Изобретение относится к средствам автоматизации и может быть использовано для построения автоколебательных самонастраивающихся систем (СНС) с одновременной стабилизации амплитуды и частоты автоколебаний.
Автоколебательные СНС относятся к классу беспоисковых адаптивных СНС с настройкой по временным характеристикам и широко распространены на практике и достаточно хорошо изучены [1]
Наиболее близким по технической сути к заявляемому является устройство, обеспечивающее эффективную стабилизацию амплитуды автоколебаний при ее отклонении от задания под действием случайных сигнальных возмущений. В основу устройства положен релейный регулятор с отрицательным гистерезисом, ширина которого при отклонении амплитуды от задания изменяется по закону -γ(t)(A(t)-Ao), γ(t)
-γ(t)(A(t)-Ao), γ(t)  где Х ширина зоны гистерезиса;
где Х ширина зоны гистерезиса;
t время;
γo постоянная величина,
to > 0.
Конструкция устройства обеспечивает стабилизацию только амплитуды автоколебаний [2]
Цель изобретения стабилизация как амплитуды, так и частоты автоколебаний в системе, при отклонении их от задания под действием как сигнальных, так и параметрических возмущений.
Эта цель достигается тем, что в устройстве, содержащем индикатор экстремумов, вход которого соединен с каналом регулируемой переменной, пять реле переключения, входы первого из которых связаны с выходами индикатора экстремумов, два сумматора, первый из которых входами подключен к выходу первого реле переключения и каналу задания регулируемой переменной, два элемента сравнения, вторые входы которых связаны с каналом регулируемой переменной, два интегратора разности двух сигналов, генератор пилообразных колебаний, три повторителя-усилителя, схему, реализующую логическую функцию НЕРАВНОЗНАЧНОСТЬ, два суммирующих усилителя, задатчик, блок выделения модуля разности двух сигналов и четыре дросселя, первый вход второго элемента сравнения соединен с каналом задания регулируемой переменной, а выход подключен к первому входу логической схемы НЕРАВНОЗНАЧНОСТЬ, второй вход которой соединен с дискретным выходом индикатора экстремумов и управляющими входами второго, третьего и четвертого реле переключения, а выход схемы связан управляющим входом генератора пилообразных колебаний, выход генератора соединен с информационными входами четвертого реле переключения, взаимно-инверсные выходы которого через повторители-усилители соединены соответственно с информационными входами третьего реле переключения, выходы которого связаны с вторым входом второго интегратора, первый вход которого соединен с линией задания периода автоколебаний, а выход интегратора подключен к информационным входом второго реле переключения, взаимно-инверсные выходы которого соединены соответственно с входом первого дросселя и вторым входом первого суммирующего усилителя, вторым дросселем и третьим входом первого суммирующего усилителя, первый вход которого соединен с выходом первого сумматора, а выход подключен к первому входу первого элемента сравнения, выход которого связан с управляющим входом пятого реле переключения, информационные входы которого через третий усилитель-повторитель соединены с выходом второго сумматора, а взаимно-инверсные выходы пятого реле связаны соответственно с входом третьего дросселя и вторым входом второго суммирующего усилителя, с входом четвертого дросселя и первым входом второго суммирующего усилителя, третий вход которого соединен с каналом сигнала смещения выходного сигнала, входы первого сумматора связаны соответственно с выходом задатчика и выходом второго интегратора, входы которого соединены соответственно с каналом задания амплитуды автоколебаний и выходом блока выделения модуля разности двух сигналов, входы которого подключены соответственно к каналу задания регулируемой переменной и выходу первого реле переключения, выходы первого, второго, третьего и четвертого дросселей соединены с атмосферой, а выход второго суммирующего усилителя соединен с линией выходного сигнала.
Это позволяет стабилизировать частоту и амплитуду автоколебаний в системе автоматического регулирования при отработке как задающих, так и возмущающих воздействий (сигнальных или параметрических).
