4 Ю СП
СдЭ
СХ)
Фиг,1
114
Изобретение относится к машиностроению, а именно к средствам измерения вибраций, и может быть использовано в устройствах активного гашения вибраций.
Целью изобретения является повышение точности измерений за счет снижения перекрестных связей между каналами измерения,
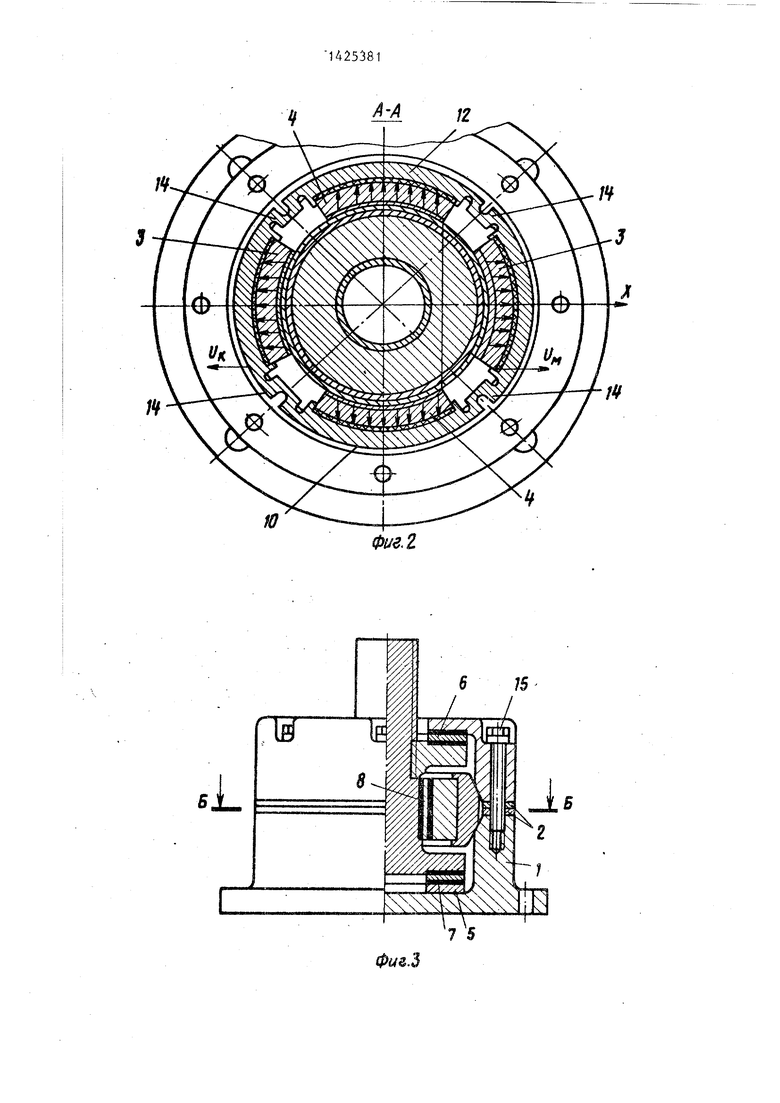
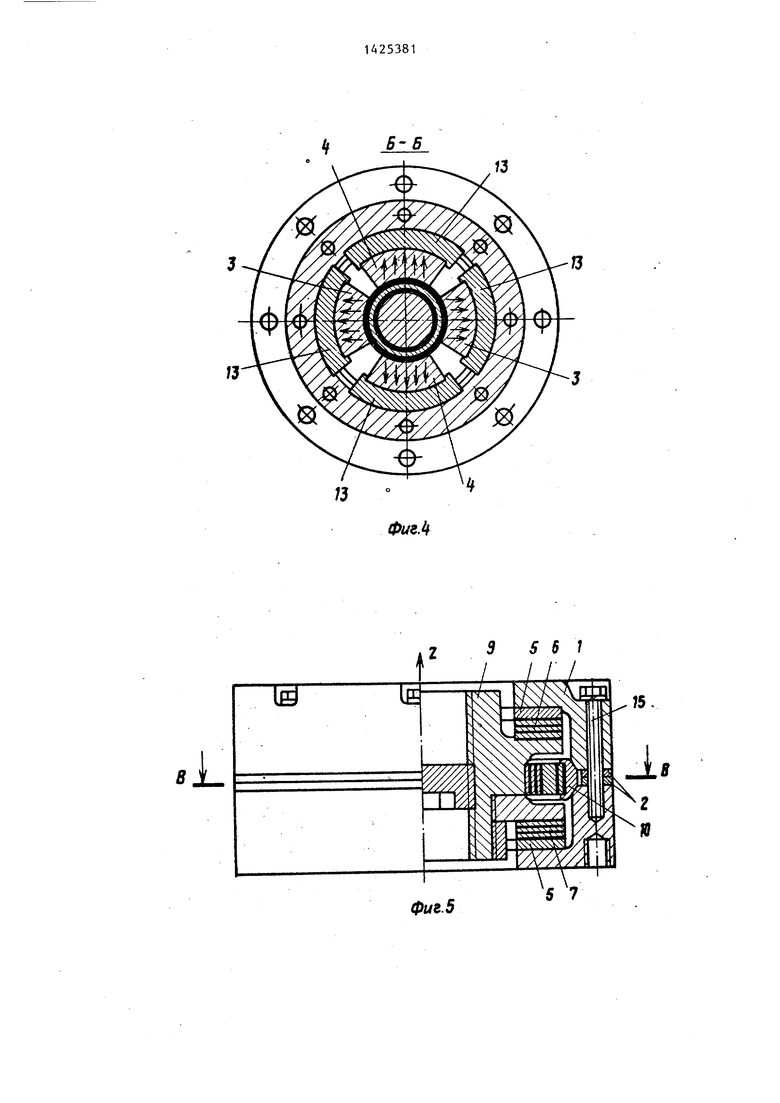
