00 ел 05 СЛ
Изобретение относится к электротехнике, а именно к управлению автоматизированными электроприводами постоянного тока, и предназначено для управления быстродействующими широкорегулируемыми электроприводами механизмов подач металлорежущих станков.
По основному авт. св. № 879723 известен способ управления тиристорным электроприводом, при котором сравнивают величины сигналов, пропорциональных модулю напряжения на входе системы импульснофазового управления тиристорным преобразователем и модулю напряжения обратной связи по скорости вращения электродвигателя, и изменяют в зависимости от разности указанных сигналов угол управления тиристорным преобразователем, а также измеряют ток электродвигателя и при отрицательной разности указанных сигналов и токах в силовой цепи тиристорного преобразователя, равных нулю, к электродвигателю подключают дополнительный неуправляемый источник питания, а при превышении током электродвигателя заданного значения дополнительный источник питания отключают, замыкая при токах в силовой цепи тиристорного преобразователя, равных нулю, цепь его нагрузки 1.
В электроприводе по указанному способу управления устраняется режим прерывистого тока, но в реверсивном электроприводе в режиме прерывистого тока от напряжения тиристорного преобразователя возникает несоответствие между величиной, а иногда и знаком входного напряжения системы управления тиристорным преобразователем и дейсфвительным значением тока якоря электродвигателя в связи с тем, что осуществляемая импульсная стабилизация тока якоря электродвигателя от напряжения дополнительного неуправляемого источника питания является однополярной и не изме; няется в зависимости от входного напряжения системы управления тиристорным преобразователем. И в замкнутой системе электропривода для уравновешивания несоответствия между входным напряжением системы управления тиристорным преобразователем и действительным значением тока якоря электродвигателя автоматически увеличивается угол управления в реверсивном тиристорном преобразователе в одном режиме и уменьшается в другом. Это приводит в реверсивном электроприводе постоянного тока к большим пульсациям тока якоря электродвигателя и, соответственно, к больц1им пульсациям скорости вращения электродвигателя, т. е. к возникновению субгармонических колебаний скорости и тока электродвигателя. Все это ведет к уменьшению предельного диапазона регулирования скорости вращения, к ухудшению динамических характеристик реверсивного тиристорного электропривода постоянного тока, а именно суже
нию полосы пропускания частот электропривода.
Цель изобретения - улучшение динамических показателей электропривода постоянного тока с реверсивным тиристорным преобразователем путем уменьшения пульсаций тока якоря и частоты вращения электродвигателя.
Указанная цель достигается тем, что согласно способу управления тиристорным
электроприводом дополнительно определяют знак входного напряжения системы управления реверсивным тиристорным преобразователем и при положительном значении упомянутого напряжения заполняют паузы тока в режиме прерывистого тока реверсив ного тиристорного преобразователя положительными импульсами тока от неуправляемого источника питания, а при отрицательном значении упомянутого напряжения-переключают на обратную полярность неуправQ ляемый источник питания и заполняют паузы тока в режиме прерывистого тока -отрицательными импульсами тока от неуправляемого источника питания, причем амплитуду импульсов тока от неуправляемого источника питания поддерживают пропорциональ5 ной модулю входного напряжения системы управления реверсивным тиристорным преобразователем.
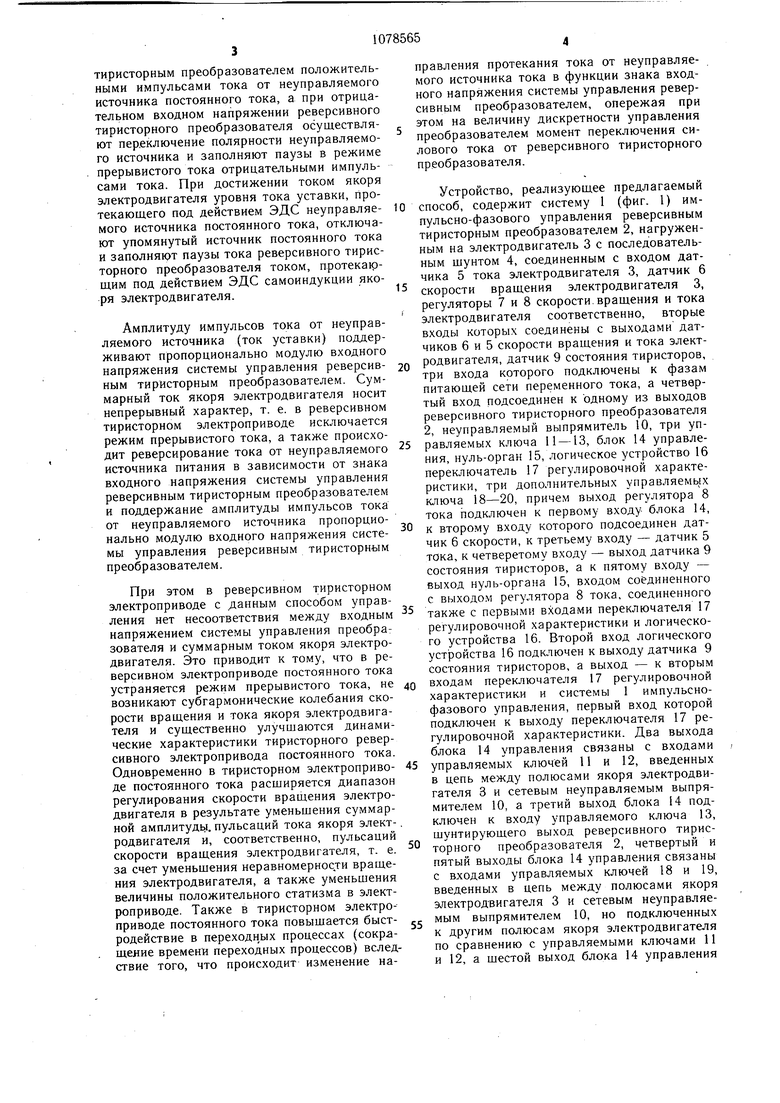
На фиг. 1 изображена функциональная схема устройства для управления тиристорным реверсивным электроприводом; на
0 фиг. 2 - функциональная схема блока управления; на фиг. 3 - временная диаграмма поясняющая работу электропривода.
Способ управления реверсивным тиристорным электроприводом заключается в следующем.
