о
Изобретение относится к электротехнике и может быть использовано в электроприводах с вентильным электродвигателем.
Целью изобретения является повышение энергетических показателей путем снижения динамических потерь и потерь на вихревые токи и гистерезис.
На фиг. 1 представлена блок-схема вентильного электропривода с числом п обмоток якоря, равным трем, на |фиг.2 - эпюры напряжений, поясняющие ;работу вентильного электропривода.
соединен с первым входом второго логического сумматора 25 и через пер- вьй одновибратор 18 - с первыми входами третьего 26, четвертого 27 логических сумматоров, выход четвертого порогового элемента () соединен со вторым входом третьего логического сумматора 26 и через второй одновибратор 19 - со вторыми входами второго 25 и четвертого 27 логических сумматоров, выход шестого порогового элемента () 17 подключен к третьему входу четвертого логичес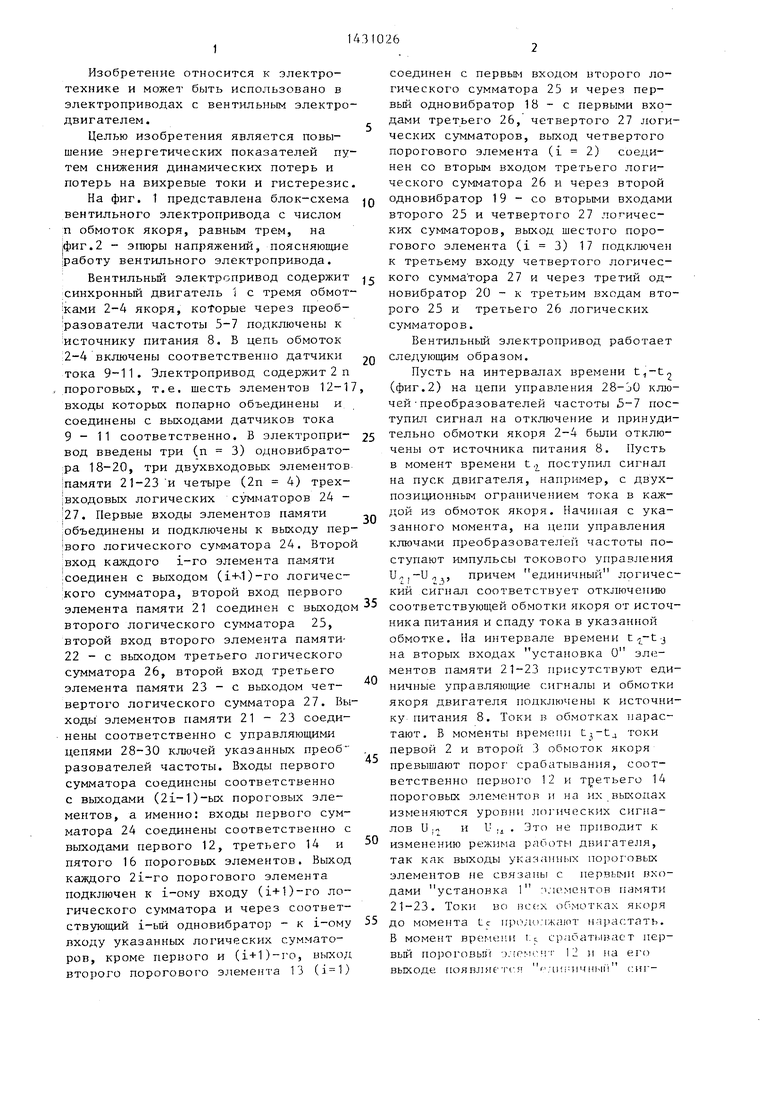
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления вентильным электродвигателем | 1985 |
|
SU1302413A2 |
| Реверсивный вентильный электродвигатель с регулируемым торможением | 1985 |
|
SU1283928A1 |
| Вентильный электродвигатель | 1984 |
|
SU1241364A1 |
| Вентильный электродвигатель | 1985 |
|
SU1354351A1 |
| Вентильный электродвигатель с токовым регулированием | 1989 |
|
SU1677807A2 |
| Вентильный электродвигатель с токовым регулированием | 1987 |
|
SU1494188A1 |
| Способ управления вентильным электродвигателем | 1986 |
|
SU1415348A1 |
| Устройство для управления электроприводом транспортного средства с тяговыми двигателями, преимущественно независимого возбуждения | 1990 |
|