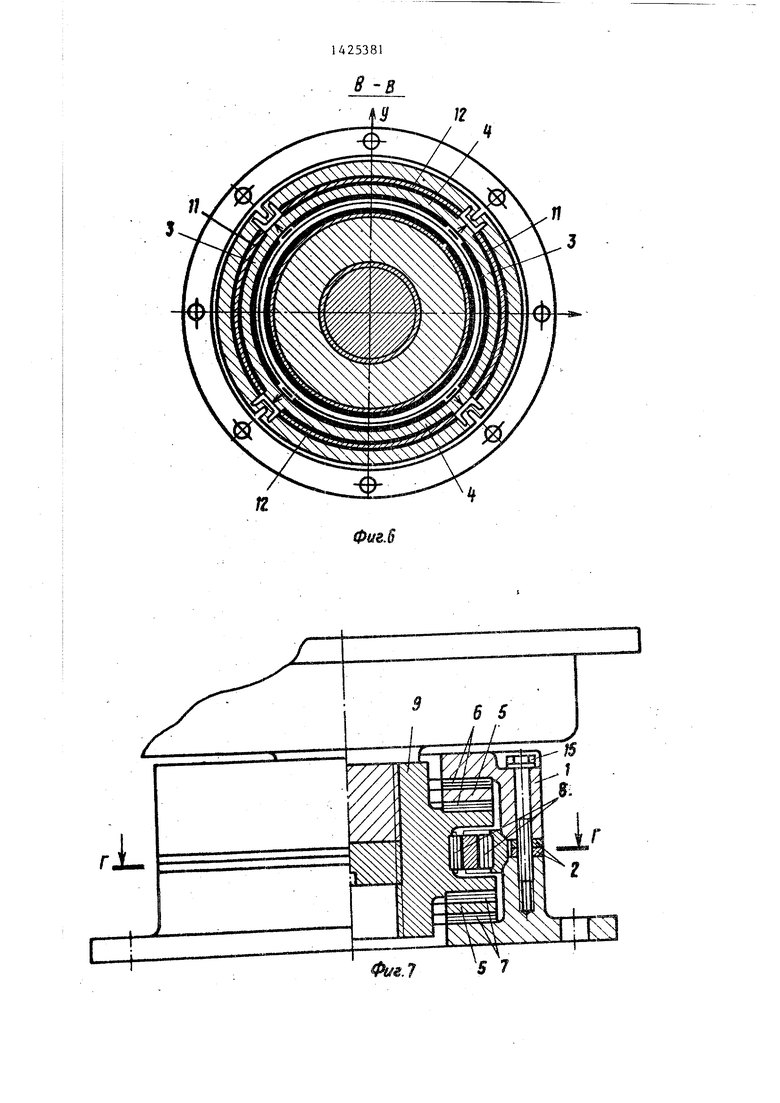
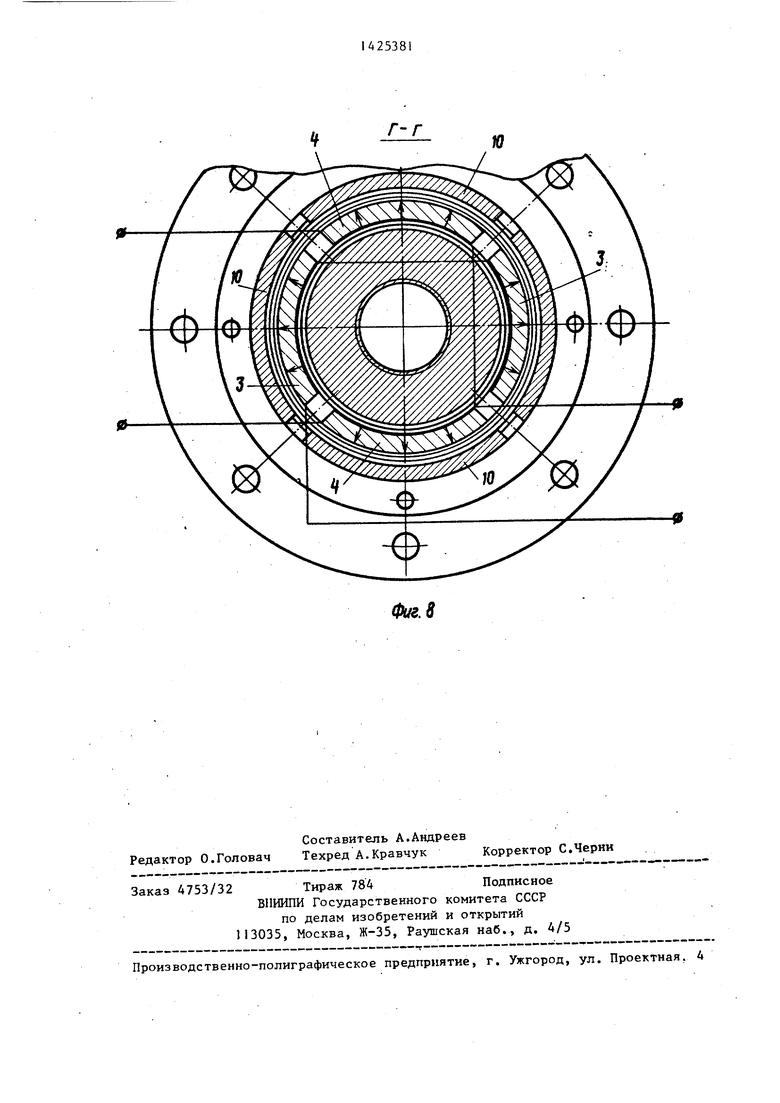
На фиг,1 изображена конструктивная схема силоизмерительного узла упругой опоры с кольцевым прижимным фиксатором и датчиками в виде кольцевых частейпьезоэлементов} на фиг,2 - сечение А-А на фиг, 1; на фиг;3 - схема силоизмерительного узла с прижимным фиксатором в виде кольцевых частей; на фиг,4 - сечение Б-Б на фиг,3; на фиг,5 - схема си- лоизмерительного узла с кольцевым пьезоэлементом, включающим четыре электрода; на фиг,6 - сечение В-Б на фиг,5; на фиг.7 - схема силоизмерительного узла с размещением неравно- жестких упругих, элементов по обе стороны пьезоэлементов; на фиг,8 - сечение Г-Г на фиг, 7.
