1
Изобретение относится к измерительной технике и может быть применено при измерении перемещений объектов.
Цель изобретения - увеличение точности измерения за счет увеличения информативности способа путем восстановления огибающей дискретного видеосигнала, полученного с линейно-матричного фотоприемника, и вычисления координаты энергетического центра огибающей, дискретизированной с частотой большей частоты дискретизации первичного видеосигнала.
На чертеже представлена схема устройства, реализующего предлагаемый способ.
Устройство содержит оптически связанные источник 1 света, диафрагму 2, блок 3 формирования изображения диафрагмы и линейно-матричный фотоприемник 4, блок 5 управления фотоприемником, первый выход Которого соединен с управляю цим входом фотоприемника, а второй выход - с управляющим входом блока 6 выборки, информационный вход которбго соединен с выходом фотоприемника 4, а выход - с входом блока 7 восстановления огибающей, последовательно соединенного с аналого-цифровым преобразователем 8, генератор 9, синхронизирующий вход которого соединен с третьим выходом блока 5 управления фотоприемником, а выход - с тактовым входом блока 10 вычисления координаты, информационный вход которого соединен с выходом аналого-цифрового преобразователя 8, а вход налинейно-матричного фотоприемника в дискретный видеосигнал с периодом
дискретизации Т,, восстанавливают
10
20
огибающую дискретного видеосигнала, дискретизируют огибающую с периодом дискретизации Т Т, , преобразуют дискретные значения U; огибающей в двоичный код, измеряют с дискретом Т временной интервал N, начало которого совпадает с началом опроса фотоприемника, а конец - с последним импульсом дискретного видеосигнала, вычисляют координату R энергетического 15 центра огибающей относительно начала временного интервала N в соответствии с формулой к J
2 Си -- - %-:где k - количество импульсов дискре-г
тизации огибающей. Устройство, реализующее способ, работает следующим образом.
Источник 1 света освещает диафрагму 2, изображение которой, отраженное от объекта 12, переносится блоком 3 формирования изображения диафрагмы с помощью светоделительного элемента 1 30 и объектива 2 на поверхность фотоприемника 4. При изменении положения объекта происходит перемещение изображения диафрагмы 2 на поверхности фотоприемника 4. В начале цикла опроса фотоприемника 4 блок 5 управления фотоприемником формирует сигнал сброса, который с третьего выхода блока 5 управления фотоприемником поступает на входы сброса первого 10.1 и второ- чальной установки - с третьим выходом д го 10.2 накапливающих сумматоров бло- блока 5 управления фотоприемником, ка 10 вычисления координаты, на входы
25
35
информационный выход блока 10 соединен с информационным входом регистратора 11, вход записи которого соединен с управляющим выходом блока 10 вычисления координаты. Блок 10 вычисления координаты содержит первый сумматор 10.1, второй сумматор 10,2, блок 10.3 деления, блок 10.4 вычитания, дискриминатор 10.5, блок 10.6 управления сумматорами, блок 10.7 управления счетчиком,счетчик 10.8, первый элемент 10.9 задержки, второй элемент 10.10 задержки, формирователь 10.11. Способ измерения положения объекта заключается в том, что формируют оптический, сигнал, пространственно связанный с положением объекта, преобразуют его с помощью
13486442
линейно-матричного фотоприемника в дискретный видеосигнал с периодом
дискретизации Т,, восстанавливают
5
0
5
начальной установки счетчика 10.8 и блока 10.7 управления счетчиком и на синхронизирующий вход генератора 9. При этом первый 10.1 и второй 10.2 накапливающие сумматоры обнуляются, в счетчик 10.8 записыва ется единица, генератор 9 синхронизируется и вырабатывает импульсы, период которых меньше периода опроса фотоприемника. Эти импульсы поступают на тактовые входы блока 10.6 управления сумматором и блока 10.7 управления счетчиком. Блок 10.7 управления счетчиком разрешает прохождение импульсов, поступающих на его тактовый вход, на счетный вход счетчика 10.8.