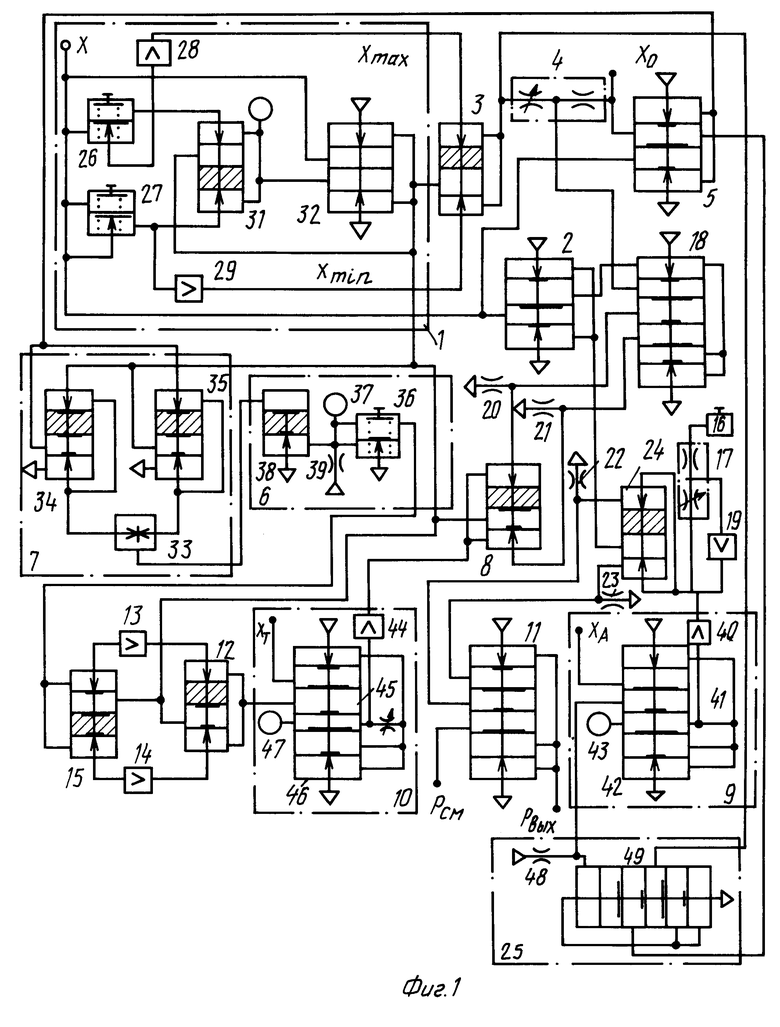
На фиг.1 приведена схема предлагаемого устройства; на фиг.2 и 3 процессы в устройстве и системе, его содержащей.
Устройство содержит индикатор 1 экстремумов, элемент 2 сравнения, первого реле 3 переключения, первый сумматор 4, второй элемент 5 сравнения, генератор 6 пилообразных колебаний, логическая схема НЕРАВНОЗНАЧНОСТЬ 7, второе реле 8 переключения, первый интегратор 9, второй интегратор 10, первый суммирующий усилитель 11, третье реле 12 переключения, первый и второй повторители-усилители 13 и 14, четвертое реле 15 переключения, задатчик 16, второй сумматор 17, второй суммирующий усилитель 18, третий повторитель-усилитель 19, первый, второй, третий и четвертый дроссели 20-23, пятое реле 24 переключения, блок 25 выделения модуля разности двух сигналов. Кроме того, указаны элементы, входящие в состав отдельных блоков элемент 26 запоминания максимума, элемент 27 запоминания минимума, повторители-усилители 28 и 29, пневмоемкость 30, реле 31 переключения, элемент 32 сравнения, элемент ИЛИ 33, реле 34 и 35 переключения повторитель 36 со сдвигом, пневмоемкость 37, клапан 38, дроссель 39, повторитель-усилитель 40, дроссель 41, усилитель 42, пневмоемкость 43, повторитель-усилитель 44, дроссель 45, усилитель 46, пневмоемкость 47, дроссель 48, усилитель 49.