Силоизмерительный узел упругой опоры содержит полый разъемный кор- пус 1 с регулировочными прокладками 2, размещенные в нем по трем взаимно перпендикулярным направлениям сило- измерительные датчики 3-5, неравно-, жесткие упругие элементы 6-8, опорный элемент 9 в виде втулки с центральным резьбовым отверстием и прижимной фиксатор 10,
Один из силоизмерительных датчиков (например, датчик 5) вьтолнен в виде одного или двух кольцевых пьезоэлементов, установленных соосно опорной втулке 9 между ее торцами и внутренними торцовыми поверхностями частей корпуса 1, Другие силоизме- рительные датчики (3, 4) выполнены в виде кольцевого пьезозлемента, име нлцего электроды 11 и 12, или в виде четьфех кольцевых частей пьезоэлемен та. Электроды и кольцевые части равномерно расположены ,по окружности вокруг втулки 8 с зазорами в окружном направлении друг относительно друга.
Прижимной фиксатор 10 выполнен в виде кольца или четырех кольцевых частей 13. При выполнении прижимного фиксатора в виде кольца он имеет четыре уточненных участка 14 (с
Q
j 0 5
О
... 0
5
5
меньшей жесткостью), расположенные напротив зазоров между электродами 11, 12 или кольцевыми частями 3 и 4 пьезоэлементов. Части корпуса 1 стянуты болтами 15,
Силоизмерительный узел упругой опоры (фиг,1 и 2) работает следующим образом.
Толщина регулировочных прокладок 2 выбирается так, чтобы при скреплении частей корпуса 1 путем завинчивания стяжных болтов 15 автоматически обеспечивалась фиксация и равномерное поджатие неравножестких упругих элементов 6-8 и силоизмерительных датчиков 3-5 по направлениям их поляризации. Необходимая степень поджатия кольцевого пьезоэлемента 5 при этом обеспечивается силами упругой деформации неравножестких упругих элементов 6 и 7, а поджатие силоизмерительных датчиков 3 и 4 происходит при завинчивании стяжных болтов.15 потому, что взаимодействие конусных срезов частей корпуса 1 с конусными поверхностями кольцевого прижимного фиксатора 10 сопровождается деформацией его участков с пониженной жесткостью, благодаря чему -происходит радиальное перемещение прижимного фиксатора 10, На опорную втулку 9 действует.пространственная сила, величина и направле- , ние которой определяются вибр ацион- ными процессами в системе виброизоляции. Благодаря тому, что между опорной втулкой 9 и силоизмеритель- ными датчиками 3-5 установлены не- равножесткие упругие элементы 6-8, жесткость которых по направлениям поляризации силоизмерительных датчиков по крайней мере в несколько раз превосходит их жесткость в перпендикулярных к осям поляризации направлениях, на каждый из силоизмерительных датчиков 3-5 со стороны опорной втулки 9 преимущественно действуют только те составляющие измеряемого усилия, которые совпадают с направлением рабочих осей (осей поляризации) силоизмерительных датчиков, т,е, происходит разделение пространственной силы по осям прямоугольной системы коодринат, В результате воздействия осевых составляющих измеряемого усилия на кольцевой пье- зоэлемент 5, а поперечных составляющих на пары кольцевых частей 3 и 4
пьезоэлемента на -их электродах появляются заряды, знак которых определяется направлением изменения их деформации, вызванной предварительным поджатием, а величина зарядов пропоциональна величине соответствующих составляющих измеряемого усилия. Блгодаря наличию между опорной втулкой 9 и силоизмерительными датчика ми 3-5 неравножестких упругих элеметов 6-8 величина перекрестных искажений меясду выходными сигналами по трем взаимно перпендикулярным направлениям снижается. Кольцевые ча- сти пьезоэлемента в каждой паре соединяются последовательно, причем, если замыкаются внутрении электроды то внешние являются выходными электродами силоизмерительных датчиков и подключаются к входам усилителя заряда или напряжения, если замыкаются между собой внешние электроды, то выходньми являются внутренние электроды кольцевых частей пьезоэлемента.
