Датчик 2 ЭДС, датчик 4 тока, суммирующие усилители 6, регулятор 7 тока, преобразователь 8 ЭДС, фазочувствительный выпрямитель 9. преобразователь 18 тока, компараторы 12, 13 и 14, фильтры 15 и 16, могут быть вылапнены нз элементах унифицированной блочной системы регулирования аналогового типа, например УБСР-АИ. или интегральных микросхемах, например К140УДС.- .
О-триггер 11. преобразователь 10 уровня и пороговым ключ 17 могут быть выполнены из логических элементах, например серии К155 или К555.
В качестве сельсин-датчика положения мохсет быть использован любой сельсин- дэтчик, выпускаемый промышленностью, например типа ДБ-4С4А, а тиристорный преобразователь - типа ТПЕ.
Многопозиционный электропривод постоянного тока работает следующим образом.
В исходном положении D-тригтер 11 находится в состоянии логического куля, кото- рое преобразуется в напряжение нулевого уровня преобразователем 10 уровня, и мно- гопозмционньт электропривод находится в состоянии покоя. Сигнал команды нз перемещение механизма в очередное подоже- нме подается на вход Устзвкз D-триггерэ 11 в виде короткого и-мпульса. D-триггер переводится в СОСТОР.КИЗ 1, которое преобразователем 10 уроьня преобразуется в стабильное напряжение Uny и подается nai суммирующий вход первого .компаратора 12. В состоянии покоя привода напряжение ифпу на выходефззочувствптельнсго выпрямителя 9 и напряжение иэдс на ывходе датчика 2 ЭДС равны нулю, поэтому
Uny - (ифоу + 1Ьдг) О
и на выходе первого компаратора 12 формируется стабильное по уровню напряжение I Uxi I О, знак которого определяется из соотношения
UKi -1 UKit sfgn Uny - (ифву + иэдс) (2)
Напряжение U«i подается на суммирующий вход второго компаратора 13, где сравнивается с суммой сигналов датчика 2 ЭДС и преобразователем 8 ЭДС. Имеет место соотношение
Uet-{lW + Un,) 0 ;
поскольку сумма сигналов в скобках в исходном состоянии равка нулю.
5 10
15
20
253035 40
45
50
На выходе второго компаратора 13 также формируется стабильное напряжение UK2, знак которого определяется из соотношения
I Ок2 I Sign UK1 - (иэдс + Una) . (4)
Напряжение I UK2 I 0 подается на суммирующий вход регулятора 7 тока, где сравнивается с алгебраической суммой сигналов Uig преобразователя 18 тока и Ui иорогоного ключа 17
UK2 - (Uig + Ui) - 0.
Пока ток я якоря двигателя 1 меньше урс-аня ограничения Удои, пороговый ключ 17 закрыт и на его выходе поддерживается нулевое напряжение Ui - 0. Поэтому с напряжением второго компаратора 13 сравнивается только выходное напряжение- Uj8 преобразователя 18 тока, формирующо- го сигнал, пропорциональный произзодноП от среднего значения ч ока. Подавленна пульсирующей составляющей тока осуществляется с помощью второго фильтра 16 первого порядка.
