48.3
0 замыкает. Схема приходит в исходное положение.
В автоматическом режиме электропривод работает следующим образом.
Запуск экскаватора производится с
5 включения кнопочной станции 36. в результате чего подается напряжение на контактор 33, который своими силовыми контактам.иЗЗ,1 включает электродвигатель 8 привода конвейера. Контактор 33 замыкает свои управляющие контакты 33.2 и создается цепь питания для контактора 47, который замыкает силовые контакты 47.1 и 47,2,включающие обмотку 40 возбуждения генератора 17. Последний возбуждается и подает напряжение на электродвигатель 23 постоянного тока. Экскаватор не передвигается, так как регулируемый резистор 53 находится в исходном положении. Контактор 33 также замыкает свои нормально открытые контакты 33.3 в цепи питания катушки.
Скорость передвижения экскаватора зависит от прочности грунта при помощи регулируемого резистора 53. После этого
5 экскаватор начинает работать в автоматическом режиме без прямого участия оператора, который визуально ведет наблюдение за его работой. При работе экскаватора плотность грунта может значительно изменяться
0 (от 1 до 4 категории), в результате чего нагрузка на электроприводы ротора и конвейера может резко возрастать, что вызывает увеличение нагрузки на системы передвижения .экскаватора. Для предотвращения
5 этого и обеспечения автоматической защиты рабочих органов от перегрузки и поломок установлено реле 45 максимального тока в цепи питания электродвигателя 25, а также реле 46 максимального тока в цепи питания обмотки 40 возбуждения генератора 17,
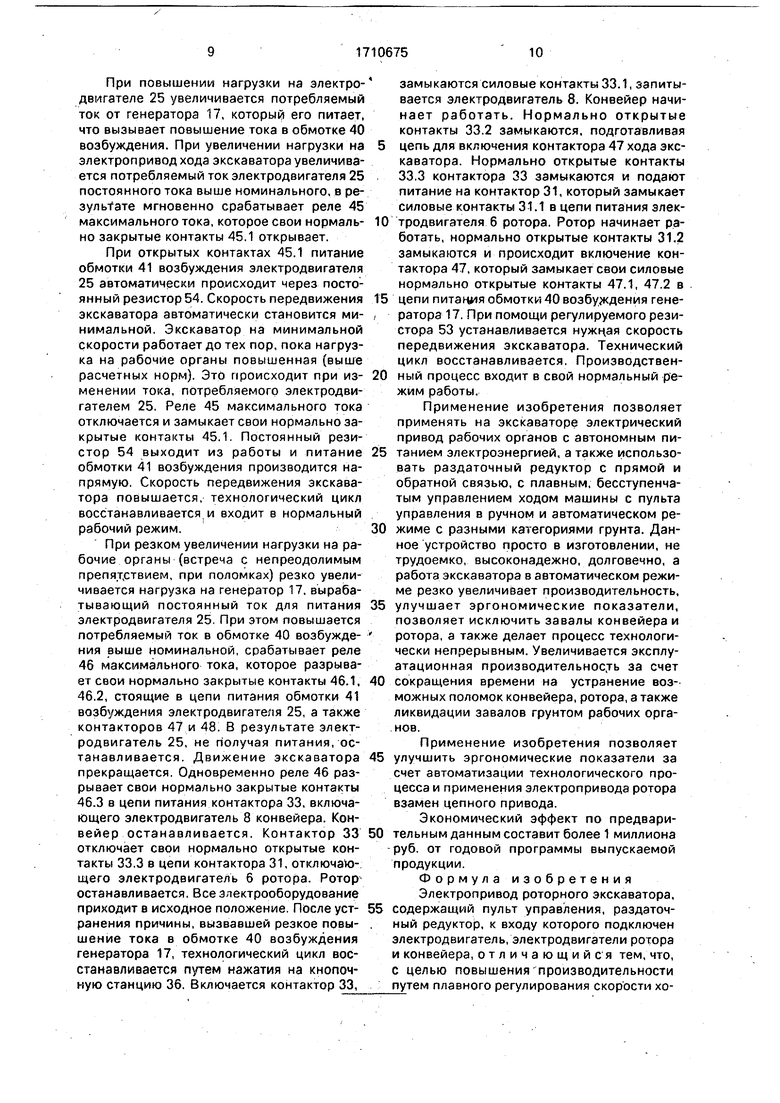
При повышении нагрузки на электродвигателе 25 увеличивается потребляемый ток от генератора 17, который его питает, что вызывает повышение тока в обмотке 40 возбуждения. При увеличении нагрузки на электропривод хода экскаватора увеличивается потребляемый ток электродвигателя 25 постоянного тока выше номинального, в резyлbfaтe мгновенно срабатывает реле 45 максимального тока, которое свои нормально закрытые контакты 45.1 открывает.
