IN3
4 Од
Изобретение относится к измерительной технике и может быть использовано для контроля перемещения и линейных размеров.
Цель изобретения - повьппение надежности путем автоматического поиска и слежения за объектом контроля.
На чертеже представлена принципиальная схема преобразователя, .д
Пневмоэлектрический преобразователь перемещения содержит ротаметр с трубкой 1 и поплавком 2, систему, следящую за поплавком ротаметра, с кареткой 3, электроприводом 4 и фото- г преобразователями, состоящими из источников 5 и 6 света, фотодиодов 7 и 8 и фотоусилителей 9 и 10, и блок ормирования команд, включающий элементы ИПИ-НЕ 11 и 12, конечные вык- 20 ючатели 13 и 14, элементы 2И-НЕ 15 и 16 и усилители 17 и 18 мощности, пе- ременньй резистор 19 и электронный преобразователь 20 сопротивления.
Каретка 3 перемещается электро- 25 риводом 4 вдоль трубки 1 и несет источники 5 и 6 света, смонтированные с одной стороны трубкиJ и фотодиоды 7 и 8, смонтированные с другой ее стороны. Движок резистора 19 кинема- ,,, тически связан с кареткой 3, а выход резистора соединен с преобразователем 20.
Фотодиоды подключены к фотоусили- талям 9 и 10, выходы которых подсоединены к первым входам соответственно элементов ИЛИ-НЕ 11 и 12. А другие входы элементов 11 и 12 соединены соответственно с конечными выключа- телями: выключателем 14 расположен- .,. ным на нижнем конде трубки 1, и выключателем 13, расположенным на верхнем конце трубки 1 так, что каждый из элементов 11 и 12 соединен с фотопреобразователем и конечным вы- -дс ключателем, расположенными по разные стороны от середины поплавка 2,
Выходы элементов ИЛИ-НЕ 11 и 12 соединены соответственно с первьши входами элементов 2И-НЕ 15 и 16, вы-, ходы которых подключены соответственно через усилители 17 и 18 мощности к-электроприводу 4 и вторым входам друг друга, Переменньй резистор 19 кинематически связан с кареткой 3,
Расстояние между верхним 7 и нижним 8 фотодиодами и соответствующими источниками 5 и 6 света и высота поплавка 2 выбраны с таким расчетом,
35
д
г 0
5 ,,
,. с
5
что фотодиоды полностью перекрьгеа- ются поплавком 2 и малейшего перемещения последнего достаточн о, чтобы луч от одного из источников 5 или 6 света попал.на соответствующий фотодиод 7 или 8, При включении питания оба фотодиода 7 и 8 могут быть возбуждены источниками 5 и 6 света (случай, когда каретка 3 расположена вне зоны поплавка 2). Тогда на выходах фотоусилителей 9 и 10 будет сигнал, равный логическому О, и электропривод 4 поведет каретку 3 случайным образом к любому из конечных выключателей 13 и 14, причем возможны три случая привязки каретки 3 к поплавку 2. В первом случае, если каретка 3 находится между поплавком 2 и выключателем, каретка пе ремещается к конечному выключателю, натгример нижнему 14, достигнув его, меняет направление на обратное и при перемещении вверх фотопреобразо - ва телями захватьгоает поплавок 2, привязывая к нему каретку 3, Во втором случае каретка 3 перемещается в сторону поплавка 2, тогда она, не меняя направления своего движения, захватит поплавок 2 на своем прямом ходе и далее отслеживает его положение, В третьем случае, при отсутствии поплавка 2 между конечными выключателями 13 и 14, каретка 3 будет совершать возвратное перемещение между ними до появления поплавка 2 в границах измеряемого размера.
Работа блока формирования команд в первом случае осуществляется следующим образом,
Поплавок 2 находится между выклю- чателями 13 и 14 и не затемняет фотодиодов 7 и 8, каретка 3 не касается выключателей 13 и 14. Фотодиоды 7 и
8возбуждены, на выходах усилителей
9и 10 и первых входах элементов 11 и 12 будут логические О, с выходов выключателей 13 и 14 на вторые входы элементов 12 и 11 соответственно поступят также логические О. В итоге
с выходов элементов 11 и 12 на первые входы элементов 15 и 16 поступают логические 1, выходы элементов 15 и 16 находятся случайным образом в состоянии , или , , следовательно, электропривод 4, за- питанный от усилителей 17 и 18 мощности, будет перемещать каретку 3 соответственно вниз или вверх. Если
каретка 3 при своем перемещении вверх или вниз встретит конечный выключатель 13 или 14, то на вторые входы элементов 12 или 11 поступит логическая 1, а логический О с выходов элементов 11 или 12 изменит соответственно состояние выходов с , на А 1, или с , на , , направление вращения электропривода 4 изменится. Если каретка 3 при своем перемещении вниз или вверх встретит поплавок 2, то затемнение соответственно фотодиода 7 или 8 не изменит состояния выходов элементов 15 и 16. При дальнейшем перемещении каретки 3 затемнятся оба фотодиода 7 и 8, на первых входах элементов 11 и 12 будут логические 1, с выхода элементов 11 и 12 логические О поступают на первые входы элементов 15 и 16, устанавливая выходы в состояние , ,,. Высокий уровень напряжения на выходах усилителей 17 и 18 мощности останавливает электропривод 4, блок формирования сигналов переключения переходит в режим слежения за положением поплавка 2
В других, случаях блок формирования команд работает аналогично.
Каретка 3 перемещает движок резистора 19, что приводит к изменению электрического сигнала преобразователя 20.
д
0
5
0
Таким образом, сканирование каретки 3 на этапе поиска поплавка 2 позволяет /ювысить надежность его захвата и последующего слежения за положением поплавка 2.