Выходы индикатора 1 экстремумов соединены с входами первого реле 3 переключения, а его выход связан с вторым входом первого интегратора 9 и первым входом первого сумматора 4, вторые входы интегратора 9 и сумматора 4 соединены соответственно с каналами задания амплитуды автоколебаний ХА и регулируемой переменной Хо. Выход сумматора 4 соединен с первым входом суммирующего усилителя 18, второй и третий входы которого связаны соответственно с входом первого дросселя 20 и первым выходом второго реле 8 переключения, входом второго дросселя 21 и вторым выходом второго реле 3 переключения, а выход суммирующего усилителя 18 подключен к первому входу первого элемента 2 сравнения. Входы реле 8 переключения соединены с выходом второго интегратора 10, входы которого связаны с линией задания периода автоколебаний Хт и выходом третьего реле 12 переключения. Информационные входы третьего реле 12 соединены с выходами повторителей-усилителей 13 и 14 соответственно, входы которых связаны соответственно с взаимно-инверсными выходами четвертого реле 15 переключения. Информационные входы четвертого реле 15 подключены к выходу генератора 6 пилообразных колебаний, а управляющие входы второго 8, третьего 12 и четвертого 15 реле соединены с дискретным выходом индикатора 1 экстремумов (выход элемента 32 сравнения). Первый вход второго элемента 5 сравнения соединен с каналом задания регулируемой переменной Хо, его второй вход связан с каналом регулируемой переменной Х и вторым входом первого элемента 2 сравнения, а выход элемента 5 соединен с первым входом логической схемы НЕРАВНОЗНАЧНОСТЬ 7, второй вход которой связан с выходом индикатора 1 экстремумов (выход элемента 32), а выход схемы подключен к управляющему входу генератора 6 пилообразных колебаний. Пятое реле 24 переключения своими информационными входами соединено с выходом сумматора 17 через повторитель-усилитель 19. Входы сумматора 17 соединены с выходом задатчика 16 и выходом первого интегратора 9 соответственно. Управляющий вход реле 24 связан с выходом первого элемента 2 сравнения. Взаимно-инверсные выходы реле 24 соединены соответственно с входом третьего дросселя 22 и первым входом суммирующего усилителя 11, входом четвертого дросселя 23 и вторым входом суммирующего усилителя 11. Третий вход усилителя 11 соединен с каналом, в который подается сигнал смещения нулевого уровня Ром. Выход усилителя 11 соединен с выходным каналом устройства Рвых. Первый вход первого интегратора 9 соединен с выходом блока 25 выделения модуля разности двух сигналов, входы которого связаны с каналом задания регулируемой переменной Хо и выходом первого реле 3 переключения. Выходы дросселей 20-23 соединены с атмосферой.
Подобное соединение элементов позволяет реализовать в устройстве следующий закон управления:
Pвых Ром + B sign M, где M Xo+K1(Xэ-Xo)+K2 (Xт-T)dt;
(Xт-T)dt;
B Bo+K3 (XA-A)dt
(XA-A)dt
Хт заданное значение четверти периода автоколебаний;
Т текущее значение четверти периода автоколебаний;
Хэ экстремальные значения регулируемой переменной;
А амплитуда автоколебаний;
ХА заданное значение амплитуды автоколебаний;
Во заданный начальный уровень управляющего воздействия Ввых;
К1-К3 постоянные коэффициенты;
Хо и Х соответственно задание и текущее значение регулируемой переменной.
Рассмотрим работу отдельных элементов и всего устройства в целом. Индикатор 1 экстремумов формирует на своих выходах дискретный сигнал "0", "1", который управляет переключениями первого 3, второго 8, третьего 12 и четвертого 15 реле и является входным сигналом логической схемы НЕРАВНОЗНАЧНОСТЬ 7, а также обеспечивает запоминание и формирование на других двух своих выходах экстремальных значений регулируемой переменной Хмакс и Хмин.
Индикатор экстремумов на фиг.1 образуют элементы 28-32. Схема индикатора экстремумов работает следующим образом. При изменении сигнала Х, например в сторону возрастания в элементе 27 запоминается Хмин, элемент 32 срабатывает (на его выходе "1"). Выходной сигнал элемента 32 переключает реле 31 так, что на инвертирующий вход элемента 32 поступает выходной сигнал элемента 26, равный Х-с, где с минимальный сигнал смещения, настраиваемый в элементе 26. Сигнал Хмин коммутируется через повторитель-усилитель 29 и нижний контакт реле 3 на вход сумматора 4. При изменении знака производной входного сигнала Х происходит его запоминание в элементе 26. Элемент 32 возвращается в исходное состояние, что приводит к переключению реле 3 и коммутации на вход сумматора 4 сигнала Хмакс. Таким образом, индикатор экстремумов обеспечивает запоминание экстремальных значений регулируемой переменной Х и коммутацию этих значений в момент их появления на выход реле 3 переключения.
