.ifcwa
НОвНА
П гсйн
i
(Л
С
10
Изобретение относится к электротехнике и может быть использовано в электроприводах постоянного тока.
Целью изобретения является снижение пульсаций тока якоря, повьппение производительности и экономичности.
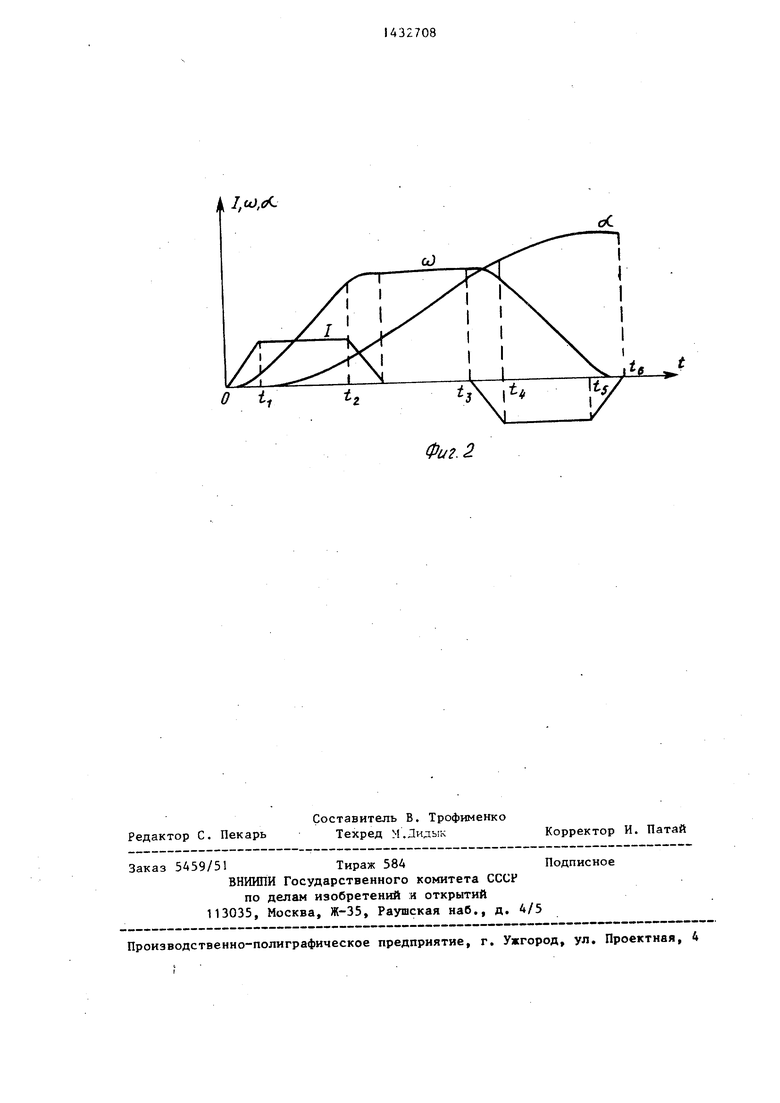
На фиг. I приведена схема электропривода i на фиг. 2 - диаграммы работы элек троп pifB ода .
Многопозиционный электропривод постоянного тока содержит электродвигатель I, снабженный датчиком 2 ЭДС и сельсин-датчиком 3 положения и подключенный через датчик 4 тока к тири- tS сторному преобразователю 5, суммирующие усилители 6, выходы которых сое- цинены с входами тиристорного преобразователя 5, первый компаратор 7, первый вход которого соединен с вы- 20 ходом датчика 2 ЭДС, регулятор 8 тока, второй компаратор 9, пре образо- ватель 10 ЭДС, включенный между входом датчика 2 ЭДС и первым входом второго компаратора 9, фазочувствитель- 25 ный выпрямитель 11, включенный меж- цу выходом сельсии-датчика 3 поло- кения и вторым входом первого компаратора .
