Изобретение относится к измерительной технике, в частности к устройствам для измерения деформаций и перемещений, и предназначено для измерения статических или плавно меняющихся перемещений. Кроме того, оно может быть использовано для измерения параметров перемещения пишущего узла при записи и исследовании рукописных текстов.
Известно «Звуковое перо для считывания рукописной информации» (SU №460552 от 27.03.75 G06K 9/00). содержащее корпус, в котором укреплены излучатель и пишущий узел. Невысокая точность этого устройства в силу физических проблем распространения звуковых колебаний не позволяет использовать его для считывания рукописной информации.
Известно «Перо для ввода рукописных символов» (SU №638988 от 28.12.78 г., G06K 9/00), содержащее корпус с размещенным в нем пишущим стержнем, пьезоэлектрическими пластинами, расположенными вдоль стержня, инерционными элементами для учета ускорения движения устройства. Недостатком устройства является то, что снимаемый сигнал отражает интегральную характеристику движения пера, но не фиксирует особенности почерка, а именно частные признаки почерка, в том числе и усилие давления на пишущий узел.
Наиболее близким к заявляемому техническому решению является «Многокомпонентный датчик перемещений» (RU №2 422 785 от 27.06 201 1, G01L 1/04). который снабжен силоприемным элементом, выполненным в виде упругого цилиндрического стержня, жестко защемленного во внутренней проточке корпуса датчика, а чувствительный элемент выполнен в виде двух полых конусов, сопряженных своими основаниями большого диаметра с цилиндрическим кольцом и разрезанных по образующим на ряд упругих секций, при этом первый полый конус жестко скреплен своим малым основанием с корпусом и посредством контакта боковой внешней конической поверхностью с внутренней конической поверхностью цанги, установленной с возможностью осевого перемещения и фиксируемой с помощью прижимной втулки, второй полый конус, состоящий из упругих секций с тензодатчиками, установленными в области наибольших деформаций, соединен с первым полым конусом с помощью цилиндрического кольца, ограничивающего перемещение цанги, каждая из упругих секций представляет собой сдвоенные балки, размещенные по кольцу, защемленные с одной стороны во внутренней проточке корпуса, а с другой стороны контактирующие с цилиндрической поверхностью силоприемного элемента посредством ограничительного пружинного кольца. Недостатком приведенного решения является сложность конструктивного исполнения, сложность и длительность тарировки датчика и проведение измерений, невозможность измерения осевого перемещения.
Задачей изобретения является расширение функциональных возможностей устройства за счет избирательного по всем направлениям пространства измерения статических или плавно меняющихся перемещений с их последующей оцифровкой.
Задача изобретения решается тем, что цифровой многокомпонентный датчик перемещений выполнен следующим образом: силоприемный элемент в виде полого стержня с установленным в нем пишущим узлом, соединен торцом с чувствительным элементом, выполненным в виде тонкостенной оболочки вращения, защемленной большим опорным основанием в корпусе датчика, причем стержень силоприемного элемента с пишущим узлом шарнирно закреплен в выходной части корпуса с возможностью осевого перемещения и поворота, при этом ось пишущего узла совпадает с продольной осью датчика, тонкостенная оболочка чувствительного элемента выполнена в виде усеченного полого параболоида вращения с расположенными по образующим прямоугольными окнами, а разделяющие их перемычки представляют собой упругие элементы в виде балок с наклеенными на них, в зоне наибольших деформаций, тензодатчиками радиальных перемещений, причем прямоугольные окна выполнены в виде прорезей минимальной ширины, увеличивающих количество разделяющих их перемычек, в зоне наибольших деформаций у большого сечения параболоида вращения, упомянутая тонкостенная оболочка в своем меньшем сечении соединена с силоприемным элементом с возможностью радиального и осевого перемещения, малое сечение оболочки параболоида выполнено в виде упругой мембраны с жестким центром в виде втулки с размещенным в ней пьезодатчиком осевого перемещения, а элемент передачи осевого перемещения пишущего узла выполнен в виде шарика, контактирующего с пьезоэлементом, в качестве которого использован пьезоэлемент прямого эффекта перемещений, причем ось чувствительности пьезоэлемента совпадает с продольной осью датчика.