Сумматор 4 обеспечивает суммирование входных сигналов по формуле
Хо + К1(Хэ-Хо), где K1 ;
;
a и b проводимости дросселей сумматора 4. Аналогично работает и сумматор 17.
Логическая схема НЕРАВНОЗНАЧНОСТЬ, образованная элементами 33-35, формирует на своем выходе (элемент 33), сигнал В3 в соответствии с таблицей, где В1 и В2 входные сигналы:
В1 0 1 0 1
В2 0 0 1 1
В3 0 1 1 0
Генератор 6 пилообразных колебаний, образованный элементами 36-39, содержит повторитель 36 со сдвигом, охваченный положительной обратной связью через пневмоемкость 37. Клапан 38, управляемый выходным сигналом схемы 7, обеспечивает сброс выходного сигнала элемента 36, когда управляющий сигнал схемы 7 обращается в нуль.
Интегратор 9, содержащий элементы 40-43 обеспечивает интегрирование разности двух сигналов ХА-| Хо-Хэ| ХА-А, здесьХо-Хэ| модуль амплитуды автоколебаний, поступающий с блока 25 выделения модуля разности двух сигналов. Он образован усилителем 50 и дросселем 49.
Интегратор 10 подобен интегратору 9 и содержит элементы 44-47. Он осуществляет интегрирование разности двух сигналов Хт и сигнала, формируемого генератором 6, который коммутируется через реле 12 и 15 в отрицательную камеру усилителя 46.
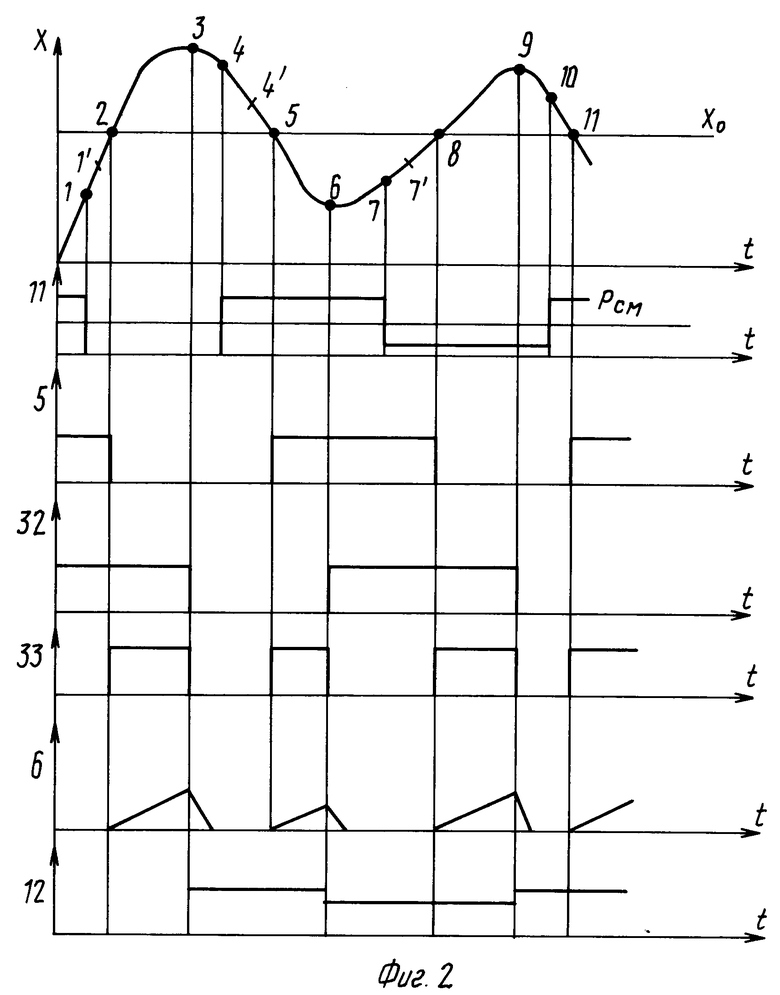
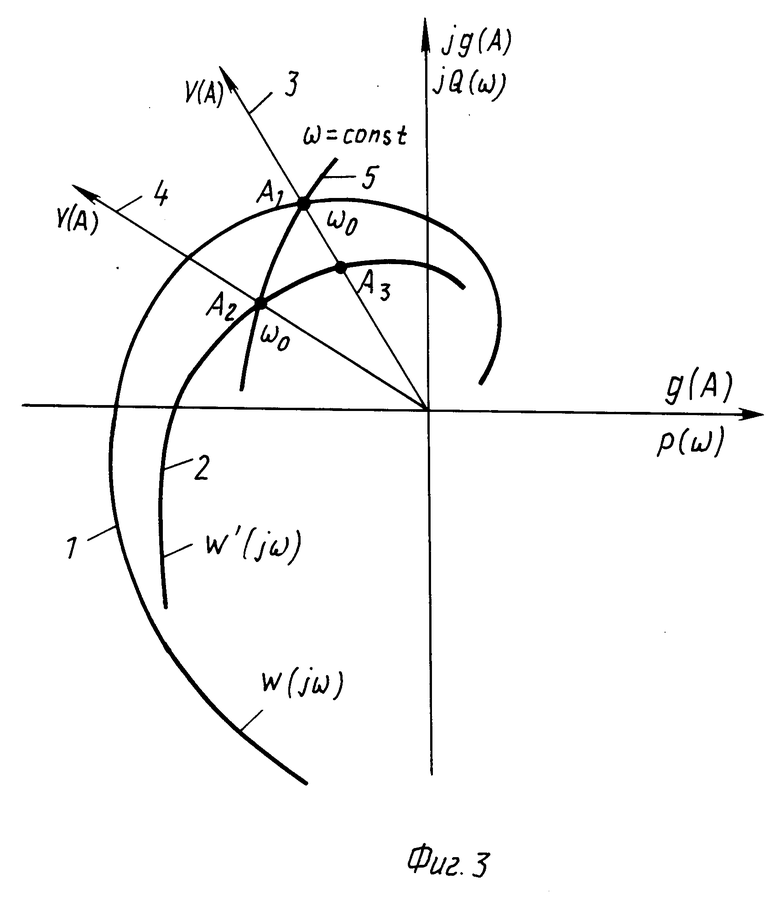
На фиг. 2 показана качественная картина изменения во времени входного сигнала Х и выходных сигналов отдельных блоков устройства, номера которых указаны у оси ординат. На фиг.3 интерпретируются процессы в системе с линейным объектом на комплексной плоскости, с помощью частотных амплитудно-фазовых характеристик объекта и инверсного комплексного гармонического коэффициента