Электропривод также содержит D- риггер 12, преобразователь 13 уровня, пороговый ключ 14, преобразователь .15 тока и третий компара- гор 16, первый и второй входы которого соединены соответственно с выходами датчика 2 ЭДС и фазочувстви- тельного вьшрямителя 11, а выход - о счетным входом D-триггера 12, |вход установки которого соединен Ь внешним пусковым блоком, а выход через преобразователь 13 уровня соединен с третьим входом первого компаратора 7, выход которого подключен к второму входу второго компаратора 9, третий вход которого соединен с выходом датчика 2 ЭДС, а выход подключен к первому входу регулятора 8 тока, выход датчика 4 тока через пороговый ключ I4 и преобразователь 15 тока соединен соответственно с вторым и третьим входами регулятора 8 тока, выход которого подключен к первым входам суммирующих усилителей 6, вторые входы котоk
30
35
40
45
50
нуля, который преобразуется в напряжение нулевого уровня преобраз вателем 13 уровня. Выходное напря ние преобразователя 13 уровня под ется на третий вход первого комп тора 7, на второй вход которого п дается напряжение с выхода фазочу вительного выпрямителя I1, пропор нальное выходному напряжению сель датчика 3 положения механизма. Чт бы исключить перерегулирование по ложению производственного механиз на первый вход первого компаратор подается корректирующий сигнал с хода датчика 2 ЭДС, пропорциональ ный ЭДС двигателя, обеспечивающий формирование команды на останов д гателя не в момент достижения зад ного положения, а с некоторым опе жением, тзк что к моменту останов двигателя механизм точно выходит заданное положение.
В исходном положении двигатель находится в состоянии покоя., выхо ные напряжения датчиков 4 тока и ЭДС двигателя 1 равны нулю. Равны нулю выходные напряжения фазочувс вительного выпрямителя 11, преобр зователя 10 ЭДС, преобразователя тока и порогового ключа 14. Алгеб ическая сумма сигналов на входах первого компаратора 7 также равна нулю;
и
пч
- ( + и,,) 0. (I)
дается гера 12.
Сигнал команды на перемещение механизма в очередное положение п на вход Установка D-три D-триггера 12 переводит в состояние Логическая единица, которое преобразователем 13 уровн преобразуется в стабильное по уро ню напряжение U,, и подается на третий вход первого компаратора Поскольку напряжение f,. а выхо фазочувствительного вьтрямителя 1 напряжение U,. на выходе датчика
АСf .
ЭДС равны нулю, равенство (1) нар шается и принимает вид:
(2)
и
пу
-(.64иэдс)
О
На выходе первого компаратора
рых соединены с выходом датчика 2ЭДС,55 формируется стабильное по уровню
Многопозиционный электропривод работает следующим образом.
В исходном положении В- триггер 12 находится в состоянии логического
напряжение U О, знак которого ределяется из соотношения:
UK, I ч sign
Un4-(U
РвЧ
-t-U
Uc
0
S 0 5
0
нуля, который преобразуется в напряжение нулевого уровня преобразователем 13 уровня. Выходное напряжение преобразователя 13 уровня подается на третий вход первого компаратора 7, на второй вход которого подается напряжение с выхода фазочувст- вительного выпрямителя I1, пропорциональное выходному напряжению сельсин- датчика 3 положения механизма. Чтобы исключить перерегулирование по положению производственного механизма на первый вход первого компаратора 7 подается корректирующий сигнал с выхода датчика 2 ЭДС, пропорциональный ЭДС двигателя, обеспечивающий формирование команды на останов двигателя не в момент достижения заданного положения, а с некоторым опережением, тзк что к моменту останова двигателя механизм точно выходит в заданное положение.
В исходном положении двигатель 1 находится в состоянии покоя., выходные напряжения датчиков 4 тока и 2 ЭДС двигателя 1 равны нулю. Равны нулю выходные напряжения фазочувст- вительного выпрямителя 11, преобразователя 10 ЭДС, преобразователя 15 тока и порогового ключа 14. Алгебраическая сумма сигналов на входах первого компаратора 7 также равна нулю;
и
пч
- ( + и,,) 0. (I)
0
5
0
дается гера 12.
Сигнал команды на перемещение механизма в очередное положение по- на вход Установка D-триг- D-триггера 12 переводится в состояние Логическая единица, которое преобразователем 13 уровня преобразуется в стабильное по уровню напряжение U,, и подается на третий вход первого компаратора 7. Поскольку напряжение f,. а выходе фазочувствительного вьтрямителя 1I напряжение U,. на выходе датчика 2
АСf .