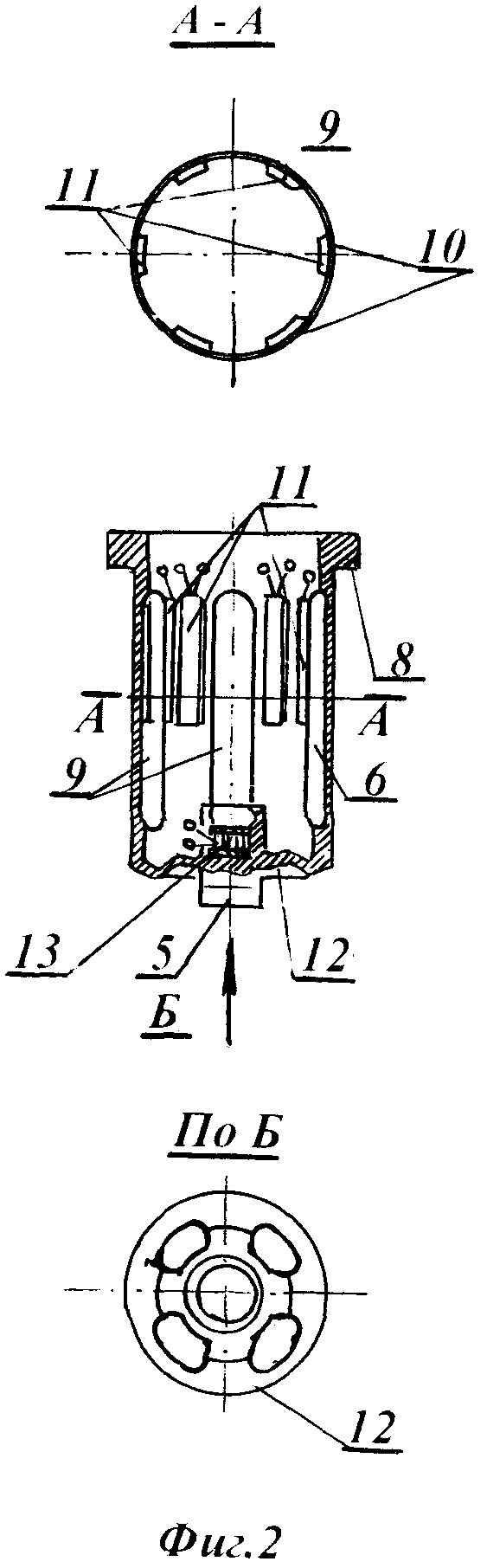
На фиг.1 представлен датчик в разрезе, на фиг.2 - вариант исполнения конструкции чувствительного элемента цилиндрической формы в разрезе; на фиг.3 - элементы конструкции датчика в увеличенном виде (виды I и II из фиг.1); на фиг.4 - положение датчика при написании текста; на фиг.5 - схема распределения нагрузок при написании текста; на фиг.6 - структурно-функциональная схема устройства.
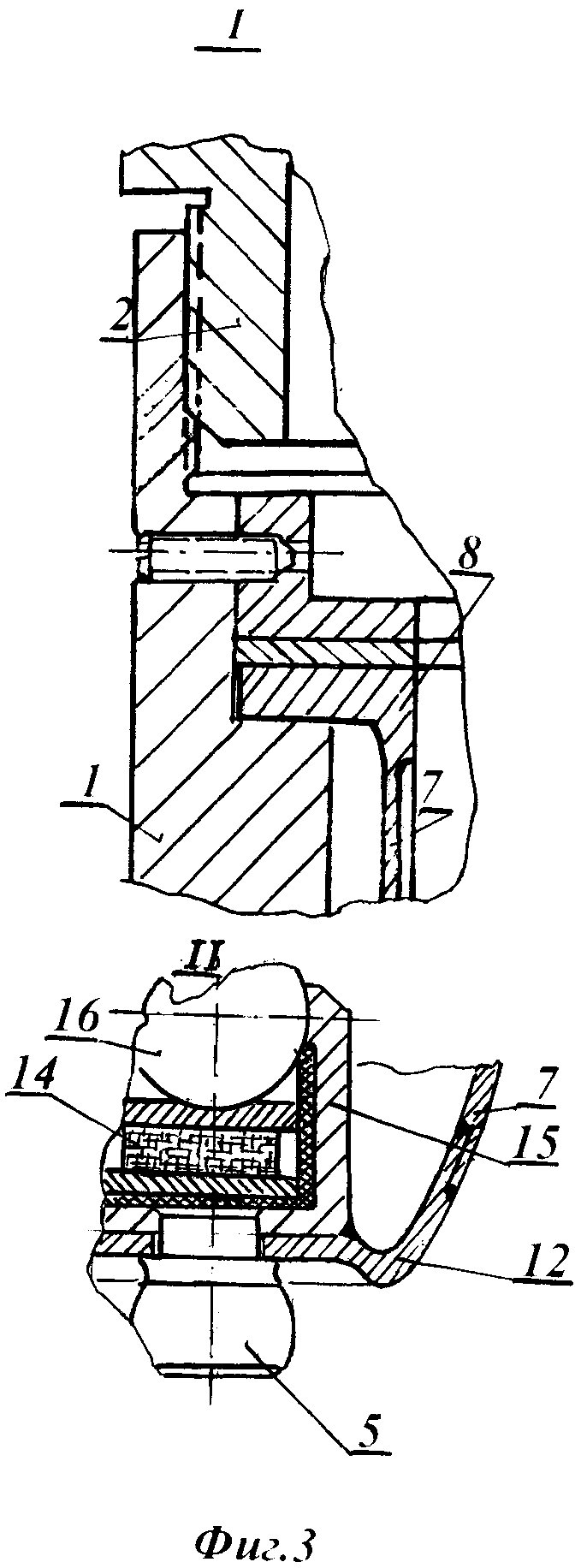
Датчик (фиг.1) содержит полый корпус 1, с крышкой 2, силоприемный элемент 3, выполненный в виде упругого полого цилиндрического стержня, с размещенным в его внутренней полости пишущим узлом 4. Крышка 2 соединяется с корпусом резьбой. Силоприемный элемент 3 прикреплен посредством втулки 5 к торцу чувствительного элемента 6 датчика, выполненного в виде тонкостенной оболочки вращения 7, защемленной в корпусе 1 со стороны опорного основания 8, с расположенными по образующим оболочки окнами 9 прямоугольной формы и с разделяющими их перемычками 10. Тонкостенная оболочка чувствительного элемента представляет собой тело вращения в виде