усиления со знаком минус предлагаемого устройства. Поскольку предлагаемое устройство есть ничто иное как релейный регулятор с отрицательным гистерезисом, параметры которого (величина управляющего воздействия и ширина зоны гистерезиса) изменяются в функции амплитуды и частоты автоколебаний, то в системе, содержащей данное устройство и линейный объект высокого порядка (n 2, где n порядок дифференциального уравнения, описывающего объект), всегда существуют устойчивые автоколебания, близкие к синусоидальным. Частота и амплитуда автоколебаний определяются как динамическими свойствами объекта, так и параметрами регулятора. При заданном объекте частота автоколебаний определяется положением точек переключения управляющего воздействия Рвых на кривой входного сигнала (точки 1, 4, 7, 10 см. фиг.2), а амплитуда автоколебаний зависит как от величины Рвых, так и от положения точек переключения. Если точка переключения смещается в сторону, противоположную Хо, то амплитуда автоколебаний уменьшается, а частота возрастает и наоборот. Для стабилизации амплитуды необходимо изменять величину управляющего воздействия ("полку" релейного управления), а для стабилизации частоты ширину зоны гистерезиса (положение точки переключения на кривой переходного процесса).
Если исследовать параметры автоколебаний методом гармонической линеаризации, то процессы в системе необходимо рассматривать на комплексной плоскости. Как известно, уравнение гармонического баланса имеет вид
W(j ω) -1/Wн(A) V(A). где W(j ω) частотная передаточная функция объекта;
V(A) инверсное значение комплексного гармонического коэффициента управляющего устройства со знаком минус.