SU1766726A1 |
| Реверсивный вентильный электродвигатель с регулируемым торможением | 1988 |
|
SU1700703A1 |
| Вентильный электродвигатель | 1989 |
|
SU1677839A2 |
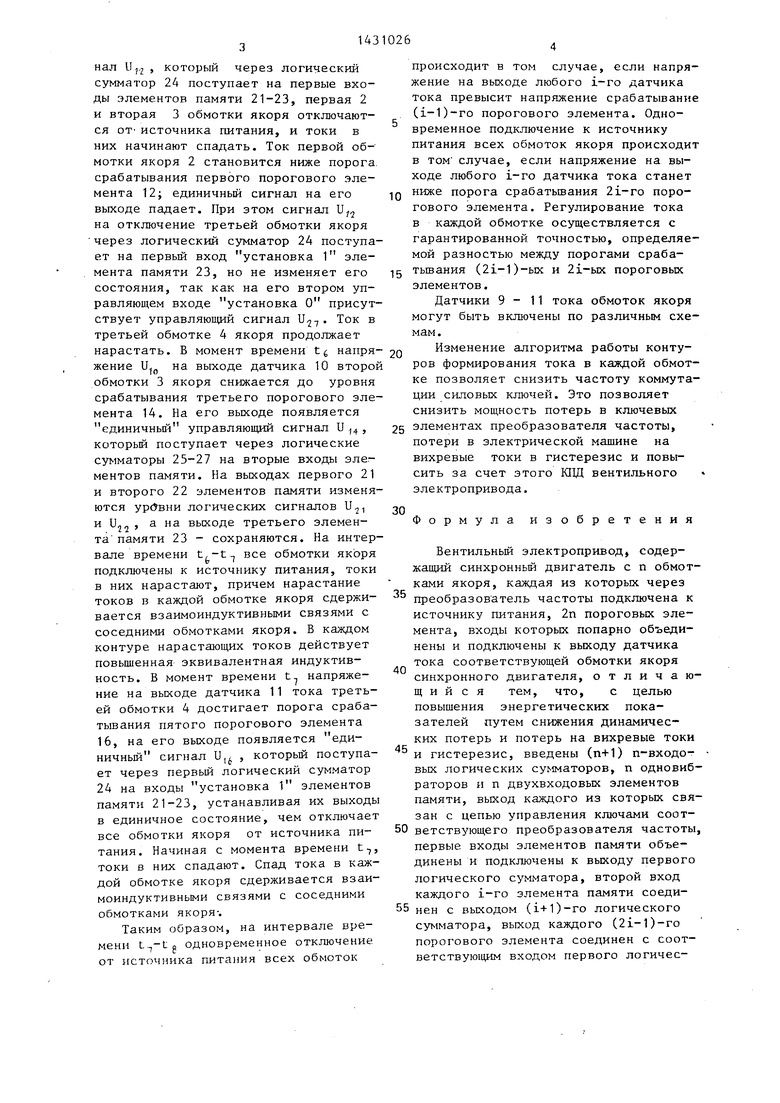
Изобретение относится к электротехнике. Целью изобретения является повышение энергетических показателей путем снижения динамических потерь и потерь на вихревые токи и гистерезис. В вентильном электроприводе обмотки 2-4 якоря синхронного двигателя 1 питаются от источника 8 через преобразователи частоты 5-7. Входы пороговых элементов 12-17 попарно объединены и соединены с вы- ,ходами датчиков тока 9-11. В вентильный электропривод введены одновибра- торы 18-20, элементы памяти 21-23 и логические сумматоры 24-27. Первые входы элементов памяти 21-23 подключены к выходу сумматора 24. Выходы сумматоров 25-27-соединены соответственно со вторыми входами элементов памяти 21-23, выходы которых подключены к управляющим цепям 28-30 ключей преобразователей частоты 5-7. Одновибраторы 18-20 организуют связь пороговых элементов 12-17 с сумматорами 25-27 соответственно. В устройстве обеспечивается одновременное отключение обмоток якоря от источника питания в том случае, если напря- яение любого датчика превысит порог срабатывания.одной группы пороговых элементов, а их одновременное подключение к источнику питания происходит по достижении напряжения любого датчика тока величины, меньшей порога срабатывания другой группы пороговых элементов. 2 ил. и (Л 4 ОО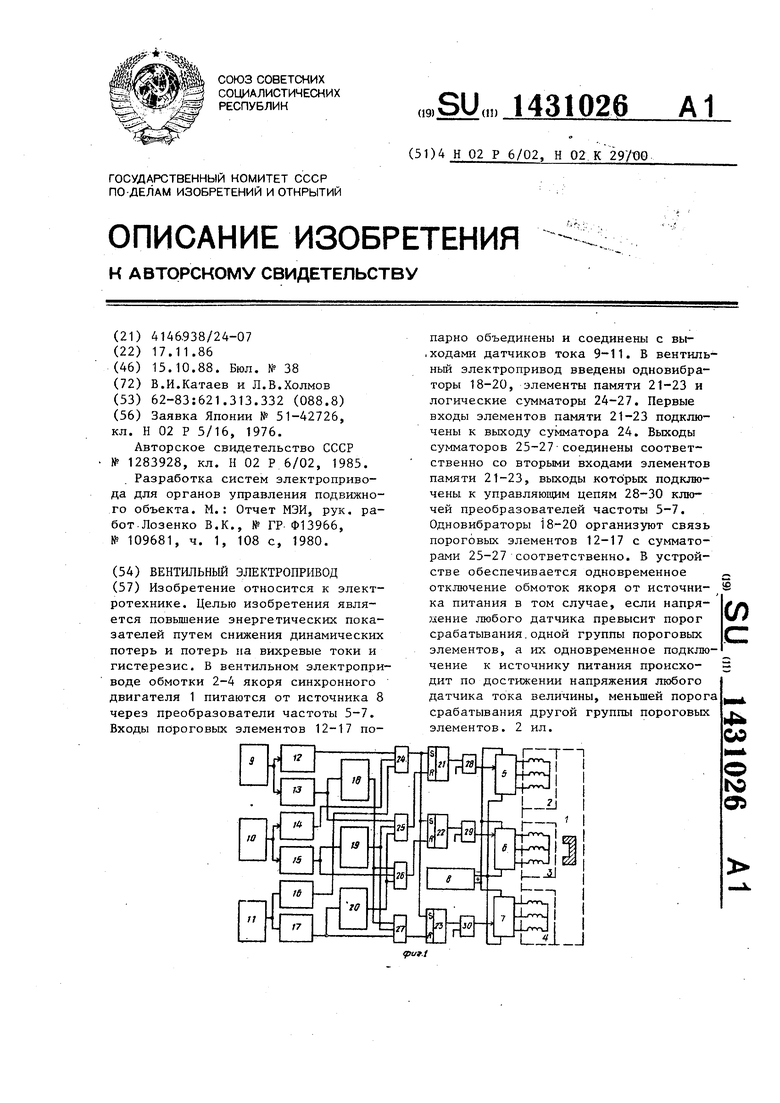
Вентильньй электропривод содержит кого сумматора 27 и через третий од20
25
30