усеченного полого параболоида вращения с расположенными по образующим прямоугольными окнами 9. Перемычки 10 с закрепленными на них тензодатчиками 11 радиальных перемещений образуют секции чувствительного элемента по направлениям радиальных перемещений. Тензодатчики 11 установлены в области наибольших радиальных деформаций перемычек вблизи места крепления чувствительного элемента к полому корпусу.
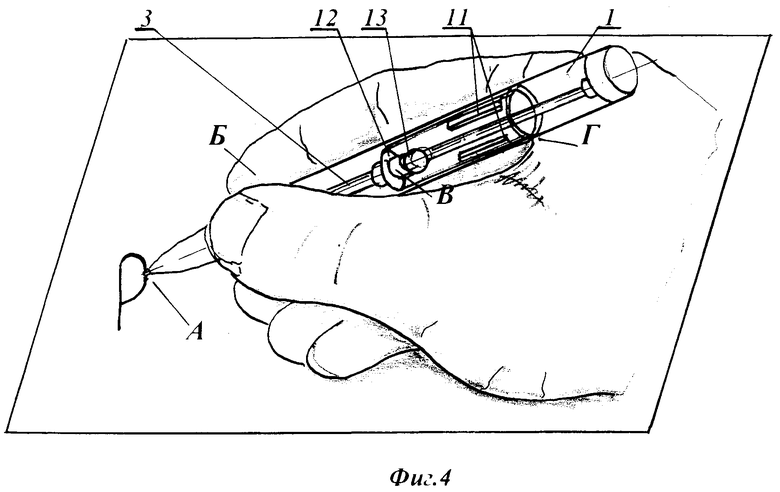
Возможно выполнение чувствительного элемента 6 в виде тонкостенного стакана цилиндрической формы (фиг.2), защемленного своим опорным основанием 8 в корпусе 1 датчика. Другое основание чувствительного элемента, в виде упругой мембраны 12 с жестким центром в виде втулки 5, соединено со стержнем силоприемного элемента 3 с возможностью совместного радиального перемещения. При написании рукописного текста корпус 1 датчика опирается в точке контакта пишущего узла 4 (А) (фиг.4), в месте зажима корпуса пальцами руки (Б) и в месте опирания корпуса датчика о кисть руки (Г). На фиг.4 точка В - место передачи усилий от силоприемного элемента к чувствительному элементу.