Если изобразить эти характеристики на комплексной плоскости, то параметры автоколебаний определяются точкой их пересечения (см. фиг.3, кривые 1 и 3), причем частота автоколебаний определяется по W(j ω). Угол наклона V(A) к действительной оси определяется как ϕ= arcsin K1, где К1- коэффициент настройки сумматора 4. Если, например, параметры объекта изменятся, АФЧХ объекта становится W'(j ω) (кривая 2 на фиг.3), то параметры автоколебаний определяются точкой А3. Для того, чтобы восстановить частоту автоколебаний, годограф V(A) необходимо повернуть в положение 4 (кривая 5 здесь кривая равных частот). Это равносильно перемещению точки 1 переключения в положение 1' и т.д. остальных точек (см. фиг.2). Для восстановления амплитуды автоколебаний необходимо изменить величину управляющего воздействия. Именно эти операции и выполняет данное устройство.
Действительно, при изменении сигнала Х так, как показано на фиг.2, в индикаторе экстремумов запоминается Хмин 0. Этот сигнал через реле 3 коммутируется на вход сумматора 4, на выходе которого формируется сигнал (1-К1)Хо, поскольку Хэ 0. Этот сигнал повторяется в усилителе 18 и поступает в положительную камеру элемента 2 сравнения. В другую положительную камеру усилителя 18 подается сигнал с выхода реле 8 переключения, верхний контакт которого открыт единичным выходным сигналом элемента 32, а входом реле является выходной сигнал интегратора 10. Этот сигнал, таким образом, увеличивает или уменьшает значение сигнала в положительной камере элемента 2, изменяя положение точек переключения устройства. А пока что, в момент включения сигнал на выходе реле 8 близок к нулю. Единичный выходной сигнал элемента 2 переключает реле 24, открывая нижний его контакт, и в положительную камеру усилителя 11 поступает через повторитель-усилитель 19 сигнал с сумматора 17, равный
Во К4Р1, где K4 ,
,
a1, a2 проводимости дросселей сумматора 17.
Этот сигнал формируется задатчиком 16. На второй вход сумматора подается сигнал с выхода интегратора 9. Этот сигнал равен Р2 (1-К4)Р3, где Р3 К5 (ХА-А)dt. Сигнал А формируется блоком 25. Таким образом сигнал
(ХА-А)dt. Сигнал А формируется блоком 25. Таким образом сигнал
P2= K3 (XA-A)dt где К3 (1-К4)К5,
(XA-A)dt где К3 (1-К4)К5,
а Pвых= Pсм+(Bo+P2)
Выходной сигнал элемента 5 равен "1", поскольку Хо больше, чем входной сигнал Х, а выходной сигнал схемы 7 равен "0" (см. фиг.2), поскольку оба его входных сигнала равны "1". В результате на выходе генератора пилообразных колебаний "0", так как его выход через клапан 38 соединен с атмосферой.
В точке 1 (см. фиг.2 первый график) происходит переключение элемента 2, поскольку величина (1-К1)Хо-Х обращается в нуль. Это приводит к переключению реле 24, выходной сигнал которого теперь подается в отрицательную камеру суммирующего усилителя 11 и Рвых Рсм-(Во + Р2). Давление из положительной камеры этого элемента 11 сбрасывается через дроссель 23 в атмосферу.
В точке 2 (фиг. 2) срабатывает элемент 5. Это приводит к тому, что на выходе логической схемы 7 (элемент ИЛИ 33) появляется "1" (см. фиг.2), которая запускает генератор 6 (сопло клапана закрыто). Нарастание сигнала с элемента 36 продолжается четверть периода до момента появления Хмакс в точке 3 (см. фиг.2). В этой точке переключается элемент 32, в результате на выходе схемы 7 формируется "0", переключаются также реле 12 и 15, что приводит к запоминанию выходного сигнала генератора 6 в повторителе усилителе 31 и передаче этого сигнала через открытый верхний контакт реле 12 в отрицательную камеру интегратора 10. Этот сигнал сравнивается с заданием Хт и по результатам этого сравнения интегратор увеличивает или уменьшает свой выходной сигнал, который поступает теперь в отрицательную камеру суммирующего усилителя 18 через открытый верхний контакт реле 8. Давление из положительной камеры этого усилителя сбрасывается через дроссель 21 в атмосферу. Этими переключениями реле 8 обеспечивается смещение точек 1 и 4 в сторону Хо (см. фиг.2). Когда переменная Х достигает точки 4 или 4' вновь происходит срабатывание элемента 2. В этой точке сигнал (1-К1)Хо + К1Хмакс В4 равен Х, где Р4 выходной сигнал интегратора 10;
Р4 К (Хт-Т)dt;
(Хт-Т)dt;
К2 коэффициент настройки интегратора 10.