Блок 5 управления фотоприемником периодически опрашивает фотоприемник
31348644
4, на выходе которого формируются вин
деосигналы, огибающая которых пропорциональна распределению освещенности в изображении диафрагмы 2.
Сигналы, снимаемые с фотоприемника 4, поступают на вход блока 6 выборки, осуществляющего синхронную выборку видеоимпульсов, снимаемых с фотоприемника. Частота выборки равна частоте опроса фотоприемника.
Сигналы с выхода блока 6 выборки поступают на вход блока 7 восстановления огибающей видеосигнала, с выхода которого видеосигнал поступает на вход аналого-цифрового преобразователя 8. С выходов аналого-цифрового преобразователя 8 коды, соответствующие мгновенным значениям уровня видеосигнала, поступают на информационные входы первого накапливающего сумматора 10.1 и дискриминатора 10.5. При превышении мгновенного значения видеосигнала некоторого порога на выходе
30
35
40
дискриминатора 10.5 формируется перед-25 поступает на вход делителя блока 10.3 НИИ фронт импульса. Величина порога срабатывания дискриминатора устанавливается, исходя из априорной информации об уровне помех в устройстве.
Импульс с выхода дискриминатора 10.5 поступает на управляющий вход блока 10.6 управления сумматором и вход формирователя 10.11. По переднему фронту этого импульса блок 10.6 управления сумматором разрешает прохождение импульсов, поступающих на его тактовый .вход с выхода генератора 9, на тактовый вход первого накапливающего сумматора 10.1 и на вход второго элемента 10.10 задержки, с выхода которого задержанные импульсы поступают на тактовый вход второго накапливающего сумматора 10.2. Элементы 10.9 и 10.10 задержки служат для компенсации временных сдвигов в узлах устройства.
На информационные входы первого накапливающего сумматора 10.1 подаются коды мгновенных значений уровня видеосигнала. В момент прихода импульса на тактовые входы накапливающие сумматоры прибавляют к ранее накопленным суммам коды, поступающие на их информационные входы, следовательно, после прихода п импульсов в первом и втором накапливающих сумматорах накопятся суммы, соответствен45
50
55
деления, а код суммы, накопленной вторым накапливающим сумматором 10.2, поступает на вход делимого блока 10.3 деления. При этом на выходе блока 10.3 деления формируется код част- ного.
По заднему фронту импульса, сформированного дискриминатором 10.5, формирователь 10.11 формирует нм- пульс, поступающий на вход первого элемента 10.9 задержки и управляющий вход блока 10.7 управления счетчиком, который запрещает прохождение импульсов, поступающих на его тактовый вход, на счетный вход счетчика 10.8. Код, соответствующий числу импульсов, подсчитанных счетчиком 10.8, поступает на входы уменьшаемого блока 10.4 вычитания, на входы вычита которого поступают коды с выхода блока 10.3 деления. Код результата вычитания поступает на информационные входы регистратора 11, который его регистрирует по переднему фронту импульса, поступающего на его вход записи с выхода первого элемента задержки.
За один цикл опроса фотоприемника 4 в регистраторе 11 будет зарегистрирован код результата, соответствующий координате энергетического центра огибающей к J
rilTU;
R N - ,
и;
но ) и, и) ) и- , где и. - код
1.1 J 11 1 -1
мгновенного значения уровня видеоимпульса в момент прихода на тактовый вход первого накапливающего сумматора i-ro импульса. Если после прихода k-ro импульса мгновенное значение уровня видеосигнала становится меньше порога срабатывания, дискриминатор 10.5 формирует на выходе задний фронт импульса, блок 10.6 управления сумматором запрещает прохождение импульсов, поступающих на его тактовый вход, на тактовые входы накапливающих сумматоров. В первом и втором накапливающих сумматорах будут накоплекны результаты, соответственно }7 U;
к ) ;
и ) ) U . Код суммы, накопленной
j ri ;и
первым накапливающим сумматором 10.1,
0
5
0
5 поступает на вход делителя блока 10.3
5
0
5
деления, а код суммы, накопленной вторым накапливающим сумматором 10.2, поступает на вход делимого блока 10.3 деления. При этом на выходе блока 10.3 деления формируется код част- ного.