Формула изобретения
Пневмоэлектрический преобразователь перемещения, содержащий ротаиетр следующую за поплавком ротаметра систему с кареткой, нес-ущей фотопреЬбра- зователи, электроприводом каретки и блоком формирования команд, вход которого связан с фотопреобразователями, а выход-с Электроприводом, отличающийся тем, что, с целью повышения надежности, он снабжен конечными вьжлючателями, расположенными на концах трубки ротаметра, а блок формирования команд вьтолнен в виде усилителей, двух элементов ИЛИ-НЕ и двух элементов 2И-НЕ, первые входы которых соединены с выходами элементов ИЖ-НЕ, а второй вход каждого из элементов 2И-НЕ соединен с выходом другого элемента 2И-НЕ и через усилитель - с электроприводом, а входы каждого из элементов ИЛИ-НЕ соединены с одним фотопреобразователем и с распо- .ложенным по другую сторону от середины поплавка конечным выключателем.
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящий уровнемер | 1987 |
|
SU1553841A1 |
| Устройство для трансформирования снимков | 1979 |
|
SU859814A1 |
| Электропривод | 1990 |
|
SU1830611A1 |
| РОТАМЕТР | 2000 |
|
RU2200935C2 |
| СИСТЕМА АВТОМАТИЧЕСКОГО ПЕРЕКЛЮЧЕНИЯ ПЕРЕДАЧ СТУПЕНЧАТОЙ ТРАНСМИССИИ ТРАНСПОРТНОГО СРЕДСТВА | 2003 |
|
RU2259505C1 |
| Стенд для сборки и сварки продольных швов | 1988 |
|
SU1540995A1 |
| Электропривод переменного тока | 1985 |
|
SU1292155A1 |
| Индуктивный следящий уровнемер | 1980 |
|
SU939949A1 |
| Система измерения температуры | 1985 |
|
SU1247835A1 |
| РОТАМЕТР | 2001 |
|
RU2265806C2 |
Изобретение относится к измерительной технике и может быть использовано для преобразования перемещения в электрический сигнал. Цель изобретения - повышение надежности путем автоматического поиска и последующего слежения за поплавком 2, Каретка 3 с фотодиодами 7 и 8 перемещается электроприводом 4 по командам, формируемым двумя конечными выключателями 13 и 14, двумя элементами ИЛИ-НЕ 11 и 12 и двумя элементами 2И-НЕ 15 и 16, С кареткой кинематически связан движок переменного резистора 19, который с помощью электрического преобразователя 20 обеспечивает на выходе сигнал, пропорциональный положению поплавка. 1 ил.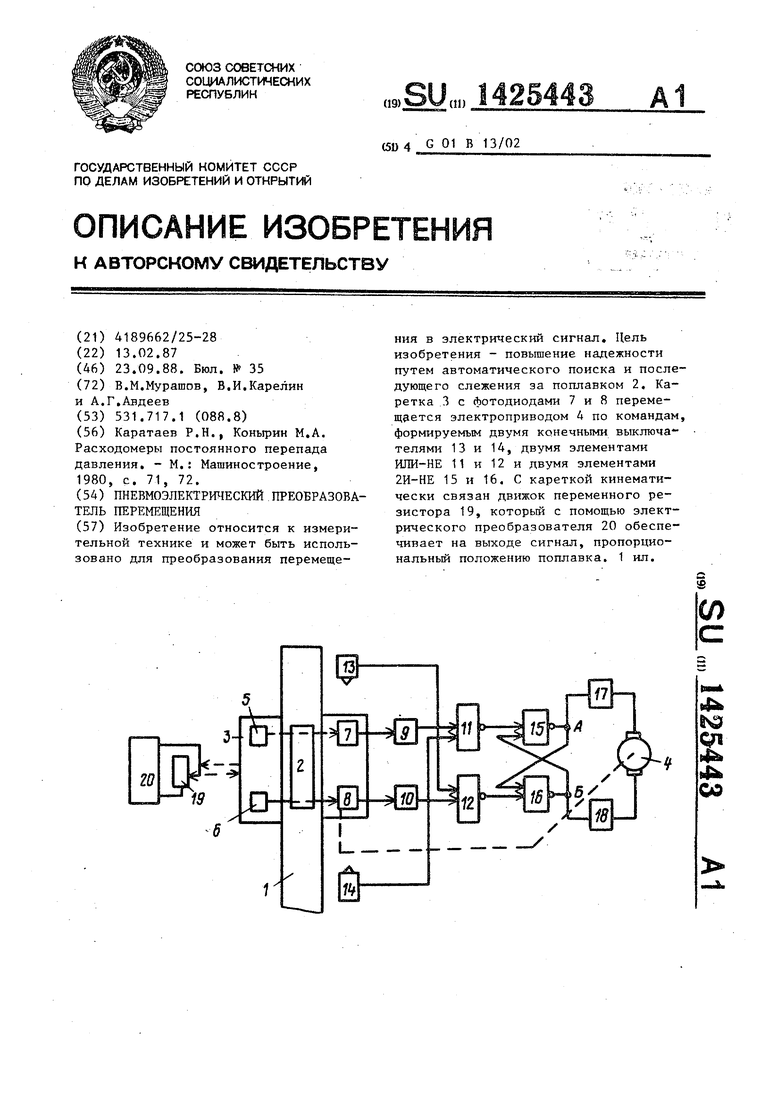
| Каратаев Р.Н., Коньфин М.А | |||
| Расходомеры постоянного перепада давления, - М.: Машиностроение, 1980, с | |||
| Контрольный стрелочный замок | 1920 |
|
SU71A1 |