Это приводит к изменению знака управления, а величина управляющего воздействия равна
Pвых= Pсм+(Bo+P2), P2= K3 (XA-A)dt
(XA-A)dt
В точке 5 (см. фиг.2) вновь запускается генератор 6 пилообразных колебаний. Однако выход реле 12 остается неизменным, поскольку выходной сигнал элемента 32 не меняется. В точке 6 срабатывает элемент 32. В результате значение выходного сигнала генератора 6 запоминается в усилителе 14 и этот сигнал через открытый нижний контакт реле 12 подается в отрицательную камеру интегратора 10. Запомненный ранее в повторителе-усилителе 13 сигнал сбрасывается в атмосферу через открытые контакты реле 15 и клапана 38. Далее цикл повторяется.
Таким образом, в течение полупериода автоколебаний осуществляется измерение четверти периода колебаний и по результатам этого измерения формируется управляющее воздействие корректирующее частоту автоколебаний. Одновременно в течение периода автоколебаний дважды измеряется амплитуда автоколебаний. По результатам этих измерений корректируется величина выходного сигнала устройства.
Для настройки устройства необходимо хотя бы приблизительно знать динамические свойства объекта управления для того, чтобы определить диапазон, в котором можно осуществлять регулирование частоты автоколебаний. Затем необходимо настроить генератор пилообразных колебаний так, что время развертки перекрывало бы весь диапазон изменения четверти периода автоколебаний, а выходной сигнал генератора в этом диапазоне не превышает "1". Если динамические свойства объекта неизвестны, достаточно провести эксперимент. Включить устройство на входе объекта, установить коэффициент в сумматоре 4 К1 0 и включить систему, зафиксировать период установившихся автоколебаний, настроить генератор 6. Коэффициент К1 в сумматоре 4 устанавливается равным примерно 0,8-0,9 для того, чтобы обеспечить сначала минимальное значение амплитуды и периода автоколебаний. Величина управляющего воздействия, настраиваемая задатчиком 14, должна обеспечить начальное значение амплитуды автоколебаний, минимальное из диапазона регулирования с учетом настройки дроссельного сумматора 17, которая может быть произвольной. Интеграторы 9 и 10 настраиваются таким образом, чтобы обеспечить сходимость процессов самонастройки в системе по частоте и амплитуде.
Из описания работы устройства видно, что процесс адаптации его к изменяющимся свойствам объекта и среды осуществляется "пассивно", введением корректирующих сигналов, которые изменяют параметры автоколебаний. В данном устройстве отсутствует "активное" изменение настроек параметров устройства коэффициентов усиления, постоянных времени; здесь нет элементов с регулируемыми или активно изменяемыми параметрами, например, дросселей с регулируемой проводимостью, что существенно упрощает техническую реализацию, настройку и эксплуатацию устройства.
Работоспособность устройства проверена методом цифрового моделирования в системе с объектом третьего порядка.