В силоизмерительном узле (на фиг.З и 4) прижимной фиксатор 10 выполнен в виде четырех кольцевых частей, а силоизмерительные датчики 3 и 4 поперечных составляющих изме- ря емого усилия выполнены в виде двух пар кольцевых частей пьезоэлемента, расположенных по двум взаимн перпендикулярным радиальным направлениям. Неравножесткий упругий эле- мент 8, как и в конструкции силоиз- мерительного узла, изображенной на фиг. 1 и 2, обеспечивает равномерность давления поджатия датчиков 3 и 4 со стороны при жимного фиксатора 10. Отличие конструктивной схемы силоизмерительного узла упругой опоры, изображенной на фиг.5 и 6, состоит в том, что в качестве силоизмерительных датчиков 3 и 4 используется кольцевой пьезоэлемент с четырьмя зазорами между электродами 11 и 12.
Особенностью конструкций силоизм
рительного узла, изображенных на фиг.5-8, является установка пьезо- элементов силоизмерительных датчиков 3-5 между вдумя неравножесткими упругими элементами, что увеличивает его надежность при использовании в тяжело нагруженйых упругих опорах.
Применение в качестве опорного элемента силоизмерительного узла
5
втулки с центральным резьбовым отверстием, а в качестве силоизмерительных датчиков - составляющих входной силы кольцевого пьезоэлемента или четырех кольцевых частей пьезоэлемента с радиальной поляризацией (или поляризацией по двум взаимно перпендикулярным диаметрам) позволяет выполнить силоизмерительный узел в малых габаритах при одновременном увеличении точности измерения трех взаимно перпендикулярных составляющих силы, действующей на опорную втулку. Формула изобретения
1.Силоизмерительный узел упругой опоры, содержащий полый разъемный корпус, размещенные в нем по трем взаимно перпендикулярным направле- силоизмерительные датчики, взаимодействующие с ними неравножест- кие упругие элементы и опорный элемент, отличающийся тем, что, с целью повышения точности измерения, он снабжен размещенными между частями корпуса регулировочными прокладками и прижимным фиксатором, выполненным в виде кольца или четырех кольцевых частей для взаимодействия внутренней цилиндрической поверхностью непосредственно или через неравножесткие упругие элементы с силоизмерительными датчиками,
а внешняя поверхность образована двумя конусами для контакта с внутренней поверхностью корпуса, .опорный элемент вьтолнен в виде втулки с центральным резьбовым отверстием, один из силоизмерительных датчиков выполнен в виде одного или двух кольцевых пьезоэлементов, установленньк соосно с опорной втулкой между ее торцами и внутренними торцовыми поверхностями частей корпуса, а другие силоизмерительные датчики выполнены, в виде кольцевого пьезоэлемента, включающего четыре электрода, или в виде четырех кольцевых частей пьезоэлемента, равномерно расположенных по окружности вокруг втулки с зазо- pat-m в окружном направлении одна относительно другой.
2.Узел ПОП.1, отличаю- щ и и с я тем, что при выполнении
прижимного фиксатора в виде кольца он имеет четыре утоненных участка, расположенных против зазоров.