синхронный двигатель 1 с тремя обмот- ками 2-4 якоря, которые через преобразователи частоты 5-7 подключены к источнику питания 8, В цепь обмоток ;2-4 включены соответственно датчики тока 9-11. Электропривод содержит 2 п пороговых, т.е. шесть элементов 12-17, входы которых попарно объединены и соединены с выходами датчиков тока 9-11 соответственно. В электропривод введены три (п 3) одновибрато- ра 18-20, три двухвходовых элементов ;памяти 21-23 и четыре (2п 4) трех- 1ВХОДОВЫХ логических сумматоров 24 - ;27. Первые входы элементов памяти |объединены и подключены к выходу пер- |вого логического сумматора 24. Второй |вход каждого i-ro элемента памяти ;СОединен с выходом (1+ч1)-го логичес- кого сумматора, второй вход первого элемента памяти 21 соединен с выходом- второго логического сумматора 25, второй вход второго элемента памяти- 22 - с выходом третьего логического сумматора 26, второй вход третьего элемента памяти 23 - с выходом четвертого логического сумматора 27. Выходы элементов памяти 21-23 соединены соответственно с управляющими цепями 28-30 ключей указанных преоб разователей частоты. Входы первого сумматора соединены соответственно с выходами (2i-1) пороговых элементов, а именно: входы первого сумматора 24 соединены соответственно с выходами первого 12, третьего 14 и пятого 16 пороговых элементов. Выход каждого 2i-ro порогового элемента подюшчен к i-ому входу (i+1)-ro логического сумматора и через соответствующий i-ый одновибратор - к i-ому входу указанных логических сумматоров, кроме первого и (i+1)-ro, выход второго пороговот о элемента 13 (i 1)
40
45
50
55
новибратор 20 - к третьим входам второго 25 и третьего 26 логических сумматоров.