В электроприводе с реверсивным тиристорным преобразователем с импульсно-фазовым .управлением происходит сравнение модуля напряжения на входе системы управления реверсивным тиристорным преобра0 зователем и модуля ЭДС электродвигателя, измерение тока электродвигателя, а также определение знака входного напряжения системы управления реверсивным тиристорным преобразователем. При положительном знаке разности между модулем напряжения
5 на входе системы управления реверсивного тиристорного преобразователя и модулем ЭДС электродвигателя включают реверсивный тиреисторный преобразователь и угол управления изменяют согласно входному напряжению системы управления преобразователеМ;
При отрицательном знаке разности между упомянутыми напряжениями и уменьшении тока силовой цепи реверсивного тиристорного преобразователя до нуля заполняют
g паузы тока реверсивного тиристорного преобразователя в режиме прерывистого тока при положительном знаке входного напряжения системы управления реверсивным
тиристорным преобразователем положительными импульсами тока от неуправляемого источника постоянного тока, а при отрицательном входном напряжении реверсивного тиристорного преобразователя осуществляют переключение полярности неуправляемого источника и заполняют паузы в режиме прерывистого тока отрицательными импульсами тока. При достижении током якоря электродвигателя уровня тока уставки, Протекающего под действием ЭДС неуправляемого источника постоянного тока, отключают упомянутый источник постоянного тока и заполняют паузы тока реверсивного тиристорного преобразователя током, протекакзщим под действием ЭДС самоиндукции якоря электродвигателя.
Амплитуду импульсов тока от неуправляемого источника (ток уставки) поддерживают пропорционально модулю входного напряжения системы управления реверсивным тиристорным преобразователем. Суммарный ток якоря электродвигателя носит непрерывный характер, т. е. в реверсивном тиристорном электроприводе исключается режим прерывистого тока, а также происходит реверсирование тока от неуправляемого источника питания в зависимости от знака входного напряжения системы управления реверсивным тиристорным преобразователем и поддержание амплитуды импульсов тока от неуправляемого источника пропорционально модулю входного напряжения системы управления реверсивным тиристорным преобразователем.
При этом в реверсивном тиристорном электроприводе с данным способом управления нет несоответствия .между входным напряжением системы управления преобраг зователя и суммарным током якоря электродвигателя. Это приводит к тому, что в реверсивном электроприводе постоянного тока устраняется режим прерывистого тока, не возникают субгармонические колебания скорости вращения и тока якоря электродвигателя и существенно улучшаются динамические характеристики тиристорного реверсивного электропривода постоянного тока. Одновременно в тиристорном электроприводе постоянного тока расширяется диапазон регулирования скорости вращения электродвигателя в результате уменьшения суммарной амплитудь. пульсаций тока якоря элект-, родвигателя и, соответственно, пульсаций скорости вращения электродвигателя, т. е. за счет уменьшения неравномерности вращения электродвигателя, а также уменьшения величины положительного статизма в электроприводе. Также в тиристорном электроприводе постоянного тока повышается быстродействие в переходн,ых процессах (сокращение времени переходных процессов) вследствие того, что происходит изменение направления протекания тока от неуправляемого источника тока в функции знака входного напряжения системы управления реверсивным преобразователем, опережая при этом на величину дискретности управления преобразователем момент переключения силового тока от реверсивного тиристорного преобразователя.
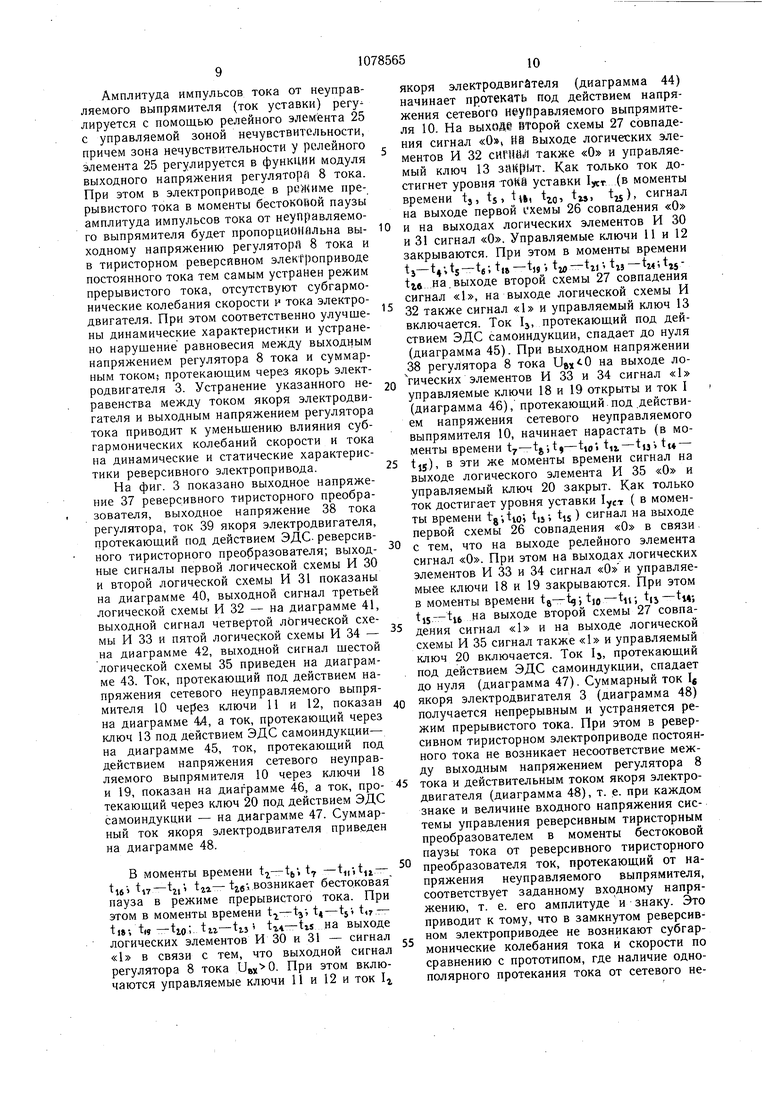