По заднему фронту импульса, сформированного дискриминатором 10.5, формирователь 10.11 формирует нм- пульс, поступающий на вход первого элемента 10.9 задержки и управляющий вход блока 10.7 управления счетчиком, который запрещает прохождение импульсов, поступающих на его тактовый вход, на счетный вход счетчика 10.8. Код, соответствующий числу импульсов, подсчитанных счетчиком 10.8, поступает на входы уменьшаемого блока 10.4 вычитания, на входы вычита которого поступают коды с выхода блока 10.3 деления. Код результата вычитания поступает на информационные входы регистратора 11, который его регистрирует по переднему фронту импульса, поступающего на его вход записи с выхода первого элемента задержки.
За один цикл опроса фотоприемника 4 в регистраторе 11 будет зарегистрирован код результата, соответствующий координате энергетического центра огибающей к J
rilTU;
R N - ,
и;
513А8644
где R - код, зарегистрированный реги- видеосигнала, осуществляют дискрети- стратором;зацию огибающей с периодом дискретиN - количество импульсов, накоп- зации Т Т,, преобразуют дискрет- ленных счетчиком за цикл об- ные значения U; огибающей в двоичный работки.код, измеряют с дискретом Т временной интервал N, начало которого совФормула изобретения падает с началом опроса фотоприемника, а конец - с последним импульсом
Способ измерения положения объекта,io дискретного видеосигнала, а положение заключаюп ийся в том, что формируют объекта определяют по координате R пространственно связанный с положени- энергетического центра огибающей от- ем объекта оптический сигнал, преоб- носительно начала временного интерва- разуют его с помощью линейно-матрич- ла N, которую вычисляют по формуле кого фотоприемника в дискретный видео- 5) У U;
сигнал с периодом дискретизации Т, R N
отличающийся тем, что, с U;
целью увеличения точности измерения, где k - количество импульсов дискревосстанавливают огибающую дискретного .тизации огибающей.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для отображения информации на экране электронно-лучевой трубки | 1990 |
|
SU1737438A1 |
