&д 4:
N5
изобретение относится к измерительной технике и может быть использовано для дистангшонного измерения угловых координат н взаимных угловых перемещений.
Цаль изобретения - расширение области прь меиения путем увеличения- дистанции измерения в результате увеличения эффективной мощности источника света.
На чертеже представлена функцио- на.пьна.я схема устройства при: использовании fi ByTi изл-/чающкх элементов,,
бражейия являются выходы элементов 15 и 16 деления.
Излучающие элементы 1 и 2 расположены в главной гшоскости объектива 1 за пределами его рабочей зоны симметрично относительно главной оптической оси объектива 1. Когда количество излучающих элементов равно некоторому числу ;М, эти излучающие элементы размещены в главной плоскости объектива 1 за пределами его рабочей зоны таким образом, чтобы проекция на фоточувстви-тельяую поверх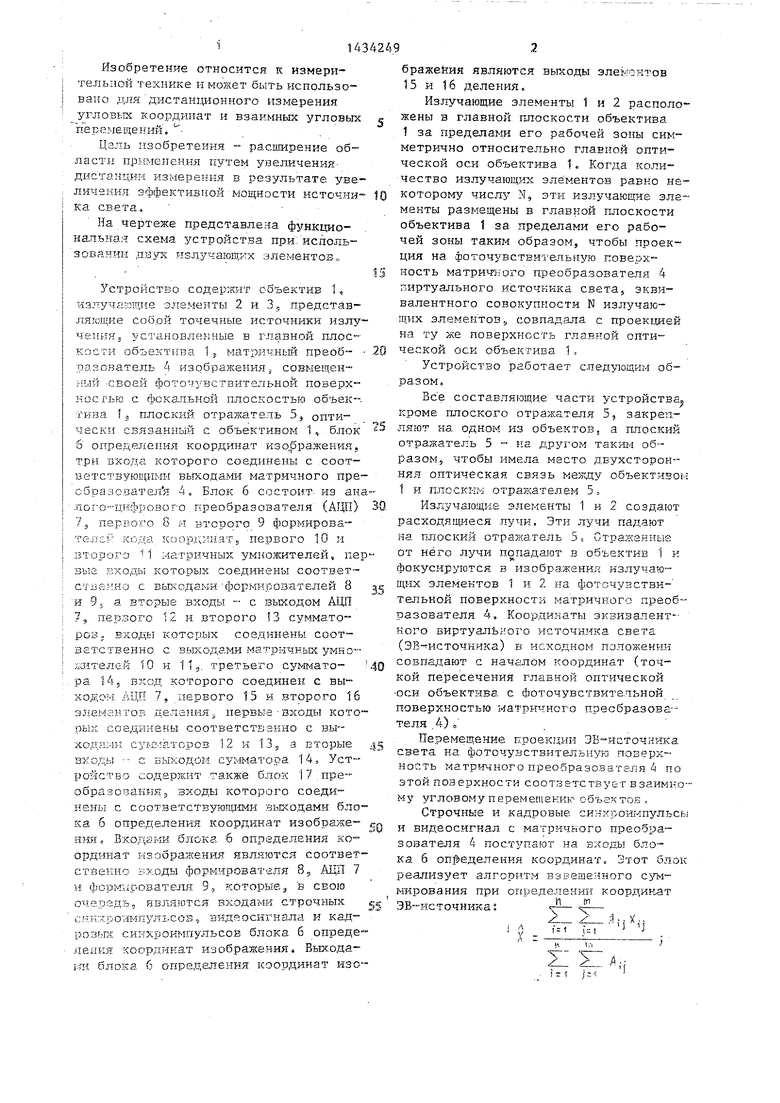
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения взаимного углового перемещения двух объектов | 1984 |
|
SU1270564A1 |
| Устройство для измерения расстояния между центрами двух изображений точечного объекта | 1990 |
|
SU1788597A1 |
| Способ измерения положения объекта | 1986 |
|
SU1348644A1 |
| Лазерный тренажер для обучения стрельбе из стрелкового оружия | 1990 |
|
SU1784829A1 |
| Устройство для контроля качества телевизионного изображения | 1989 |
|
SU1778914A1 |
| Акустооптоэлектронный спектроанализатор | 1988 |
|
SU1613971A1 |
| ТЕЛЕВИЗИОННЫЙ ПРОЕКТОР | 1994 |
|
RU2099902C1 |
| ЦИФРОВАЯ СИСТЕМА СТЕРЕОТЕЛЕВИДЕНИЯ | 2004 |
|
RU2256298C1 |
| ПРИКЛАДНАЯ ТЕЛЕВИЗИОННАЯ СИСТЕМА | 2005 |
|
RU2284672C1 |
| СИСТЕМА СТЕРЕОТЕЛЕВИДЕНИЯ | 2006 |
|
RU2326508C1 |
Изобретение относится к измерительной технике. Целью изобретения являются расширение области применения за счет увеличения дистанции измерения путем увеличения мощности источника света. Цель достигается размещением излучающих элементов 2 и 3 в главной плоскости объектива 1 за пределами его рабочей зоны таким образом, что виртуальный источник света, эквивалентный совокупности излучающих элементов 2 и 3, расположен на главной оптической оси объектива 1 . 1 ил.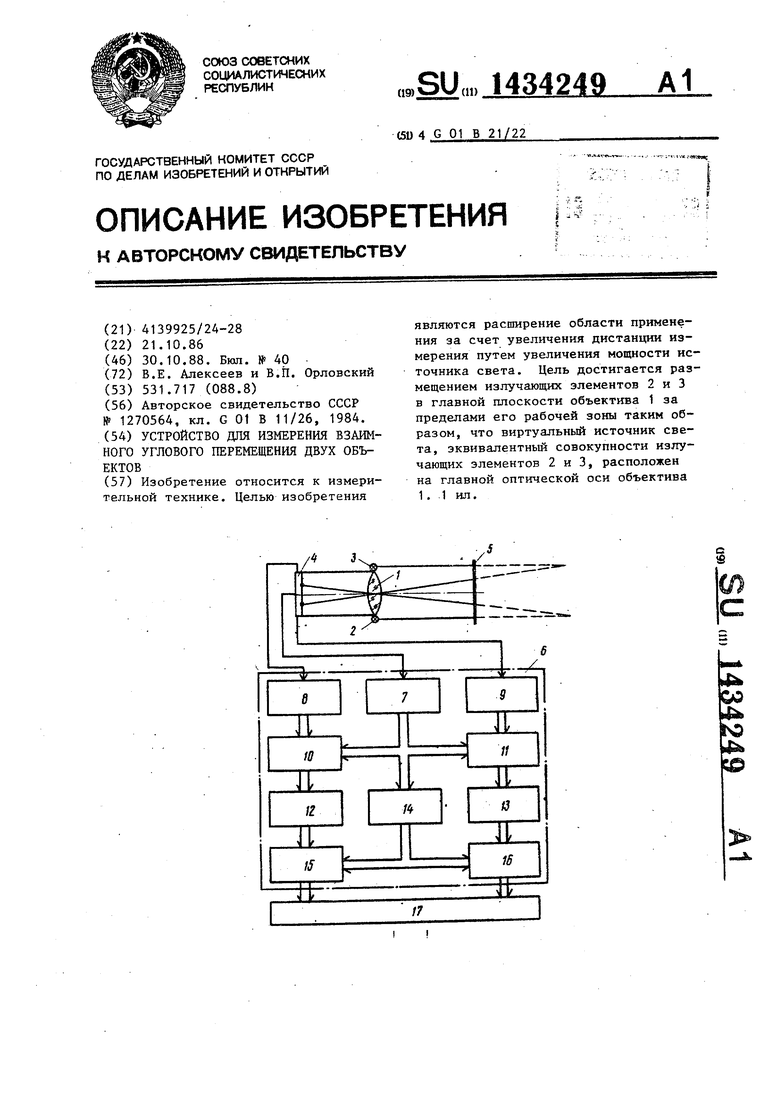