Устройство, реализующее предлагаемый способ, содержит систему 1 (фиг. 1) им0пульсно-фазового управления реверсивным тиристорным преобразователем 2, нагруженным на электродвигатель 3 с последовательным шунтом 4, соединенным с входом датчика 5 тока электродвигателя 3, датчик 6
5 скорости вращения электродвигателя 3, регуляторы 7 и 8 скорости, вращения и тока электродвигателя соответственно, вторые входы которых соединены с выходами датчиков 6 и 5 скорости вращения и тока электродвигателя, датчик 9 состояния тиристоров,
0 три входа которого подключены к фазам питающей сети переменного тока, а четвертый вход подсоединен к одному из выходов реверсивного тиристорного преобразователя 2, неуправляемый выпрямитель 10, три управляемых ключа 11 -13, блок 14 управле5ния, нуль-орган 15, логическое устройство 16 переключатель 17 регулировочной характеристики, три дополнительных управляемой ключа 18-20, причем выход регулятора 8 тока подключен к первому входу блока 14,
0 к второму входу которого подсоединен датчик 6 скорости, к третьему входу - датчик 5 тока, к четверетому входу - выход датчика 9 состояния тиристоров, а к пятому входу - выход нуль-органа 15, входом соединенного с выходом регулятора 8 тока, соединенного
5 также с первыми входами переключателя 17 регулировочной характеристики и логического устройства 16. Второй вход логического устройства 16 подключен к выходу датчика 9 состояния тиристоров, а выход - к вторым входам переключателя 17 регулировочной
0 характеристики и системы 1 импульснофазового управления, первый вход которой подключен к выходу переключателя 17 регулировочной характеристики. Два выхода блока 14 управления связаны с входами управляемых ключей 11 и 12, введенных
5 в цепь между полюсами якоря электродвигателя 3 и сетевым неуправляемым выпрямителем 10, а третий выход блока 14 подключен к входу управляемого ключа 13, шунтирующего выход реверсивного тирис0торного преобразователя 2, четвертый и пятый выходы блока 14 управления связаны с входами управляемых ключей 18 и 19, введенных в цепь между полюсами якоря электродвигателя 3 и сетевым неуправляемым выпрямителем 10, но подключенных
5 к другим полюсам якоря электродвигателя по сравнению с управляемыми ключами 11 и 12, а щестой выход блока 14 управления
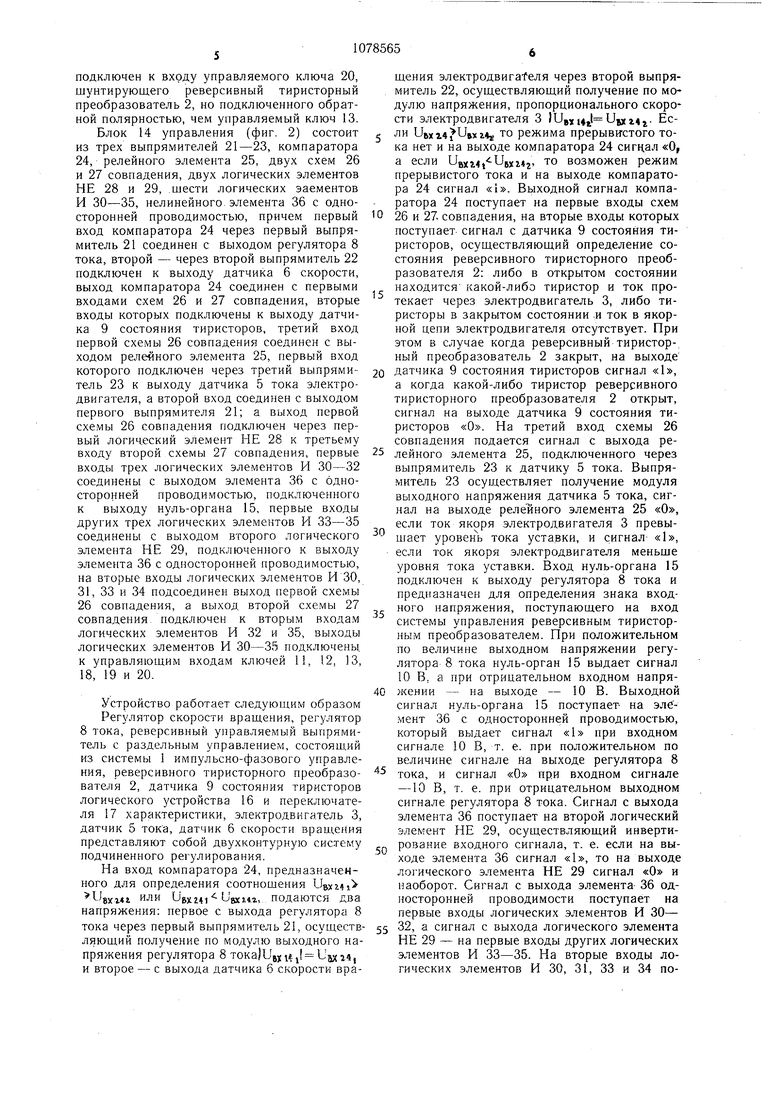
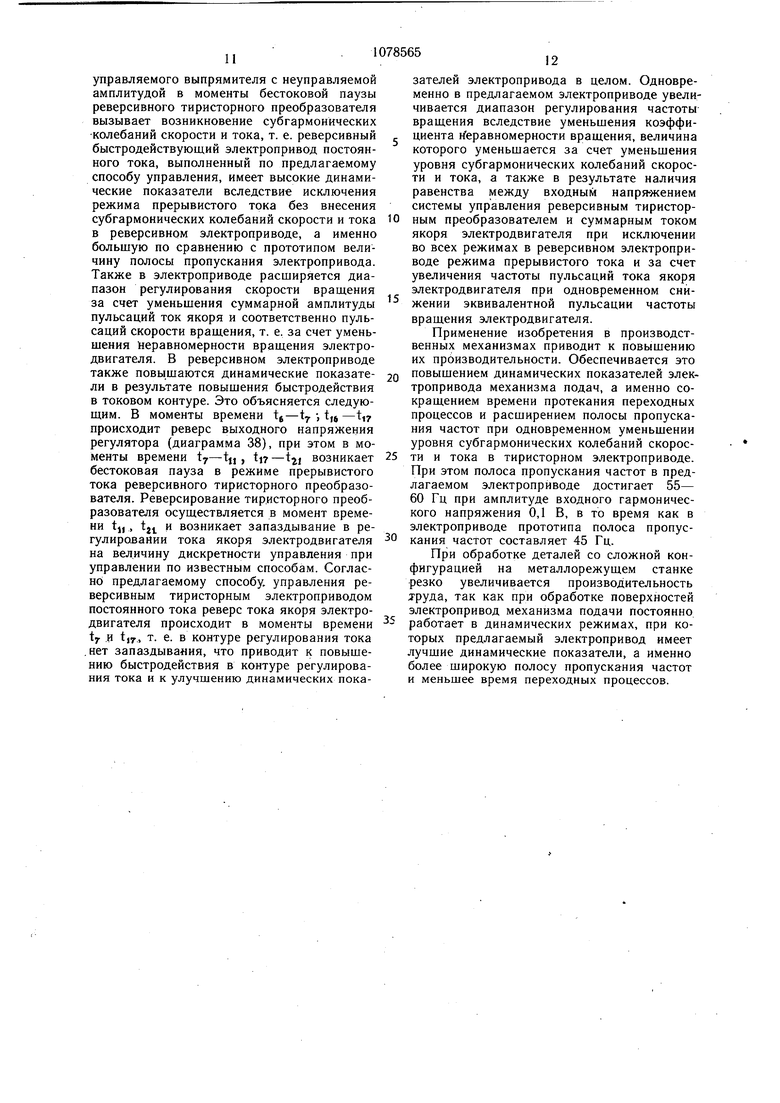
подключен к входу управляемого ключа 20, шунтирующего реверсивный тиристорный преобразователь 2, но подключенного обратной полярностью, чем управляемый ключ 13. Блок 14 управления (фиг. 2) состоит из трех выпрямителей 21-23, компаратора 24, релейного элемента 25, двух схем 26 и 27 совпадения, двух логических элементов НЕ 28 и 29, .шести логических эаементов И 30-35, нелинейного элемента 36 с односторонней проводимостью, причем первый вход компаратора 24 через первый выпрямитель 21 соединен с Выходом регулятора 8 тока, второй - через второй выпрямитель 22 подключен к выходу датчика 6 скорости, выход компаратора 24 соединен с первыми входами схем 26 и 27 совпадения, вторые входы которых подключены к выходу датчика 9 состояния тиристоров, третий вход первой схемы 26 совпадения соединен с выходом релейного элемента 25, первый вход которого подключен через третий выпрямитель 23 к выходу датчика 5 тока электродвигателя, а второй вход соединен с выходом первого выпрямителя 21; а выход первой схемы 26 совпадения подключен через первый логический элемент НЕ 28 к третьему входу второй схемы 27 совпадения, первые входы трех логических элементов И 30-32 соединены с выходом элемента 36 с односторонней проводимостью, подключенного к выходу нуль-органа 15, первые входы других трех логических элементов И 33-35 соединены с выходом второго логического элемента НЕ 29, подключенного к выходу элемента 36 с односторонней проводимостью, на вторые входы логических элементов И 30, 31, 33 и 34 подсоединен выход нервой схемы 26 совпадения, а выход второй схемы 27 совпадения, подключен к вторым входам логических элементов И 32 и 35, выходы логических элементов И 30-35 подключены, к управляюпдим входам ключей 11, 12, 13, 18, 19 и 20.