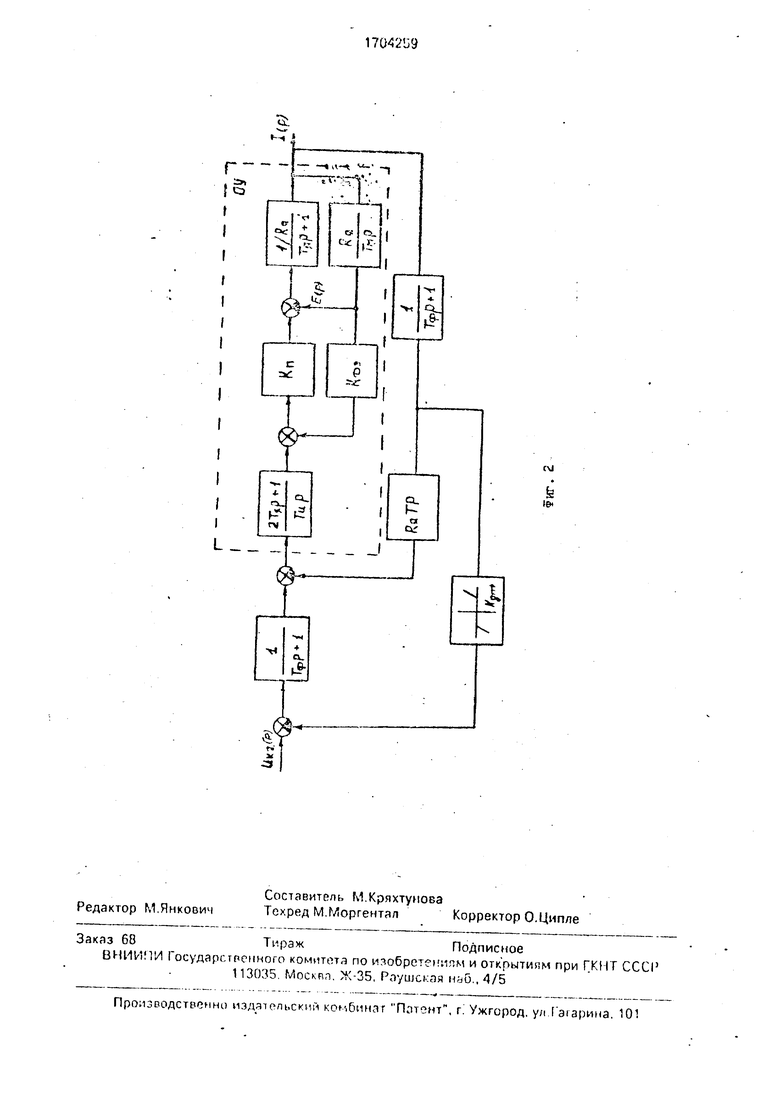
Электрический двигатель 1, тирмстор- ный преобразователь 5 с суммирующим. усилителями 6 с коэффициентом усиления Кп, датчик 4 тока, второй филыр 15 перло;о порядка, преобразователь 18 тока с коэффициентом преобразования R«T по средне составляющей тока якоря, датчик 2 ЗДС с коэффициентом усиления Кдэ. регулятор тока 7 и первый фильтр 15 первого порядка образуют линейную часть многопозиционного электроприЕюдя (фчг. 2), осуществляющую регулирование nf-оизьодной тока якоря, величина которой определяется выходным напряжением второго компаратора 13 и черэз первый фильтр 15 первого- порядка подается на суммирующий вход регулятора 7 токз.
Первый и второй фильтры первого порядка имеют одинаковую передаточную функцию
Ј
Wф(P)
ТФР -f 1
55
и совместно с регулятором 7 тока и обратной связью по ЭДС доигзтеля. формируемой датчиком 2 ЭДС с коэффициентом передачи Кдэ, обеспечивают практически линейный закон нарастания тока лкоря двигателя.
Процесс линейного нарасыния юка якоря заканчивается в момент достижения уровнем токэ ограничения 1ДОл. поскольку в
:r.oi момонт открываемся пороговый ключ 7 (vnr. 1 и 2)и п действе вступает обратная и ..язь по току диктате/:; через да ччк 4 тока,
тором Фильтр 16. Совместное де /г.тоие обратной связи по току дьигагеля п коррекги- пующого сигнала преоСразОо-леля 18 тока обеспечивают иысимую стабильность под- дер.тания тока якоря на неизменном 1доп уровне. Пг;и этом скорость двигателя нара- гтаеч по линейному закону.
Стабилизация тока якоря i-ra уропнс 1доп .род - л. до тех пор, пока сумма сигна- юв (3) HS i; и ход с второго компаратора 13 не
.-«монпт с:;ой знак. В соотвя rcTir/ii i с соотношением () изменяет свой знак выходное напрмжониз второго компаратора 13, Контур регулирования производной точа (фиг. 2) обеспечир,гн;т /г неинь и закон сплдания тока. Корректирующий сигнал ипз выбирается таким, чтобы в момент достижения скорости уроппя ограничения ток якоря уменьшился ло тикз холостого хода.