Вентильньш электропривод работает cлeдyюш м образом.
Пусть на интервалах времени t,-t2 (фиг.2) на цепи управления 28-jQ ключей-преобразователей частоты 5-7 поступил сигнал на отключение и принудительно обмотки якоря 2-4 были отключены от источника питания 8. Пусть в момент времени t,, поступил сигнал на пуск двигателя, например, с двух- позиционным ограничением тока в каждой из обмоток якоря. Начиная с указанного момента, на цепи управления ключами преобразователей частоты поступают импульсы токового управления U J-UT-, причем единичный кий сигнал соответствует отключению соответствующей обмотки якоря от источника питания и спаду тока в указанной обмотке. На интервале времени t -t .j на вторых входах установка О элементов памяти 21-23 присутствуют единичные управляю1цие сигналы и обмотки якоря двигателя подключены к истс)чни- ку питания В. Токи в обмотках нарастают. В моменты времени токи первой 2 и второй 3 обмоток якоря превышают порог срабатывания, соответственно первого 12 и TjjeTbero 14 пороговых элементов и на их выхоиах изменяются уровни логических сигналов и ;
и
Это не приводит к
изменению работы двигателя, так как выходы указанных порсзг овых элементов не связаны с иервьми входами установка 1 .члементов памяти 21-23. Токи во nct;x обмотках якстря до момента tc прс дскчжают нарастать. В момент времени . срабаты1 аст пер- вьй HoporoBbrif элрмо П 2 и яа ei o выходе появлиб Ч с.я с.чипичныГ сиг0
5
0
0
5
новибратор 20 - к третьим входам второго 25 и третьего 26 логических сумматоров.
Вентильньш электропривод работает cлeдyюш м образом.
Пусть на интервалах времени t,-t2 (фиг.2) на цепи управления 28-jQ ключей-преобразователей частоты 5-7 поступил сигнал на отключение и принудительно обмотки якоря 2-4 были отключены от источника питания 8. Пусть в момент времени t,, поступил сигнал на пуск двигателя, например, с двух- позиционным ограничением тока в каждой из обмоток якоря. Начиная с указанного момента, на цепи управления ключами преобразователей частоты поступают импульсы токового управления U J-UT-, причем единичный кий сигнал соответствует отключению соответствующей обмотки якоря от источника питания и спаду тока в указанной обмотке. На интервале времени t -t .j на вторых входах установка О элементов памяти 21-23 присутствуют единичные управляю1цие сигналы и обмотки якоря двигателя подключены к истс)чни- ку питания В. Токи в обмотках нарастают. В моменты времени токи первой 2 и второй 3 обмоток якоря превышают порог срабатывания, соответственно первого 12 и TjjeTbero 14 пороговых элементов и на их выхоиах изменяются уровни логических сигна
лов и ;
и
Это не приводит к
изменению работы двигателя, так как выходы указанных порсзг овых элементов не связаны с иервьми входами установка 1 .члементов памяти 21-23. Токи во nct;x обмотках якстря до момента tc прс дскчжают нарастать. В момент времени . срабаты1 аст пер- вьй HoporoBbrif элрмо П 2 и яа ei o выходе появлиб Ч с.я с.чипичныГ сиг
нал и,,2 , который через логический сумматор 24 поступает на первые входы элементов памяти 21-23, первая 2 и вторая 3 обмотки якоря отключаются ОТ источника питания, и токи в них начинают спадать. Ток первой обмотки якоря 2 становится ниже порога срабатывания первого порогового элемента 12; единичный сигнал на его выходе падает. При этом сигнал U на отключение третьей обмотки якоря через логический сумматор 24 поступает на первый вход установка 1 элемента памяти 23, но не изменяет его состояния, так как на его втором управляющем входе установка О присутствует управляющий сигнал , . Ток в третьей обмотке 4 якоря продолжает нарастать. В момент времени t напря- жение на выходе датчика 10 второй обмотки 3 якоря снижается до уровня срабатывания третьего порогового элемента 14. На его выходе появляется единичньп1 управляющий сигнал U 4 которьй поступает через логические сумматоры 25-27 на вторые входы элементов памяти. На выходах первого 21 и второго 22 элементов памяти изменяются уровни логических сигналов U,,