Устройство работает следуюпд.им образом Регулятор скорости вращения, регулятор 8 тока, реверсивный управляемый выпрямитель с раздельным управлением, состоящий из системы 1 импульсно-фазового управления, реверсивного тиристорного преобразователя 2, датчика 9 состояния тиристоров логического устройства 16 и переключателя 17 характеристики, электродвигатель 3, датчик 5 тока, датчик 6 скорости вращения представляют собой двухконтурную систему подчиненного регулирования.
На вход компаратора 24, предназначенного для определения соотношения U x:i4ii ъугч И-1И U6Xi4i bB), подаются два напряжения: первое с выхода регулятора 8 тока через первый выпрямитель 21, осуществляющий получение по модулю выходного напряжения регулятора 8 TOKa)Ujjij.j U5xa4, и второе - с выхода датчика 6 скорости вращения электродвигателя через второй выпрямитель 22, осуществляющий получение по модулю напряжения, пропорционального скорости электродвигателя 3 Ш, 14 Ujx гчг
ли Ubxi4 UBXi4s то режима прерыви-стого тока нет и на выходе компаратора 24 сигнал «О, а если UBXJ.IJ UJJUJ, то возможен режим прерывистого тока и на выходе компаратора 24 сигнал «i. Выходной сигнал компаратора 24 поступает на первые входы схем
26 и 27 совпадения, на вторые входы которых поступает сигнал с датчика 9 состояния тиристоров, осуществляющий определение состояния реверсивного тиристорного преобразователя 2: либо в открытом состоянии находится какой-либо тиристор и ток протекает через электродвигатель 3, либо тиристоры в закрытом состоянии .и ток в якорной цепи электродвигателя отсутствует. При этом в случае когда реверсивный тиристорный преобразователь 2 закрыт, на выходе
0 датчика 9 состояния тиристоров сигнал «1, а когда какой-либо тиристор реверсивного тиристорного преобразователя 2 открыт, сигнал на выходе датчика 9 состояния тиристоров «О. На третий вход схемы 26 совпадения подается сигнал с выхода ре5 лейного элемента 25, подключенного через выпрямитель 23 к датчику 5 тока. Выпрямитель 23 осуществляет получение модуля выходного напряжения датчика 5 тока, сигнал на выходе релейного элемента 25 «О, если ток якоря электродвигателя 3 превыщает уровен тока уставки, и сигнал- «1, если ток якоря электродвигателя меньше уровня тока уставки. Вход нуль-органа 15 подключен к выходу регулятора 8 тока и предназначен для определения знака входного напряжения, поступающего на вход системы управления реверсивным тиристорным преобразователем. При положительном по величине выходном напряжении регулятора 8 тока нуль-орган 15 выдает сигнал 10 В. а при отрицательном входном напря0 жен и и - на выходе - 10 В. Выходной сигнал нуль-органа 15 поступает- на элемент 36 с односторонней проводимостью, который выдает сигнал «1 при входном сигнале 10 В, т. е. при положительном по величине сигнале на выходе регулятора 8
тока, и сигнал «О при входном сигнале -10 Б, т. е. при отрицательном выходном сигнале регулятора 8 тока. Сигнал с выхода элемента 36 поступает на второй логический элемент НЕ 29, осуществляющий инверти рование входного сигнала, т. е. если на выходе эле.мента 36 сигнал «1, то на выходе логического элемента НЕ 29 сигнал «О и наоборот. Сигнал с выхода элемента- 36 односторонней проводимости поступает на первые входы логических элементов И 30-
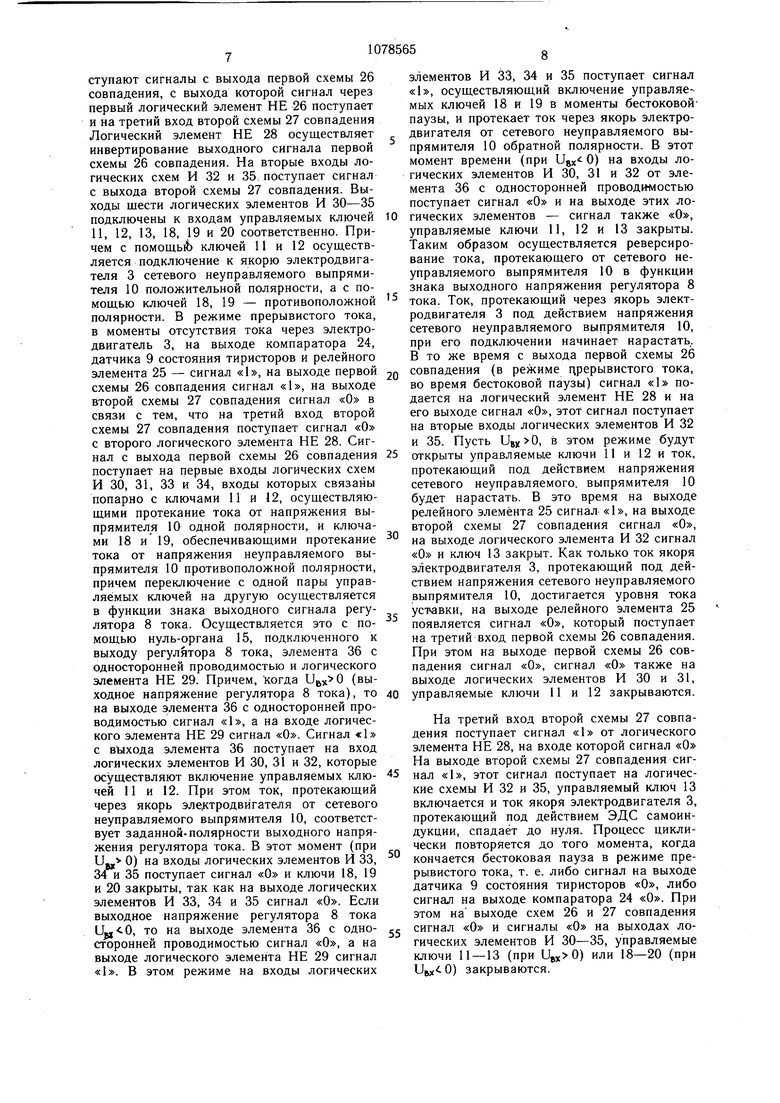
5 32, а сигнал с выхода логического элемента НЕ 29 - на первые входы других логических элементов И 33-35. На вторые входы логических элементов И 30, 31, 33 и 34 поступают сигналы с выхода первой схемы 26 совпадения, с выхода которой сигнал через первый логический элемент НЕ 26 поступает и на третий вход второй схемы 27 совпадения Логический элемент НЕ 28 осуществляет инвертирование выходного сигнала первой схемы 26 совпадения. На вторые входы логических схем И 32 и 35.