Режим стаби/и-;за 1.ии скорости дои rate- in на уровне ограничения будет протекать ;о тех пор, пока не сменит загон соогиоше ио (1). Выходные напряжении первого 12 и
ioonro 13 компараторов сменят спои зна .и. Контуо начнет формировать тормозной
;ок, полярность которого противоположна
полярности тока при разгоне привода. Корректируюш.ий сигнал, поступающий на сумt-vipyiciJi Hi иход первого 12 компаратора с
гыхода пресбрэзооатолп 8 ЭДС. ьыОнрзстся таким, чтобы при выходе механизма в
идгнпое положение скорость двигателя и
/к приняли нулевое значение. Это исклю, г перерегулирооа ;ие по положению.
.. Сч/Оразователь О ЭДС выделяв) сигнал,
; о:юрцисна/ ьиый производной ЭДС дви глеля с подавлением импульсных помех.
Каждому новому положению многопо- зшм онпого электропривода должен соот- ьсгслвопать О D триггера 11. После поворота сельсин-датчика 3 положения на 180° выходное напряжение фазочувсгви- тельного с.ыпрямитоля 9 изменяет свою полярность, в результате изменяет полярность выходное напряжение третьего компаратора 14. Положительный перепад напряжения третьего компаратора 14 по счетному входу D-тригггра переводит его в состсчние О. /Для перевода производственного механизма в ноное положение не... однму D-триггер 11 перевести в
. остоянис Г KpaTKOFipc-f-fiHHWM импульсом ю входу Установка.
Покажем, чтомпогопоэинионный элскт- ропр ц;од оОоспсмимаот практически ЛИПРЙ- закон изменен: тока якоря и ого
. Лбп. ТИЗЛЦПЮ Н,1 ГГОСК ННОМ VpOllllf-.
Для объекта управления ОУ (фиг, 2) имеем
-1СР) иу(р)
5 .Р
RP (Тя Тм Р2 + Т„ Р -М - Кп К/1Э )
(5)
Коэффициент передачи Кэдс датчика 2 ЭДС выберем таким, чтобы корни
+
(б)
+ Т31Н13 /1ГГ .
1м
были .вещественными. Это имеет место, если
20
О 1 - Кп Клэ
4ТЯ
(7)
1
Но при 1 - КпКд- - 0 Pi 0; Р2 - - - - обьект
I я
управления нейтральный, запас устойчиво- сти полностью отсутствует. Максимальный запас устойчивости достигается если
1 КцКдз Тм4ТЯ
(8)
тогда PI г
1
2ТЯ
(9)
и передаточная функция объекта упрзале- 35 ния принимает пид
1LLL.
4КПТЯР
(10)
Uy(P) Кя(2Т«Р+1)2
С учетом (10) структурной схеме линейной масти многопозиционного электропривода (фиг. 2) соответствует передаточная Функция
45
I(P) 4КГ,Т„
U,2 ( Р )TMRB 1
2ТяТфР2 + (2ТЙ + Тф ) Р + 1
И
(11)
4КпТяТ
Но
Ти
2Тя + Тф 2ТяТф.
тогда
(Р) 4K,LT«
Мк2(Р)tv,Rp
х(ТГр1 - ТУ( где Ti Тз.
Решение (12) при Un2, изменяющемся скачком, состоит из суммы двух экспонент, причем одна из них, определяемая Т2, быс- тразатухэющэя, что обеспечивает плавное нарастание темпа изменения тока от нуля до максимального значения, определяемого постоянной времени TL Плавное нарастание юк г на начального участке обеспечивает эффективное подавление импульсных помех и синзеннык с ними колебаний тока. После эзгухзния экспоненты с постоянной времени Т2 ток нарастает по экспоненте
,,., 4KnTBUr.2 x |(t)--„ х
,,
(13)
RKUокает из (12), если принять 2 - 0. Из (13) следует
| т- - .-- х
1 (l ) 01/ Л
1№(1 + )
„т /. . 2КПТ ч Т„(1 T--j:--)
Ти
(14)
. 2Kr,U,2 откуда 1,:-: ---------- РЯТИ ( 1
, 2КПТ N
Ти
я с. ыл;,-т позксг.оненте с постоянной
времени
2КПТ
(1 + ). I и
4КпТ„и.с2 V,т
Поскольку и Гд }.;охис Hr.Tv,
вы&рэть Л;ОЁОЙ, дсстэточно большой вели- чини, то Mil (13) следует, что ток до 1 1доп будет itipacToTb помячальному практически Л1и;еиному участку с небольшим запэздыза- нг.ем в начал, в Г-иряемым из условия эф- фектианого подзипочмя помех.