ЭДС равны нулю, равенство (1) нарушается и принимает вид:
(2)
7
и
и
пу
-(.64иэдс)
О
На выходе первого компаратора
напряжение U О, знак которого определяется из соотношения:
I ч sign
Un4-(U
РвЧ
-t-U
Uc
).(3)
Напряжение U, подается на второй вход второго компаратора 9, которое сравнивается с суммой сигналов датчика 2 ЭДС и преобразователя 10 ЭДС, причем имеет место соотношение:
UK. -(и
,)0,
поскольку в исходном состоянии сумма сигналов в скобках равна нулю. На выходе второго компаратора 9 также формируется стабильное напряжение и, , знак которого определяется из соотношения:
и
Стабилизация тока якоря на уровне Iдоп продолжается до тех пор, пока сумма сигналов на входе второго компаратора 9 не изменит свой знак. В соответствие с соотношением (5)
15
2 I Kjl sign| К| э. / изменит свой знак выходное напряжение Напряжение UK О подается на пер- . вто-рого компаратора 9. Контур регули- вый вход регулятора 8 тока, где сравнивается с алгебраической суммой сигров ания производной тока обеспечивает линейный закон (фиг. 2, интервал
налов и, о преобразователя 15 тока и 20 времени t...tj) спадания тока. КорU: порогового ключа 14:
ректирующий сигнал U, выбирается таким, чтобы в момент времени t t скорость двигателя достигла уровня ограничения, а ток уменьшился до тока
Ui
KI Пока ток I/
- ( + и ) 0.
9
LJ, якоря двигателя 1 меньше уровня ограничения I пороговый ключ 14 закрыт и на его выходе поддерживается нулевое напряжение Uj 0. Поэтому с напряжением UK, второго компаратора 9 сравнивается только выходное напряжение U,-- преобразователя 15 тока. °
Преобразователь 15 тока представляет собой дифференцирующий фильтр, формирующий проводную от средней составляющей тока якоря и эффективн подавляющий импульсные помехи и действие пульсирующей составляющей TOKk якоря. Этим требованиям хорошо удовлетворяют активные фильтры Бот- терворта на операционных усилителях
Линейная часть электропривода представляет собой контур регулирования производной тока якоря, величина которой определяется уровнем U) выходного напряжения второго компаратора 9 и коэффициентом преобразования преобразователя 15 тока. Регулятор 8 тока и обратная связь по ЭДС, формируемая датчиком 2 ЭДС, обеспечивают практически линейный закон нарастания тока якоря двигателя.
Процесс линейного нарастания тр- ка якоря закончится в момент времен t t, (фиг. 2). Когда ток достигнет уровня ограничения 1доп. °т- кроется пороговый ключ 14 (фиг. 1) и в действие вступит обратная связь по току двигателя 1. Совместное дей
ствйе обратной связи по току двигателя через датчик 4 тока и корректирующего сигнала преобразователя 15 тока обеспечивает высокую стабиль- ность поддержания тока якоря на неизменном 1др„ уровне (фиг. 2, интервал времени t,.... tj), скорость двигателя нарастает по линейному 10 закону.
Стабилизация тока якоря на уровне Iдоп продолжается до тех пор, пока сумма сигналов на входе второго компаратора 9 не изменит свой знак. В соответствие с соотношением (5)
15
изменит свой знак выходное напряжение - . вто-рого компаратора 9. Контур регули- изменит свой знак выходное напряжение вто-рого компаратора 9. Контур регули-
ров ания производной тока обеспечивает линейный закон (фиг. 2, интервал
ректирующий сигнал U, выбирается таким, чтобы в момент времени t t скорость двигателя достигла уровня ограничения, а ток уменьшился до тока
5 холостого хода.
Режим стабилизации скорости двигателя на уровне ограничения будет протекать до тех пор, пока не сменит знак соотношение (2) сигналов на входе
0 первого компаратора (t t). Выходные напряжения первого 7 и второго 9 компараторов сменят свои знаки. Контур тока начнет формировать тормозной ток (t.... tj.)полярность которого протиg воположна полярности тока при разгоне ,
привода на интервале времени t
50
Корректирующий сигнал, поступающий на первый вход первого компаратора 7 с выхода преобразователя 10 ЭДС, выбирается таким, чтобы при выходе механизма в заданное положение, скорость двигателя приняла нулевое значение.
Это исключает перерегулирование по положению. Преобразователь 10 ЭДС вы- 5 деляет сигнал, пропорциональный производной от ЭДС двигателя с подавлением импульсных помех. Его функции аналогичны функциям преобразователя 15 тока.