При открытых контактах 45.1 питание обмотки 41 возбуждения электродвигателя 25 автоматически происходит через постоянный резистор 54. Скорость передвижения экскаватора автоматически становится минимальной, Экскаватор на минимальной скорости работает до тех пор, пока нагрузка на рабочие органы повышенная (выше расчетных норм). Это происходит при изменении тока, потребляемого электродвигателем 25. Реле 45 максимального тока отключается и замыкает свои нормально закрытые контакты 45.1. Постоянный резистор 54 выходит из работы и питание обмотки 41 возбуждения производится напрямую. Скорость передвижения экскаватора повышается, технологический цикл восстанавливается и входит в нормальный рабочий режим.
При резком увеличении нагрузки на рабочие органы (встреча с непреодолимым препят ствием, при поломках) резко увеличивается нагрузка на генератор 17. вырабатывающий постоянный ток для питания электродвигателя 25. При этом повышается потребляемый ток в обмотке 40 возбуждения выше номинальной, срабатывает реле 46 максимального тока, которое разрывает свои нормально закрытые контакты 46.1, 46.2, стоящие в цепи питания обмотки 41 возбуждения электродвигателя 25, а также контакторов 47 и 48. В результате электродвигатель 25, не Нолучая питания, останавливается. Движение экскаватора прекращается. Одновременно реле 46 разрывает свои нормально закрытые контакты 46.3 в цепи питания контактора 33, включающего электродвигатель 8 конвейера. Конвейер останавливается. Контактор 33 отключает свои нормально открытые контакты 33.3 в цепи контактора 31, отключающего электродвигатель 6 ротора. Ротор останавливается. Все электрооборудование приходит в исходное положение. После устранения причины, вызвавшей резкое повышение тока в обмотке 40 возбуждения генератора 17, технологический цикл восстанавливается путем нажатия на кнопочную станцию 36. Включается контактор 33,
замыкаются силовые контакты 33.1, запитывается электродвигатель 8. Конвейер начинает работать. Нормально открытые контакты 33.2 замыкаются, подготавливая цепь для включения контактора 47 хода экскаватора. Нормально открытые контакты 33.3 контактора 33 замыкаются и подают питание на контактор 31, который замыкает силовые контакты 31.1 в цепи питания электродвигателя 6 ротора. Ротор начинает работать, нормально открытые контакты 31.2 замыкаются и происходит включение контактора 47, который замыкает свои силовые нормально открытые контакты 47.1, 47.2 в цепи обмотки 40 возбуждения генератора 17. При помощи регулируемого резистора 53 устанавливается нужцая скорость передвижения экскаватора. Технический цикл восстанавливается. Производственный процесс входит в свой нормальный режим работы.
Применение изобретения позволяет применять на экскаваторе электрический привод рабочих органов с автономным питанием электроэнергией, а также использовать раздаточный редуктор с прямой и обратной связью, с плавным, бесступенчатым управлением ходом машины с пульта управления в ручном и автоматическом режиме с разными категориями грунта. Данное устройство просто в изготовлении, не трудоемко, высоконадежно, долговечно, а работа экскаватора в автоматическом режиме резко увеличивает производительность, улучшает эргономические показатели, позволяет исключить завалы конвейера и ротора, а также делает процесс технологически непрерывным. Увеличивается эксплуатационная производительнос.ть за счет сокращения времени на устранение возможных поломок конвейера, ротора, а также ликвидации завалов грунтом рабочих органов.
Применение изобретения позволяет улучшить эргономические показатели за счет автоматизации технологического процесса и применения электропривода ротора взамен цепного привода.
Экономический эффект по предварительным данным составит более 1 миллиона руб. от годовой программы выпускаемой продукции.
Формула изобретения
Электропривод роторного экскаватора, содержащий пульт управления, раздаточный редуктор, к входу которого подключен электродвигатель, электродвигатели ротора и конвейера, отличаю щи и с я тем, что, с целью повышенияпроизводительности путем плавного регулирования скорости хода, он снабжен генераторами постоянного и переменного тока, реле максимального тока, блоком управления возбуждением двигателя постоянного тока и блоком управления генератором постоянного тока и трансформатором, выход которого подключен к пульту управления, выход которого подключен к последовательно соединенным блоку управления возбуждением генератора и блоку управления возбуждением
двигателя постоянного тока, а выходы раздаточного редуктора подключены к генератору переменного тока и генератору постоянного тока, причем выход генератора постоянного тока через реле максимального тока подключен к двигателю постоянного тока, а выход генератора переменного тока подключен к двигателям привода ротора и привода конвейера и к входу трансформатора.


| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод роторного экскаватора | 1988 |
|
SU1717731A1 |
| Устройство для управления шнекороторным экскаватором | 1988 |
|
SU1629417A1 |
| ЭЛЕКТРОПРИВОД УСТРОЙСТВА ТРАНСПОРТИРОВКИ | 1991 |
|
RU2063343C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОДВИГАТЕЛЕМ ВИБРАТОРА | 2003 |
|
RU2239935C1 |
| Электропривод для автоматического удержания вала насосного агрегата | 1984 |
|
SU1319214A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПЕРЕДВИЖЕНИЕМ РОТОРНОГО ЭКСКАВАТОРА | 1970 |
|
SU286916A1 |
| Устройство для дистанционного управления электроприводом врубовой машины и ее лебедки | 1940 |
|
SU63876A1 |
| Устройство для управления рентгеновской установкой для просвечивания изделий | 1937 |
|
SU55993A1 |
| ЭЛЕКТРОПРИВОД МЕХАНИЗМА ПОВОРОТА ГРУЗОПОДЪЕМНОГО КРАНА | 2005 |
|
RU2298519C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ПРОЦЕССОМ ВИБРОФОРМОВАНИЯ ЯЧЕИСТОБЕТОННОЙ СМЕСИ | 1992 |
|
RU2027589C1 |

Изобретение относится к автоматизации производственного процесса в землеройной технике, в частности к устройству для автоматического управления экскаватором с автономным обеспечением электроэнергией электроприводов и хода машины. Экскаватор представляет собой самохбд- ную машину непрерывного действия, состоящую из лульта 2 управления и тягача 1,соединенного при помощи шарнира 3 с рабочим органом (РО) 4. Последний содержит ротор 5, который приводится в Движение электродвигателем 6 и служит для разработки и подьема грунта на конвейер 7. Конвейер 7 приводится в движение электродвигателем 8 и предназначен для выброса грунта в отвал. Для поддержания хвостовой части РО 4 предусмотрена рама 9. В задней части тягача 1 имеется коробка 10 передач, от которой отходят вал 11 отбора мощности и вал 12 для обратной связи, управляющий приводом хода машины. Валы 11 и 12 соединены со специальным раздаточным редуктором 13, что позволяет применять на экскаваторе электрический привод РО с автономным питанием электроэнергией, а также раздаточный редуктор с прямой и обратной связью, с плавным, бесступенчатым управлением ходом машины с пульта управления в ручном и автоматическом режимах с разными категориями грунта. 3 ил.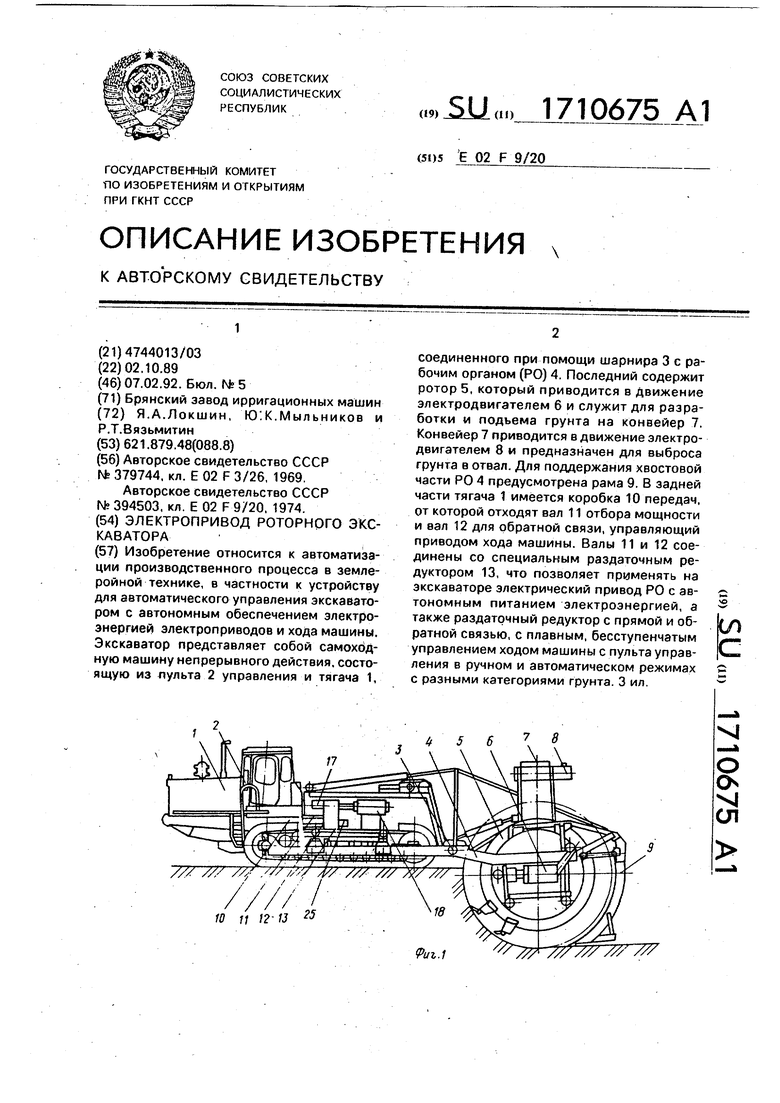
21
25
Фиг, 2
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ РЕЖИМА РАБОТЫ РОТОРНОГО ЭКСКАВАТОРА | 0 |
|
SU379744A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