Параметр Т.. и Т (фи{. 2) следует выбирать из необходимой относительной точности
/ t
Im - I мин
А п О -
ш
поддержания производной тока якоря в момент достижения предельного значения
1доп.
При достижении предельного ДОп тока открывается пороговый ключ 17 и замыкается обратная связь по току с коэффициентом передачи Kgm (фиг, 2), Если принять
Кдг
Ук2
доп
м«.
4К„ТЯ
то.для замкнутой по току линейной системы при начальных условиях i(0) - доп имеем
15
,(p).
откуда l(t) ---- 1Яоп.
т.о. условие поддержания тока якоря на неизменном предельном уровне выполняется.
В предлагаемом многопозииионпом электроприводе а срланенки с проготиппм
обеспечивается снижение йпп/нг,уды колебаний тока з 1,5-2,0 раза. Снижен;-.; уроинг. колебаний умэны оет переменную ляющую тока якоря /..имгато.тл, vЛучик чл комму,ац-.чю и Ci-ii/i-cVH дрнгйтеля.
Это дзет возможность у.- атгчить н-; i т/тчи ну амплитуды колс-б-эп -й ток и
ПОВЫСИТЬ ПГСИЗ ВСДИТе Л i-.HO ,-Tb MPvy} iV- .3
за счгч сокращения времени п;;нсхо; нь:х
ПРОЦГ ССБ V, бОЛОС: СОЛг-ЮГО ИСПОЛ .ГОБа ь..Ч ДВИГ, (51Я Г.ОТОКу. В р.., ЛЬТПТ.-, ДОСТ-/,ГЗОТС
сокращение машинного ::po;-:-c :i п цикле нз 1,5 с.
Формула изобретен и я
МнОГОПОЗ .Ц И Н1-: г1Й ЛСКТрОПрИ -.ОД ПОстоянного тока по опт. ее. No 14327иЗ, о т - л и ч з ю щ и и с я тем, что, с целью снижения амплитуды колебании тока якоря дангатемя и улучшения использования элоктроприс-о- да потоку, в него введены перный и мерой
фильтры первого . причем г;ход первого фильтра соединен с выходе, гтсрого компаратора, а выход-с суммирующим входом регулятора тока, и ход второго фильтра соединен с выходом датчика токз, а пыход с входом порогового ключа и преобразователя тока.
см
fe
te«


| название | год | авторы | номер документа |
|---|---|---|---|
| Многопозиционный электропривод постоянного тока | 1987 |
|
SU1432708A1 |
| Дискретно-цифровой электропривод | 1985 |
|
SU1350800A1 |
| Двухпозиционный электропривод кантователя блюминга | 1983 |
|
SU1088831A1 |
| Датчик ЭДС двигателя постоянного тока | 1988 |
|
SU1534712A1 |
| Электропривод постоянного тока | 1981 |
|
SU1005256A1 |
| Датчик ЭДС электродвигателя постоянного тока | 1986 |
|
SU1361695A1 |
| Электропривод клети прокатного стана | 1981 |
|
SU970615A1 |
| Устройство для разделения режимов управления электродвигателем постоянного тока | 1982 |
|
SU1032578A1 |
| Электропривод постоянного тока шахтной подъемной установки | 1988 |
|
SU1654208A1 |
| Электропривод постоянного тока с двухзонным регулированием скорости валков клети прокатного стана | 1986 |
|
SU1411911A1 |