0
Дпя перевода многопозиционного
электропривода производственного механизма 6 исходное состояние необходимо D-триггер 12 перевести в 5 состояние логического нуля. Это осуществляется по положительному перепаду выходного напряжения третьего компаратора 16. Тогда новому положению механизма будет соответствовать нулевое выходное напряжение фа- зочувствительного вьтрямителя 11. Для перевода механизма в новое поло- ж|ение необходимо вновь подать управляющий импульс на вход установки D-триггера 12. Поскольку сигнал не- о|бходимой полярности с выхода сельсин-датчика 3 и фазочувствительного выпрямителя 1I появится только после е|го поворота на 180, срабатьшание т втьего компаратора должно происходить после поворота сельсин-датчика 13 на угол, несколько превьшающий 80 . Это достигается соответствующей установкой уровня сигналов с датчика 2 ЭДС и фазочувствительного выпрямителя 11 суммирующими резисторам третьего компаратора 16.
Многопозиционный электропривод про изводствениого механизма обеспечи- врет практически линейный закон изменения тока якоря и стабилизацию его постоянном уровне.
I Снижается энергопотребление из-за у|4еньшения пульсации тока и вызьшае- м|зго ими тормозного момент.а. В конечном счете повьшается производительность позиционирующего механизма пу- тгм сокращения времени переходных п; оцессов при уменьшении пульсаций до допустимого уровня и уменьшении машинного времени в рабочем цикле.
ф|Ормула изобретения
; Многолозиционный электропривод п эстоянного тока, содержащий электро- д игатель, снабженный датчиком ЭДС и Сельсин-датчиком положения и соединённый через датчик тока с тиристор0
5
ным преобразователем, суммирующие усилители, вьпсоды которых соединены с входами тиристорного преобразовав
теля, первый компаратор, первый вход которого соединен с выходом датчика ЭДС, регулятор тока, второй компаратор, преобразователь ЭДС, включенный между выходом датчика ЭДС и пер0 вым входом второго компаратора, фазо- чувствительный выпрямитель, включенный между выходом сельсин-датчика положения и вторым входом первого компаратора, отличающийся тем, что, с целью снижения пульсаций тока якоря, повышения производительности и экономичности, в него введены пусковой блок,D-триггер,преобразователь уровня, пороговый ключ, преобразователь тока и третий компаратор, первый и второй входы которого соединены соответственно с выходами датчика ЭДС и фазочувствительного вьтрямителя, а вьгход- со счетным входом D-триггера, вход установки которого связан с пусковым блоком, а выход через преобразователь уровня соединен с третьим входом первого компаратора, выход которого подклю0 чен к второму входу второго компаратора, третий вход которого соединен с выходом датчика ЭДС,а выход подключен к первому входу регулятора тока, выход датчика тока через пороговый
5 ключ и преобразователь тока соединен соответственно с вторым и третьим входами регулятора тока, выход которого подключен к первым входам суммирующих усилителей, вторые входы
0 которых соединены с выходом датчика ЭДС. .
5
I,U},(
о ii
| название | год | авторы | номер документа |
|---|---|---|---|
| Многопозиционный электропривод постоянного тока | 1988 |
|
SU1704259A2 |
| Устройство для разделения режимов управления электродвигателем постоянного тока | 1982 |
|
SU1032578A1 |
| Способ управления тиристорным электроприводом | 1982 |
|
SU1078565A2 |
| Способ управления тиристорным электроприводом и устройство для его осуществления | 1980 |
|
SU879723A1 |
| ВЕНТИЛЬНЫЙ ЭЛЕКТРОПРИВОД | 1990 |
|
RU2012991C1 |
| Вентильный электродвигатель | 1989 |
|
SU1670753A2 |
| Электропривод постоянного тока | 1986 |
|
SU1317626A1 |
| Электропривод постоянного тока | 1978 |
|
SU744883A1 |
| Реверсивный электропривод | 1988 |
|
SU1667213A1 |
| Устройство для разделения режимов управления электродвигателем постоянного тока | 1987 |
|
SU1578797A1 |
Изобретение относится к электротехнике и может быть использовано для управления электродвигателями постоянного тока. Целью изобретения является снижение пульсаций тока якоря, повышение производительности и экономичности. Устройство содержит последовательно соединенные первый 7 и второй 9 компараторы, регулятор тока 8, выход которого подключен к входу тиристорного преобразователя 5. Выход датчика 2 ЭДС соединен с входами суммирующих усилителей 6, преобразователя 10 ЭДС и первого и второго компараторов 7 и 9. В данном электроприводе обеспечивается практически линейный закон изменения тока якоря и стабилизация его на постоян- х ном уровне. 2 ил.S
Фи2.2
| Позиционный электропривод производственного механизма | 1983 |
|
SU1145440A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Авторское свидетельство СССР 1163452, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