и Uj. , а на выходе третьего элемента памяти 23 - сохраняются. На интервале времени t,-t все обмотки як оря подключены к источнику питания, токи в них нарастают, причем нарастание
Формула изобретения
Вентильньш электропривод, содержащий синхронньш двигатель с п обмот ками якоря, каждая из которых через
токов в каждой обмотке якоря сдержи- - преобразов атель частоты подключена к
вается взаимоиндуктивньп и связями с соседними обмотками якоря. В каждом контуре нарастающих токов действует повышенная эквивалентная индуктивность. В момент времени t напряжение на выходе датчика 11 тока третьей обмотки 4 достигает порога срабатывания пятого порогового элемента 16, на его выходе появляется еди- ничньш сигнал U, , который поступает через первый логический сумматор 24 на входы установка 1 элементов памяти 21-23, устанавливая их выходы в единичное состояние, чем отключает все обмотки якоря от источника питания. Начиная с момента времени t,, токи в них спадают. Спад тока в каждой обмотке якоря сдерживается взаимоиндуктивными связями с соседними обмотками якоря-.
Таким образом, на интервале времени L-,-to одновременное отключение от источника питания всех обмоток
0
происходит в том случае, если напряжение на выходе любого i-ro датчика тока превысит напряжение срабатывание (i-l)-ro порогового элемента. Одновременное подключение к источнику питания всех обмоток якоря происходит в том случае, если напряжение на выходе любого i-ro датчика тока станет ниже порога срабатьтания 2i-ro порогового элемента. Регулирование тока в каждой обмотке осуществляется с гарантированной точностью, определяемой разностью между порогами сраба5 тьшания (2i-1)-bix и 2i-bK пороговых элементов.
Датчики 9-11 тока обмоток якоря могут быть включены по различным схемам.
Изменение алгоритма работы контуров формирования тока в каждой обмотке позволяет снизить частоту коммутации силовых ключей. Это позволяет снизить мощность потерь в ключевых
5 элементах преобразователя частоты, потери в электрической машине на вихревые токи в гистерезис и повысить за счет этого КПД вентильного электропривода.
20
30
Формула изобретения
Вентильньш электропривод, содержащий синхронньш двигатель с п обмотками якоря, каждая из которых через
0
5
источнику питания, 2п пороговых элемента, входы которых попарно объединены и подключены к выходу датчика тока соответствующей обмотки якоря синхронного двигателя, о т л и ч а ю- щ и и с я тем, что, с целью повышения энергетических показателей путем снижения динамических потерь и потерь на вихревые токи и гистерезис, введены (п+1) п-входо- вых логических сумматоров, п одновиб- раторов и п двухвходовых элементов памяти, выход каждого из которых связан с цепью управления ключами соот0 ветствующего преобразователя частоты, первые входы элементов памяти объединены и подключены к выходу первого логического сумматора, второй вход каждого 1-го элемента памяти соеди5 нен с выходом (i+l)-ro логического сумматора, выход каждого (2i-1)-ro порогового элемента соединен с соот- ветствую1цим входом первого логического сумматора, выход каждого 2i-ro порогового элемента подключен к i-му входу (i+1)-ro логического сумматора
и,о
и„
и.
и.
п.и.зе
и„
tt ttttttffs fr
и через соответствующий i-й одно- вибратор к i-му.входу логических сумматоров, кроме первого и (i+1)-ro,
| Способ запрессовки не выдержавших гидравлической пробы отливок | 1923 |
|
SU51A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Реверсивный вентильный электродвигатель с регулируемым торможением | 1985 |
|
SU1283928A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Разработка систем электропривода для органов управления подвижного объекта | |||
| М | |||
| : Отчет МЭИ, рук | |||
| работ.Лозенко В.К., № ГР Ф13966, № 109681, ч | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