| Арифметико-логическое устройство для умножения чисел по модулю | 2017 |
|
RU2653263C1 |
| ЛАЗЕРНАЯ СИСТЕМА ТЕЛЕОРИЕНТАЦИИ | 2003 |
|
RU2267734C2 |
| Устройство для определения координаты локомотива | 1990 |
|
SU1832093A1 |
| УСТРОЙСТВО КОНТРОЛЯ ЭНЕРГИИ, ПЕРЕДАВАЕМОЙ ПО ВОЛОКОННО-ОПТИЧЕСКИМ ЛИНИЯМ СВЯЗИ (ВАРИАНТЫ) | 1999 |
|
RU2152133C1 |
| Устройство для контроля местоположения локомотива | 1990 |
|
SU1794765A1 |
| ИСТОЧНИК ПИТАНИЯ ЭЛЕКТРОМАГНИТНЫХ КОМПЕНСАТОРОВ | 2010 |
|
RU2414740C1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ ЦИФРОВОЙ ИНФОРМАЦИИ | 2007 |
|
RU2356165C1 |
| Устройство распознавания обзорной радиолокационной станции | 2024 |
|
RU2828475C1 |
| Устройство для измерения положения объекта | 1985 |
|
SU1303822A2 |
Изобретение относится к измерительной технике и может быть применено при измерении перемещений объектов. Целью изобретения является увеличение точности измерения за счет увеличения информативности способа путем восстановления огибающей дискретного видеосигнала, полученного с линейно-матричного фотоприемника, и вычисления координаты знергетического центра огибающей, дискретизированной с частотой большей частоты дискретизации первичного видеосигнала. Устройство, реализующее способ, содержит источник 1 света, диафрагму 2, блок 3 формирования изображения диафрагмы, линейно-матричный фотоприемник А, блок 5 управления фотоприемником, блок 6 выборки, блок 7 восстановления огибающей видеосигнала, аналого-цифровой преобразователь 8, генератор 9, блок 10 вычисления координаты, регистратор 11. Вычисление координаты осуществляется в блоке 10 в соответствии к .1 ч с формулой R N - ZI и ,- , J--1 1 1 ,м где и5 - дискретные значения огибающей видеосигнала , R - координата положения объекта, вьфаженная в количестве тактов обработки; N - длительность цикла обработки, выраженная в количестве тактов обработки; k - количество тактов обработки в огибающей. 1 ил. (Л о:) 4 00 Oi 4 4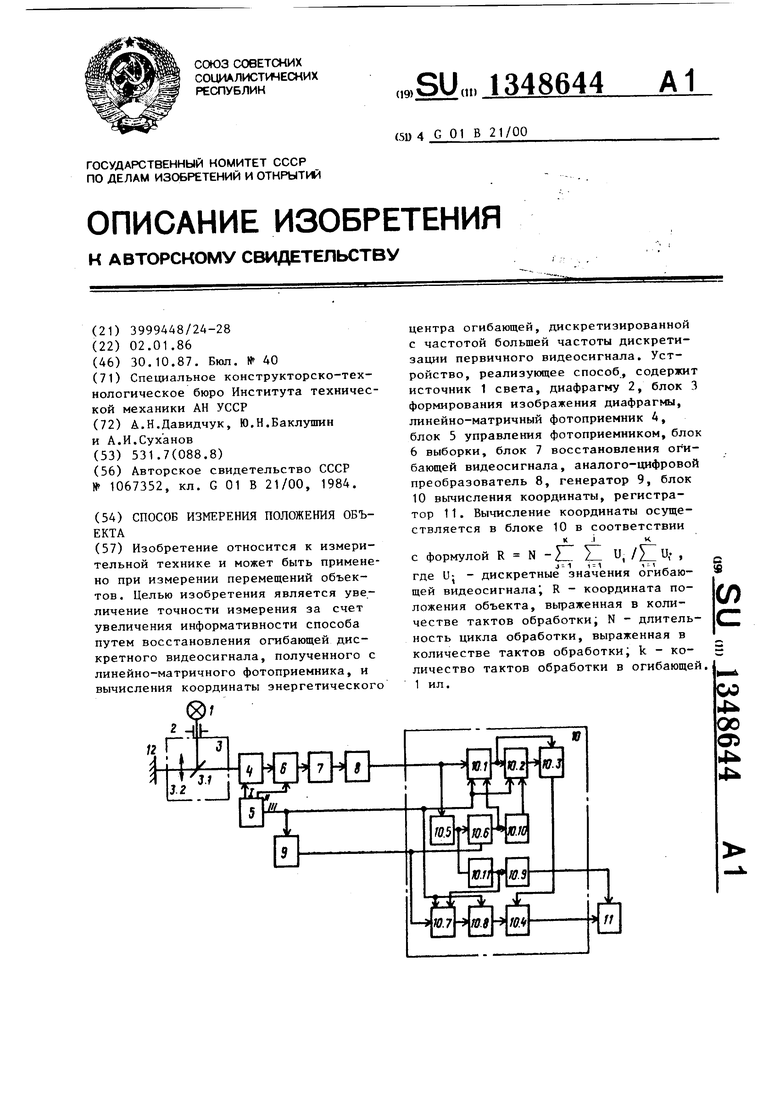
| Способ измерения положения объекта и устройство для его осуществления | 1982 |
|
SU1067352A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