поступает сигнал с выхода второй схемы 27 совпадения. Выходы шести логических элементов И 30-35 подключены к входам управляемых ключей 11, 12, 13, 18, 19 и 20 соответственно. Причем с помощый ключей 11 и 12 осуществляется подключение к якорю электродвигателя 3 сетевого неуправляемого выпрямителя 10 положительной полярности, а с помощью ключей 18, 19 - противоположной полярности. В режиме прерывистого тока, в моменты отсутствия тока через электродвигатель 3, на выходе компаратора 24, датчика 9 состояния тиристоров и релейного элемента 25 - сигнал «1, на выходе первой схемы 26 совпадения сигнал «1, на выходе второй схемы 27 совпадения сигнал «О в связи с тем, что на третий вход второй схемы 27 совпадения поступает сигнал «О с второго логического элемента НЕ 28. Сигнал с выхода первой схемы 26 совпадения поступает на первые входы логических схем И 30, 31, 33 и 34, входы которых связаны попарно с ключами 11 и 12, осуществляющими протекание тока от напряжения выпрямителя 10 одной полярности, и ключами 18 и 19, обеспечивающими протекание тока от напряжения неуправляемого выпрямителя 10 противоположной полярности, причем переключение с одной пары управляемых ключей на другую осуществляется в функции знака выходного сигнала регулятора 8 тока. Осуществляется это с помощью нуль-органа 15, подключенного к выходу регулятора 8 тока, элемента 36 с односторонней проводимостью и логического элемента НЕ 29. Причем, когда (выходное напряжение регулятора 8 тока), то на выходе элемента 36 с односторонней проводимостью сигнал «1, а на входе логического элемента НЕ 29 сигнал «О. Сигнал «1 с вУхода элемента 36 поступает на вход логических элементов И 30, 31 и 32, которые осуществляют включение управляемых ключей 11 и 12. При этом ток, протекающий через якорь элe тpoдвигaтeля от сетевого неуправляемого выпрямителя 10, соответствует заданной, полярности выходного напряжения регулятора тока. В этот момент (при Uj 0) на входы логических элементов И 33, 34 и 35 поступает сигнал «О и ключи 18, 19 и 20 закрыты, так как на выходе логических элементов И 33, 34 и 35 сигнал «О. Если выходное напряжение регулятора 8 тока Uj,0, то на выходе элемента 36 с односторонней проводимостью сигнал «О, а на выходе логического элемента НЕ 29 сигнал «1. В этом режиме на входы логических
элементов И 33, 34 и 35 поступает сигнал «1, осуществляющий включение управляемых ключей 18 и 19 в моменты бестоковойпаузы, и протекает ток через якорь электродвигателя от сетевого неуправляемого выпрямителя 10 обратной полярности. В этот момент времени (при 0) на входы логических элементов И 30, 31 и 32 от элемента 36 с односторонней проводжиостью поступает сигнал «О и на выходе этих логических элементов - сигнал также «О, управляемые ключи 11, 12 и 13 закрыты. Таким образом осуществляется реверсирование тока, протекающего от сетевого неуправляемого выпрямителя 10 в функции знака выходного напряжения регулятора 8 тока. Ток, протекающий через якорь электродвигателя 3 под действием напряжения сетевого неуправляемого выпрямителя 10, при его подключении начинает нарастать. В то же время с выхода первой схемы 26 совпадения (в режиме црерывистого тока, во время бестоковой паузы) сигнал «1 подается на логический элемент НЕ 28 и на его выходе сигнал «О, этот сигнал поступает на вторые входы логических элементов И 32 и 35. Пусть , в этом режиме будут открыты управляемые ключи 11 и 12 и ток, протекающий под действием напряжения сетевого неуправляемого, выпрямителя 10 будет нарастать. В это время на выходе релейного элемента 25 сигнал «1, на выходе второй схемы 27 совпадения сигнал «О, на выходе логического элемента И 32 сигнал «О и ключ 13 закрыт. Как только ток якоря электродвигателя 3, протекающий под действием напряжения сетевого неуправляемого выпрямителя 10, достигается уровня тока уставки, на выходе релейного элемента 25 появляется сигнал «О, который поступает на третий вход первой схемы 26 совпадения. При этом на выходе первой схемы 26 совпадения сигнал «О, сигнал «О также на выходе логических элементов И 30 и 31, управляемые ключи 11 и 12 закрываются.