| название | год | авторы | номер документа |
|---|---|---|---|
| АДАПТИВНЫЙ РЕЛЕЙНЫЙ РЕГУЛЯТОР | 2008 |
|
RU2369893C1 |
| АДАПТИВНЫЙ РЕЛЕЙНЫЙ РЕГУЛЯТОР | 2013 |
|
RU2531865C1 |
| АДАПТИВНЫЙ РЕЛЕЙНЫЙ РЕГУЛЯТОР | 2011 |
|
RU2462744C1 |
| АДАПТИВНЫЙ РЕЛЕЙНЫЙ РЕГУЛЯТОР | 2005 |
|
RU2284561C1 |
| ПНЕВМАТИЧЕСКИЙ РЕГУЛЯТОР | 1994 |
|
RU2113005C1 |
| АДАПТИВНЫЙ РЕЛЕЙНЫЙ РЕГУЛЯТОР | 2008 |
|
RU2391691C1 |
| Регулятор с релейной характеристикой | 1986 |
|
SU1432456A2 |
| РЕГУЛЯТОР С РЕЛЕЙНОЙ ХАРАКТЕРИСТИКОЙ | 2005 |
|
RU2302029C1 |
| Регулятор с релейной характеристикой | 1988 |
|
SU1585778A2 |
| Регулятор с релейной характеристикой | 1987 |
|
SU1418648A2 |
Изобретение относится к средствам автоматизации и предназначено для построения автоколебательных адаптивных самонастраивающихся систем автоматического управления со стабилизацией частоты и амплитуды автоколебаний. Устройство содержит индикатор экстремумов, элементы сравнения, интеграторы, реле переключения, суммирующие усилители, задатчик и дроссельные сумматоры. Процесс адаптации устройства к изменяющимся свойствам объекта и среды осуществляется путем введения корректирующих сигналов, изменяющих ширину зоны гистерезиса устройства и величину управляющего воздействия. Коррекция первого параметра обеспечивает стабилизацию частоты автоколебаний, коррекция второго стабилизирует амплитуду. 3 ил.
ПНЕВМАТИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ПОСТРОЕНИЯ АВТОКОЛЕБАТЕЛЬНЫХ САМОНАСТРАИВАЮЩИХСЯ СИСТЕМ, содержащее индикатор экстремумов, вход которого соединен с каналом регулируемой переменной, пять реле переключения, информационный и управляющий входы первого из которых связаны с выходами индикатора экстремумов, два сумматора, первый из которых входами подключен к выходу первого реле переключения и каналу задания регулируемой переменной, два элемента сравнения, одни входы которых связаны с каналом регулируемой переменной, два интегратора разности двух сигналов, генератор пилообразных колебаний, три повторителя-усилителя, логическую схему, два суммирующих усилителя, задатчик, блок выделения модуля разности двух сигналов и четыре дросселя, отличающееся тем, что в нем другой вход второго элемента сравнения соединен с каналом задания регулируемой переменной, выход подключен к первому входу логической схемы НЕРАВНОЗНАЧНОСТЬ, второй вход которой соединен с дискретным выходом индикатора экстремумов и управляющими входами второго, третьего и четвертого реле переключения, а выход логической схемы НЕРАВНОЗНАЧНОСТЬ связан с управляющим входом генератора пилообразных колебаний, выход которого соединен с информационными входами четвертого реле переключения, взаимно инверсные выходы которого через повторители-усилители соединены соответственно с информационными входами третьего реле переключения, выход которого связан с вторым входом второго интегратора разности двух сигналов, первый вход которого соединен с каналом задания периода автоколебаний, а выход подключен к информационным входам второго реле переключения, взаимно инверсные выходы которого соединены соответственно с входом первого дросселя и вторым входом первого суммирующего усилителя, первый вход которого соединен с выходом первого сумматора, а выход подключен к другому входу первого элемента сравнения, выход которого связан с управляющим входом пятого реле переключения, информационные входы которого через третий усилитель-повторитель соединены с выходом второго сумматора, а взаимно инверсные выходы пятого реле связаны соответственно с входом третьего дросселя и вторым входом второго суммирующего усилителя, с входом четвертого дросселя и первым входом второго суммирующего усилителя, третий вход которого соединен с каналом смещения выходного сигнала, входы второго сумматора связаны соответственно с выходами задатчика и первого интегратора разности двух сигналов, входы которого соединены соответственно с каналом задания амплитуды автоколебаний и выходом блока выделения модуля разности двух сигналов, входы которого подключены соответственно к каналу задания регулируемой переменной и выходу первого реле переключения, выходы первого четвертого дросселей связаны с атмосферой, а выход второго суммирующего усилителя с каналом выходного сигнала.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Шуш Р | |||
| Релейные адаптивные системы | |||
| Ж | |||
| "Автоматика и телемеханика", 1973, N 9, с.186-189. | |||