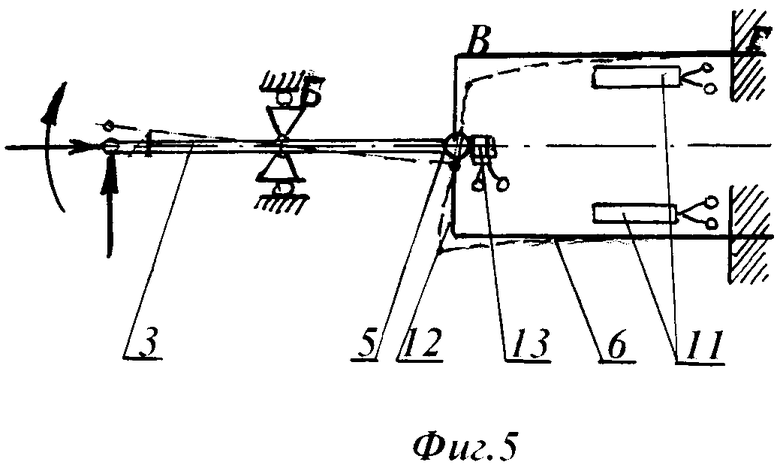
В силовой схеме датчика (фиг.5) силоприемный элемент 3 представляет собой консольную балку цилиндрического сечения, нагружаемую со стороны пишущего узла 4 сосредоточенными осевыми, радиальными нагрузками и моментом при контакте пишущего узла 4 о поверхность листа бумаги или другой поверхности. При написании рукописного текста передача нагрузок от силоприемного элемента 3 на чувствительный элемент 6 происходит через втулку 5 мембраны 12 (фиг.5). Тонкостенная оболочка чувствительного элемента с прямоугольными окнами и перемычками упруго деформируется по-разному, в зависимости от характера прилагаемой нагрузки, а поэтому по-разному нагружается каждая ее отдельная упругая перемычка 10 с закрепленными датчиками. Упругая система датчика (фиг.5), представляющая собой совокупность силоприемного элемента 3 с пишущим узлом 4, силопередающего элемента в составе втулки 5 и мембраны 12 и чувствительного элемента - тонкостенной оболочки 6 в форме усеченного параболоида вращения - позволяет оптимально передавать радиальные составляющие нагрузки упругим перемычкам 10 с закрепленными тензодатчиками 11. Принятая форма тонкостенной оболочки 7 чувствительного элемента 6 в виде усеченного параболоида вращения, защемленного большим основанием 8, позволяет реализовать выполнение упругих элементов 10 в виде балок равного сопротивления изгибу [1]. Для каждого направления радиального перемещения, для каждой отдельной перемычки 10 с тензодатчиком 11 собирается отдельный измерительный полумост, включенный в электрическую схему датчика. Для вывода проводников с тензодатчиков в корпусе используется внутренняя полость с контактными элементами (на чертежах не показана).
Для раздельного измерения давления пишущего узла 4 в осевом направлении, в него введен пьезодатчик 13 осевого перемещения, смонтированный в днище упругой мембраны 12 с внутренней стороны полости чувствительного элемента 6. Пьезоэлемент выполнен в виде диска из пьезокерамики 14 с электродами на торцах диска [2, 3]. Электроды датчика электрически связаны с входом измерительной схемы, а механически посредством втулки 15 и шарика 16 - с источниками статической и переменной нагрузок. При преобразовании сигнала осевого перемещения в электрические сигналы использован способ прямого пьезоэффекта, когда сигнал перемещения воздействует на пьезоэлемент и вызывает изменение электрического сигнала на выходе пьезодатчика. Для этого в конструкции датчика пьезоэлемент предварительно поджат с помощью винта 17 и пружины 18, а измеряемое осевое перемещение прикладывается через упругий преобразователь, которым является тонкостенная упругая мембрана 12. Пружина 18 с винтом 17 и шариком 16 предназначены для создания первоначального нерабочего усилия в контакте с пьезоэлементом 14 датчика осевого перемещения. При ввинчивании регулировочного винта 17 прогибается мембрана 12 и создается усилие, пропорциональное перемещению винта, от этого усилия в зоне соприкосновения шарика 16 и пьезоэлемента 14 возникает напряжение, пропорциональное предварительному нагружению.