На третий вход второй схемы 27 совпадения поступает сигнал «1 от логического элемента НЕ 28, на входе которой сигнал «О На выходе второй схемы 27 совпадения сигнал «1, этот сигнал поступает на логические схемы И 32 и 35, управляемый ключ 13 включается и ток якоря электродвигателя 3, протекающий под действием ЭДС самоиндукции, спадает до нуля. Процесс циклически повторяется до того момента, когда кончается бестоковая пауза в режиме прерывистого тока, т. е. либо сигнал на выходе датчика 9 состояния тиристоров «О, либо сигнал на выходе компаратора 24 «О. При этом на выходе схем 26 и 27 совпадения сигнал «О и сигналы «О на выходах логических элементов И 30-35, управляемые ключи 11 -13 (при Uj,0) или 18-20 (при ьх 0) закрываются.
Амплитуда импульсов тока от неуправляемого выпрямителя (ток уставки) регу лируется с помощью релейного элемента 25 с управляемой зоной нечувствительности, причем зона нечувствительности у релейного элемента 25 регулируется в функции модуля выходного напряжения регулятора 8 тока. При этом в электроприводе в режиме прерывистого тока в моменты бестоковой паузы амплитуда импульсов тока от неуправляемого выпрямителя будет пропорциональна выходному напряжению регулятора 8 тока и в тиристорном реверсивном электроприводе постоянного тока тем самым устранен режим прерывистого тока, отсутствуют субгармонические колебания скорости и тока электродвигателя. При этом соответственно улучшены динамические характеристики и устранено нарушение равновесия между выходным напряжением регулятора 8 тока и суммарным ТОКОМ; протекаюш,им через якорь электродвигателя 3. Устранение указанного неравенства между током якоря электродвигателя и выходным напряжением регулятора тока приводит к уменьшению влияния субгармонических колебаний скорости и тока на динамические и статические характеристики реверсивного электропривода.
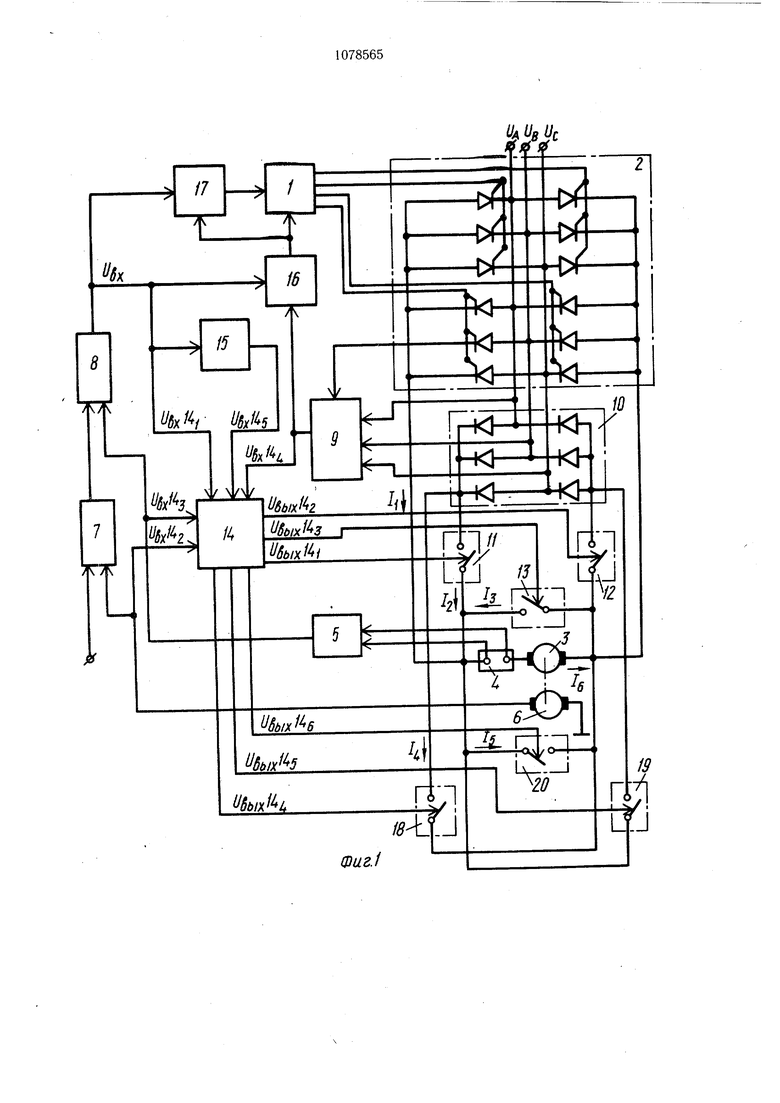
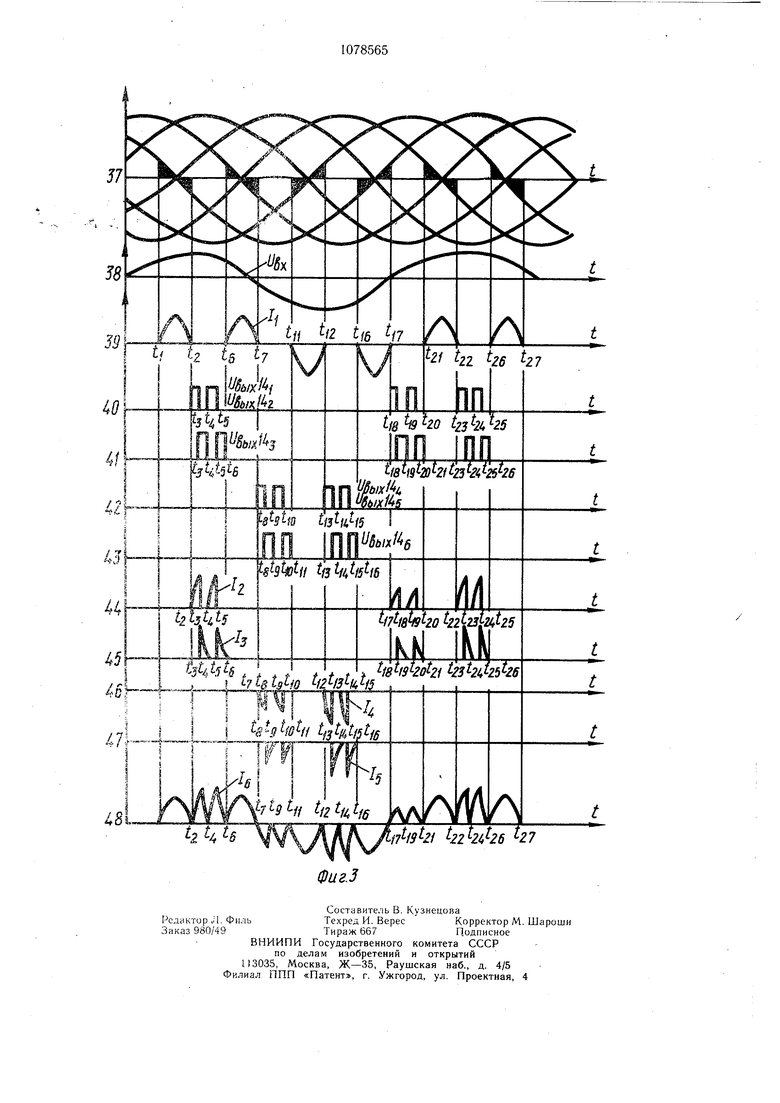
На фиг. 3 показано выходное напряжение 37 реверсивного тиристорного преобразователя, выходное напряжение 38 тока регулятора, ток 39 якоря электродвигателя, протекающий под действием ЭДС. реверсивного тиристорного преобразователя; выходные сигналы первой логической схемы И 30 и второй логической схемы И 31 показаны на диаграмме 40, выходной сигнал третьей логической схемы И 32 - на диаграмме 41, выходной сигнал четвертой логической схемы И 33 и пятой логической схемы И 34 - на диаграмме 42, выходной сигнал шестой логической схемы 35 приведен на диаграмме 43. Ток, протекающий под действием напряжения сетевого неуправляемого выпрямителя 10 через ключи 11 и 12, показан на диаграмме 44, а ток, протекающий через ключ 13 под действием ЭДС самоиндукции- на диаграмме 45, ток, протекающий под действием напряжения сетевого неуправляемого выпрямителя 10 через ключи 18 и 19, показан на диаграмме 46, а ток, протекающий через ключ 20 под действием ЭДС самоиндукции - на диаграмме 47. Суммарный ток якоря электродвигателя приведен на диаграмме 48.
В моменты времени ,, t -t,-, t,j - 16 ,, tji-tje, возникает бестоковая пауза в режиме прерывистого тока. При этом в моменты времени , it - tw -tj.o; til-tij tit-tis на выходе логических элементов И 30 и 31 - сигнал «1 в связи с тем, что выходной сигнал регулятора 8 тока . При этом включаются управляемые ключи 11 и 12 и ток 1
якоря электродвигателя (диаграмма 44) начинает протекать под действием напряжения сетевого неуправляемого выпрямителя 10. На выходе второй схемы 27 совпадения сигнал «О, Hi выходе логических элементов И 32 сигнал также «О и управляемый ключ 13 закрыт. Как только ток достигнет уровня тока уставки Iyer (в моменты времени tj, ts, «, , iu, t), сигнал на выходе первой схемы 26 совпадения «О и на выходах логических элементов И 30 и 31 сигнал «О. Управляемые ключи 11 и 12 закрываются. При этом в моменты времени