Устройство содержит объектив I, излучающие злементы 2 и 3, представляющие собой точечные источники излу чеиияз становленные в главной плос- кости объектива 1j матричньй преоб- разователь 4 изображения,, совмеше.н ный -cBoeH фоточувсТБИтельной поверх- носгью с фокальной плоскостью объектива Ij плосрсий отражатель 5, оптически связанный с объективом 1, блок
6определения координат изо бражения, три входа которого соединены с соответствующими выходами матричного пре- образозател я 4. Блок 6 состоит- из ана лог о-цифрового преобразователя (А1-Щ)
75 перво;го 8 я второго 9 формирова- коорд щат первого 10 и второго матричных умножителей, пер вые входы которых соединены соответственно с вькодами формирователей 8 и 9s а вторые входы - с вькодом А1Щ
7,, первого 12 и второго 13 сумматоров., входы которых сое/динень соответственно с выходами матричных умножителей 10 и 113- третьего cy мaтo- ра 14, вход которого соединен с выходом АЦП 7. первого 15 и второго 16 элемантов деления,, первые-входы кото pfcjx соединены соответстБзкно с выходами сз Ь1г- аторов 12 к 13; а вторые входы -- с выходом суг матора 14 Уст- ройс-тв-э содержит также блок 17 преобразования j входы которого соединены с соответствз юш-ши выходами блока б определения координат изображе- НШ1. Входами блока 6 определения ко™ ординат нзобраяения являются соответственно входы формирователя 8, АЦП 7 и форм;1.рователя 9,, которые в свою очер-здь, глзляготся входами строчных синхроимпульсов, видеосигнала и кад- ровьпс синхрои пульсоЕ блока б определения координат изображения. Выхода- 1-я5 блока
15 ность матри пюго преобразователя 4
виртуального источника света; эквивалентного совокупности N излучающих элементов,, совпадала с проекцией на ту же поверхность главной оптической оси объектива 1
Устройство работает следующим образом.