Устройство работает следующим образом. После сборки в единое устройство происходит настройка измерительной аппаратуры и тарировка тензодатчиков радиальных перемещений и пьезодатчика осевого перемещения. Индивидуальная тарировка датчика каждого направления позволяет устранить погрешность измерений из-за технологических погрешностей сборки и отклонения параметров тензо- и пьезоэлементов. Каждый канал измерений тарируется индивидуально. Пьезодатчик 13 нагружается с помощью винта 17 предварительного нагружения. При совместном ввинчивании винта 17 и крышки корпуса 1 осевая нагрузка передается через шарик 16 на пьезоэлемент 14 и мембрану 12, прогибается тонкостенная мембрана 12, ее прогиб фиксируется регистрирующим прибором, уровень нагружения пьезоэлемента определяется сжатием пружины 18. Так фиксируется степень предварительного нагружения датчика осевого перемещения. Устройство по всем направлениям радиальных перемещений работает идентично, поэтому подробно рассмотрим его работу в направлении одной силочувствительной оси (плоскость чертежа на фиг.5). При перемещении пишущего узла 4 датчика, связанного посредством контакта с плоскостью листа бумаги или любой ровной поверхности при написании произвольного текста, например, в вертикальном направлении, консольная часть силоприемного стержня 3 совместно с пишущим узлом 4 перемещается вверх, а элемент передачи усилия в виде мембраны 12 чувствительного элемента 6, упруго деформируясь, воздействует на тонкостенную оболочку параболоида, при этом упругие перемычки 10 вместе с тензодатчиками 11 деформируются по-разному в зависимости от места нахождения датчика на образующей поверхности параболоида. Величина прогиба упругих перемычек 10 пропорциональна радиальной составляющей перемещения в данной точке радиального сечения. Тензодатчики 11, размещенные в зоне максимальных деформаций упругих перемычек 10, реагируют на этот прогиб изменением сопротивления и соответствующим изменением выходного напряжения в измерительной диагонали полумоста, которое регистрируется прибором. При написании текста в зависимости от особенностей почерка нагружение тензодатчиков радиальных перемещений 11 и пьезодатчика 13 осевого перемещения вызывает появление электрических сигналов на входе в электрическую схему устройства. Электрический сигнал по каждому каналу усиливается в многоканальном тензоусилителе 19 типа «Топаз - 3 (4)» и попадает на вход фильтра 20, в котором подавляются высокочастотные помехи. Электрический сигнал с выхода фильтра подается на вход аналогово-цифрового преобразователя (АЦП) 21, в котором происходит оцифровка полезного сигнала с необходимой дискретностью во времени. Оцифрованный сигнал поступает на микроконтроллер 22 и далее посредством преобразователя интерфейса (UART/RS - 485) 23 на ПЭВМ 24 для создания массива данных в цифровой форме для последующей обработки.
Предлагаемое техническое решение обладает рядом преимуществ, обеспечивающих положительный эффект:
- позволяет создать малогабаритное устройство в виде пишущей ручки;
- позволяет снимать характеристики перемещения пишущего узла при написании рукописного текста для последующей статистической обработки;
- таким же образом в память компьютер можно переносить графическую информацию в виде рисунков, графиков и схем.
Таким образом, в расширении функциональных возможностей устройства за счет избирательного по всем направлениям пространства, измерения перемещений пишущего узла с их последующей оцифровкой конкретно выражается положительный эффект предлагаемого устройства.
Источники информации
1. Двухкомпонентный силоизмерительный датчик (SU №1046628 от 07.10.83, G01L 1/14).
2. Фесенко Е.Г. и др. Новые пьезокерамические материалы. - Ростов-на-Дону: изд. Ростовского ГУ, 1983. - с.18.
3. Пьезоэлектрический преобразователь (RU №2189668 от 20.09.2002, H01L 41/08).