tj-t vtj--tj-, t,j -tj9 , tjj -tjj , tjj -tyltjjtt6 на.выходе второй схемы 27 совпадения сигнал «1, на выходе логической схемы И
32 также сигнал «1 и управляемый ключ 13 включается. Ток 1, протекающий под действием ЭДС самоиндукции, спадает до нуля (диаграмма 45). При выходном напряжении 38 регулятора 8 тока на выходе лоQ гических элементов И 33 и 34 сигнал «1 управляемые ключи 18 и 19 открыты и ток I (диаграмма 46), протекающий под действием напряжения сетевого неуправляемого выпрямителя 10, начинает нарастать (в моменты времени ty-tj-, t,-tj3-, in -
5 tj5), в эти же моменты времени сигнал на выходе логического элемента И 35 «О и управляемый ключ 20 закрыт. Как только ток достигает уровня уставки lyct ( в моменты времени tg-,ttoi ц-, ) сигнал на выходе первой схемы 26 совпадения «О в связи
0 с тем, что на выходе релейного элемента сигнал «О. При этом на выходах логических элементов И 33 и 34 сигнал и управляемыее ключи 18 и 19 закрываются. При этом в моменты времени tg-tq-, tjg-tji; tjj-t -, tij-tij на выходе второй схемы 27 совпа5 дения сигнал «1 и на выходе логической схемы И 35 сигнал также «1 и управляемый ключ 20 включается. Ток Ij, протекающий под действием ЭДС самоиндукции, спадает до нуля (диаграмма 47). Суммарный ток Ij
0 якоря электродвигателя 3 (диаграмма 48) получается непрерывным и устраняется режим прерывистого тока. При этом в реверсивном тиристорном электроприводе постоянного тока не возникает несоответствие между выходным напряжением регулятора 8
5 тока и действительным током якоря электродвигателя (диаграмма 48), т. е. при каждом знаке и величине входного напряжения системы управления реверсивным тиристорным преобразователем в моменты бестоковой паузы тока от реверсивного тиристорного
преобразователя ток, протекающий от напряжения неуправляемого выпрямителя, соответствует заданному входному напряжению, т. е. его амплитуде и знаку. Это приводит к тому, что в замкнутом реверсивном электроприводее не возникают субгармонические колебания тока и скорости по сравнению с прототипом, где наличие однополярного протекания тока от сетевого неуправляемого выпрямителя с неуправляемой амплитудой в моменты бестоковой паузы реверсивного тиристорного преобразователя вызывает возникновение субгармонических колебаний скорости и тока, т. е. реверсивный быстродействующий электропривод постоянного тока, выполненный по предлагаемому способу управления, имеет высокие динамические показатели вследствие исключения режима прерывистого тока без внесения субгармонических колебаний скорости и тока в реверсивном электроприводе, а именно большую по сравнению с прототипом величину полосы пропускания электропривода. Также в электроприводе расширяется диапазон регулирования скорости вращения за счет уменьшения суммарной амплитуды пульсаций ток якоря и соответственно пульсаций скорости вращения, т. е. за счет уменьшения неравномерности врашения электродвигателя. В реверсивном электроприводе также повышаются динамические показатели в результате повышения быстродействия в токовом контуре. Это объясняется следующим. В моменты времени tj-t,. , t,j -t, происходит реверс выходного напряжения регулятора (диаграмма 38), при этом в моменты времени ij-tjj , tj возникает бестоковая пауза в режиме прерывистого тока реверсивного тиристорного преобразователя. Реверсирование тиристорного преобразователя осуществляется в момент времени tj, , tji и возникает запаздывание в регулировании тока якоря электродвигателя на величину дискретности управления при управлении по известным способам. Согласно предлагаемому способу., управления реверсивным тиристорным электроприводом постоянного тока реверс тока якоря электродвигателя происходит в моменты времени tf и t,7., Т. е. в контуре регулирования тока . нет запаздывания, что