Вс е составляющие части устройства, кроме плоского отражателя 5, закрепляют на одном из объектов, а плоский отражатель 5 на другом такиь- образом, чтобы имела место двухсторонняя оптическая связь между объективом 1 и плоским отражателем 5,
Излучающие элементы 1 и 2 создают расходящиеся лучи. Эти лучи падают на плоский отражатель 5 Отралсенные от него лучи попадают в объектив 1 и фокусируются в изображения излучающих элементов 1 и 2 на фоточувстви- телькой поверхности матричного преобразователя 4, Координаты эквивалент-- ного виртуального источника света (ЭВ-источника) в исходном положении совпадают с началом координат (точкой пересечения главной оптической оси объектива с фоточувствительной поверхностью матричного пресбразова-- теля .4)о
Перемещение проекции ЗВ -источ1-;ика света на фоточувстви-тельнум поверхность матр -5чного преобразователя 4 по этой поверхности соответствует взаимному угловому перемещению объектов,
Строчные и кадровые синхроимпульс и видеосигнал с матричного преобразователя 4 постз пают на входы блока 6 оп1%еделения координат. Этот блок реализует алгоритм взвешенного суь ffflpoaaHHH при определении координат
ЗВ-источника;
Т
У
/S..-;
(1)
Ч
точника;
амплитуда сигнала для i
j отсчета с координатами
X ij , Y ij: число стр
п - число строк растра; m - число элементов вдоль
строки.
Сигналы с выходов матричного преобразователя 4 преобразуются форм}1ро вателями 8 и 9 в двоичный код, который поступает на входы матричных умножителей 10 и 11 и на сумматор 14, в котором формируется сумма
и гг 2Z5lA,.j. (2)
jt:l У
С выходов синхронизации матричного преобразователя 4 снимаются сигналы управления разверткой по строкам и кадру, на основе которых в формирователях 8 и 9 координаты X и Y трансформируются в цифровой форме в коды координат X,: и . Эти коды поступают далее на первьш и второй матричные умножители 10 и 11, результаты умножения подаются на первый и второй сумматоры 12 и 13, на выходах которых формируются цифровые коды cyiviM:
ri V
AjjY,,
Цифровые коды указанных сумм с выходов сумматоров 12 и 13 поступают на первые входы элементов 15 и 16 деления, на вторые входы которых с сум- матора 14 подается код суммы
h
А:
Ч
(4)
С выходов элементов 15 и 16 деления; снимается цифровой код оценок координат ЭВ-источника X и Y в соответствии с алгоритмом (1), которьш . дешифруется и отображается на индикаторной панели блока 17 преобразования в угловых единицах.
1434249
Формула
изобретения
-
10
15
20
25
30
35
40
-
45
50
55
Устройство йля измерения взаимно-v го углового перемещения двух объектов, содержащее источник света, объектив, установленкьш по ходу светового луча, матричный пресбразова-- тель изображения, фоточувстзктельная поверхность которого совмещена с фокальной плоскостью объектива, плоский отражатель, оптически связанньй с объективом, блок определения координат изображения, тремя входашг соединенный с соотве-7 ст в1.то1цимн EbixoAaMH матричного преобразователя изображения и состоящий из первого и второго формирователей кода коогдннгт и аналого-цифрового преобразователя входы которого являются соответственно входами строчных си нхрои-тз льсов, кадровых синхрокмпульсоз к Еидеос тг- нала блока определения коогдмма т изображения, первого и второго мат ричных умножителей; первые входы которых соединены ссответственно с выходами первого и второго фор1Ч1.ропа- телей кода коордшгат, а вторые входы - с выходом аналого-щ фрового преобразователя.,первого и второго сумматоров, входы которых соединены соответственно с выхода л1 первого и второго матричных умкоясителей, третьего сумматораj зход которого соединен с выходом аналого-цифрового
Преобразователя, первого и второго элементов деления, первые входы ко-. торых соединены соответственно с вы;ходами первого и второго сумматоровj
: а вторые входы - с выходом третьего сумматора; и блок преобразован -, входами соединенный с соответствующт - ми выходами блока определения координат изображения 5 которьми являются соответственно выходы первого и второго элементов деления, отлит чающееся тем, что, с целью расширения области примененная щ тем увеличения дистанции измерения путем увеличения эффективной мооиюсти источника света, источник света выполнен в виде совокупности излучанщих элементов, размещенных в главной плоскости объектива за пределаг-ш его
Jpaбoчeй зоны таким образом, что виртуальный источник светаэ эквивалентный совокупности излучающих элемен-- тов, располагается на главной оптической оси объектива
| Устройство для измерения взаимного углового перемещения двух объектов | 1984 |
|
SU1270564A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