| название | год | авторы | номер документа |
|---|---|---|---|
| ЦИФРОВОЙ МНОГОКОМПОНЕНТНЫЙ ДАТЧИК ПЕРЕМЕЩЕНИЙ | 2011 |
|
RU2500986C2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ПИШУЩЕГО УЗЛА | 2011 |
|
RU2475699C2 |
| МНОГОКОМПОНЕНТНЫЙ ДАТЧИК ПЕРЕМЕЩЕНИЙ | 2011 |
|
RU2476838C2 |
| РУЧКА ДЛЯ ВВОДА РУКОПИСНОЙ И ГРАФИЧЕСКОЙ ИНФОРМАЦИИ В ЭВМ "SHELPEN" (ВАРИАНТЫ) | 1992 |
|
RU2073907C1 |
| РУЧКА ДЛЯ РУКОПИСНОГО ВВОДА ДАННЫХ В КОМПЬЮТЕР | 2001 |
|
RU2235362C2 |
| МНОГОКОМПОНЕНТНЫЙ ДАТЧИК ПЕРЕМЕЩЕНИЙ | 2009 |
|
RU2422785C1 |
| РУЧКА ДЛЯ ВВОДА РУКОПИСНОЙ И ГРАФИЧЕСКОЙ ИНФОРМАЦИИ В КОМПЬЮТЕР "SHELPEN III" | 1998 |
|
RU2166796C2 |
| СПОСОБ БИОМЕТРИЧЕСКОЙ АУТЕНТИФИКАЦИИ ПО ПОЧЕРКУ В КОМПЬЮТЕРИЗИРОВАННОЙ СИСТЕМЕ КОНТРОЛЯ ДОСТУПА | 2011 |
|
RU2469397C1 |
| Перо для ввода рукописных символов | 1988 |
|
SU1695340A1 |
| ДАТЧИК АКУСТИЧЕСКОГО ДАВЛЕНИЯ | 1992 |
|
RU2043610C1 |
Изобретение относится к устройствам для измерения деформаций и перемещений и предназначено для измерения статических или плавно меняющихся перемещений. Техническим результатом изобретения является расширение функциональных возможностей устройства за счет избирательного по всем направлениям пространства измерения статических или плавно меняющихся перемещений с их последующей оцифровкой. Цифровой многокомпонентный датчик перемещений содержит полый корпус, силоприемный элемент, выполненный в виде полого стержня с установленным в нем пишущим узлом, чувствительный элемент, выполненный в виде тонкостенной оболочки в форме усеченного полого параболоида вращения с расположенными по образующим прямоугольными окнами, а разделяющие их перемычки представляют собой упругие элементы в виде балок с наклеенными на них тензодатчиками радиальных перемещений, с датчиками перемещений, включенными в электрическую схему, а малое сечение оболочки параболоида выполнено в виде упругой мембраны с жестким центром в виде втулки с размещенным в ней пьезодатчиком осевого перемещения. 6 ил.
Цифровой многокомпонентный датчик перемещений, содержащий полый корпус, силоприемный элемент в виде упругого цилиндрического стержня, пишущий узел, чувствительный элемент с датчиками перемещений, включенными в электрическую схему, отличающийся тем, что силоприемный элемент в виде полого стержня с установленным в нем пишущим узлом соединен торцом с чувствительным элементом, выполненным в виде тонкостенной оболочки вращения, защемленной большим опорным основанием в корпусе датчика, причем стержень силоприемного элемента с пишущим узлом шарнирно закреплен в выходной части корпуса с возможностью осевого перемещения и поворота, при этом ось пишущего узла совпадает с продольной осью датчика, тонкостенная оболочка чувствительного элемента выполнена в виде усеченного полого параболоида вращения с расположенными по образующим прямоугольными окнами, а разделяющие их перемычки представляют собой упругие элементы в виде балок с наклеенными на них в зоне наибольших деформаций тензодатчиками радиальных перемещений, причем прямоугольные окна выполнены в виде прорезей минимальной ширины, увеличивающих количество разделяющих их перемычек, в зоне наибольших деформаций у большого сечения параболоида вращения, упомянутая тонкостенная оболочка в своем меньшем сечении соединена с силоприемным элементом с возможностью радиального и осевого перемещения, малое сечение оболочки параболоида выполнено в виде упругой мембраны с жестким центром в виде втулки с размещенным в ней пьезодатчиком осевого перемещения, а элемент передачи осевого перемещения пишущего узла выполнен в виде шарика, контактирующего с пьезоэлементом, в качестве которого использован пьезоэлемент прямого эффекта перемещений, причем ось чувствительности пьезоэлемента совпадает с продольной осью датчика.
| МНОГОКОМПОНЕНТНЫЙ ДАТЧИК СИЛОВЫХ ВОЗДЕЙСТВИЙ | 2003 |
|
RU2251670C2 |
| РУЧКА ДЛЯ ВВОДА РУКОПИСНОЙ И ГРАФИЧЕСКОЙ ИНФОРМАЦИИ В КОМПЬЮТЕР "SHELPEN III" | 1998 |
|
RU2166796C2 |
| RU 2009140648 А, 02.11.2011 | |||
| US 6038933 А, 21.03.2000 | |||
| US 5821432 А, 13.10.1998. | |||