приводит к повыщению быстродействия в контуре регулирования тока и к улучшению динамических показателей электропривода в целом. Одновременно в предлагаемом электроприводе увеличивается диапазон регулирования частоты вращения вследствие уменьшения коэффициента Неравномерности вращения, величина которого уменьшается за счет уменьшения уровня субгармонических колебаний скорости и тока, а также в результате наличия равенства между входным напряжением системы управления реверсивным тиристорным преобразователем и суммарным током якоря электродвигателя при исключении во всех режимах в реверсивном электроприводе режима прерывистого тока и за счет увеличения частоты пульсаций тока якоря электродвигателя при одновременном снижении эквивалентной пульсации частоты вращения электродвигателя. Применение изобретения в производственных механизмах приводит к повыщению их производительности. Обеспечивается это повышением динамических показателей электропривода механизма подач, а именно сокращением времени протекания переходных процессов и расширением полосы пропускания частот при одновременном уменьшении уровня субгармонических колебаний скорости и тока в тиристорном электроприводе. При этом полоса пропускания частот в предлагаемом электроприводе достигает 55- 60 Гц при амплитуде входного гармонического напряжения 0,1 В, в то время как в электроприводе прототипа полоса пропускания частот составляет 45 Гц. При обработке деталей со сложной конфигурацией на металлорежушем станке резко увеличивается производительность руда, так как при обработке поверхностей электропривод механизма подачи постоянно работает в динамических режимах, при которых предлагаемый электропривод имеет лучшие динамические показатели, а именно более широкую полосу пропускания частот и меньшее время переходных процессов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления тиристорным электроприводом и устройство для его осуществления | 1980 |
|
SU879723A1 |
| Реверсивный электропривод | 1988 |
|
SU1667213A1 |
| Реверсивный вентильный электропривод | 1983 |
|
SU1141552A1 |
| Реверсивный вентильный электропривод | 1988 |
|
SU1598097A1 |
| Реверсивный вентильный электропривод постоянного тока | 1978 |
|
SU758450A1 |
| РЕВЕРСИВНЫЙ ТИРИСТОРНЫЙ ЭЛЕКТРОПРИВОД | 1995 |
|
RU2103797C1 |
| РЕВЕРСИВНЫЙ ТИРИСТОРНЫЙ ЭЛЕКТРОПРИВОД | 1992 |
|
RU2079963C1 |
| Устройство для управления электродвигателем постоянного тока | 1978 |
|
SU758451A1 |
| Система управления реверсивным тиристорным электроприводом | 1975 |
|
SU566293A1 |
| Электропривод | 1987 |
|
SU1534723A1 |
СПОСОБ УПРАВЛЕНИЯ ТИРИСТОРНЫМ ЭЛЕКТРОПРИВОДОМ по авт. св. № 879723, отличающийся тем, что, с целью улучшения динамических показателей электропривода постоянного тока с реверсивным тиристорным преобразователем путем уменьшения Пульсаций тока якоря и частоты вращения электродвигателя, дополнительно определяют знак входного напряжения системы управления реверсивным тиристорным преобразователем и при положительном значении этого напряжения заполняют паузы тока в режиме прерывистого тока реверсивного тиристорного преобразователя положительными импульсами тока от неуправляемого источника питания, а при отрицательном значении этого напряжения переключают неуправляемый источник питания на обратную полярность и заполняют паузы в режиме прерывистого тока отрицательными импульсами тока от неуправляемого источника питания при этом амплитуду импульса тока от неуправляемого источника питания поддерживают пропорi циональной модулю входного напряжения tHCTeMbi управления реверсивным тиристор(Л ным преобразователем.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Способ управления тиристорным электроприводом и устройство для его осуществления | 1980 |
|
SU879723A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