14
/V
/
| название | год | авторы | номер документа |
|---|---|---|---|
| Виброизолирующая опора | 1989 |
|
SU1746094A1 |
| ЦИФРОВОЙ МНОГОКОМПОНЕНТНЫЙ ДАТЧИК ПЕРЕМЕЩЕНИЙ | 2011 |
|
RU2475842C1 |
| Сканирующий туннельный микроскоп | 1987 |
|
SU1453475A1 |
| ДАТЧИК ИЗГИБАЮЩЕГО МОМЕНТА ДЛЯ ВИХРЕВЫХ РАСХОДОМЕРОВ | 2019 |
|
RU2709430C1 |
| Дифференциальный датчик давления с частотным выходом | 1989 |
|
SU1749734A1 |
| Виброгасящее устройство с автоматическим управлением | 1986 |
|
SU1406407A1 |
| Пьезоэлектрический датчик давления и способ его изготовления | 1990 |
|
SU1770794A1 |
| Пьезоэлектрический датчик давления и способ его настройки | 1989 |
|
SU1749733A1 |
| Датчик давления | 1991 |
|
SU1812458A1 |
| Пьезоэлектрический двигатель | 1991 |
|
SU1807548A1 |
Изобретение от.носится к машиностроению, а именно к средствам измерения вибраций, и может быть использовано в устройствах активного гашения вибраций. Цель изобретения - повышение точности измерения. Это достигается за счет.снижения перекрестных связей мещ1у каналами измерения. В результате действия усилия на кольцевой пьезоэлемент 5 или кольцевые части пьезоэлемента на их электродах появляются заряды, знак которых определяется направлением деформации при поджатии, а величина - измеряемым усилием.Благодаря опорной втулке 9, неравножестким упругим элементам 6, 7, 8, прижимному фиксатору 10 снижаются перекрестные искажения выходных сигналов пье- зоэлементов по трем взаимно перпендикулярным направлениям. Прижимной фиксатор 10 выполнен в виде кольца или четырех кольцевых частей. 1 з.п. ф-лы, 8 ил. с $ с/)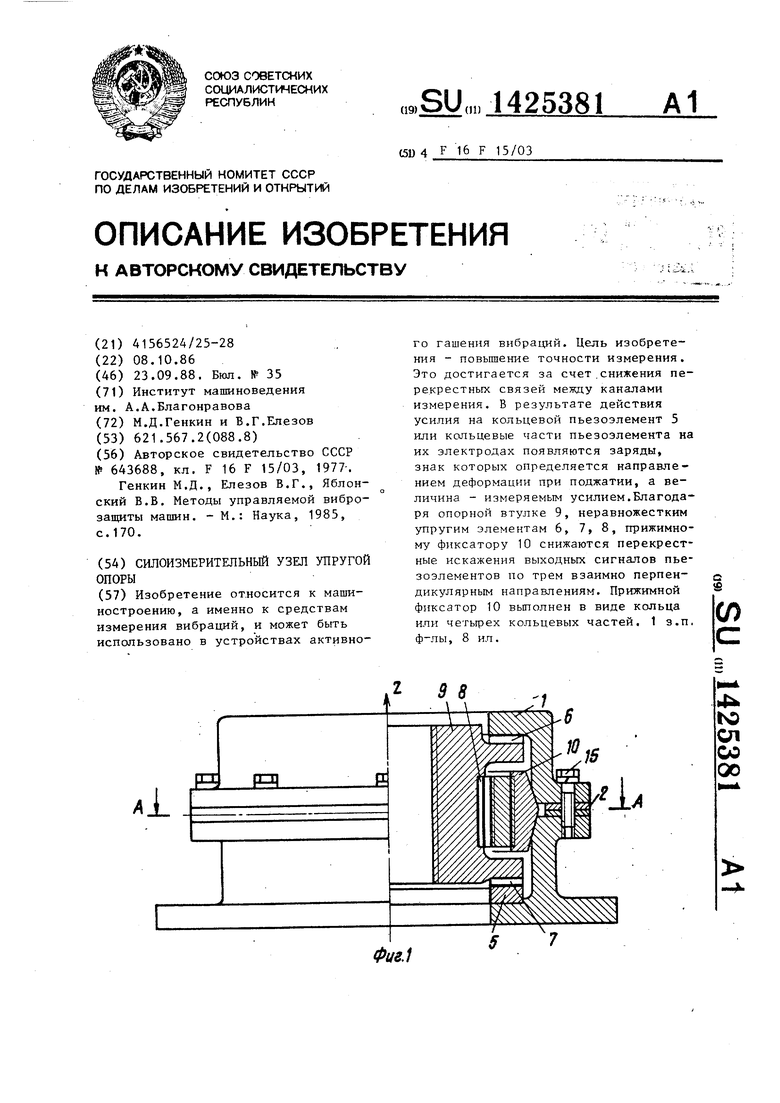
Фие.2
Фие.
5-5
13
ФмЛ
15
фиг. 5
J2
0lfe.S
Фе/.7
Фиг. 8
| Амортизатор с автоматическим управлением | 1977 |
|
SU643688A2 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
| Генкин М.Д., Елезов В.Г., Яблонский В.В | |||
| Методы управляемой виброзащиты машин | |||
| - М.: Наука, 1985, с.170. | |||
