Изобретение относится к сейсмологии, а именно к регистрации сильных движений, и может быть использовано для определения поступательньк перемещений и поворотов грунтов или сооружений в ближней зоне землетрясений и взрьшдб.
Целью изобретения является расширение области использования способу за счет обеспечения регистрации поворотов.
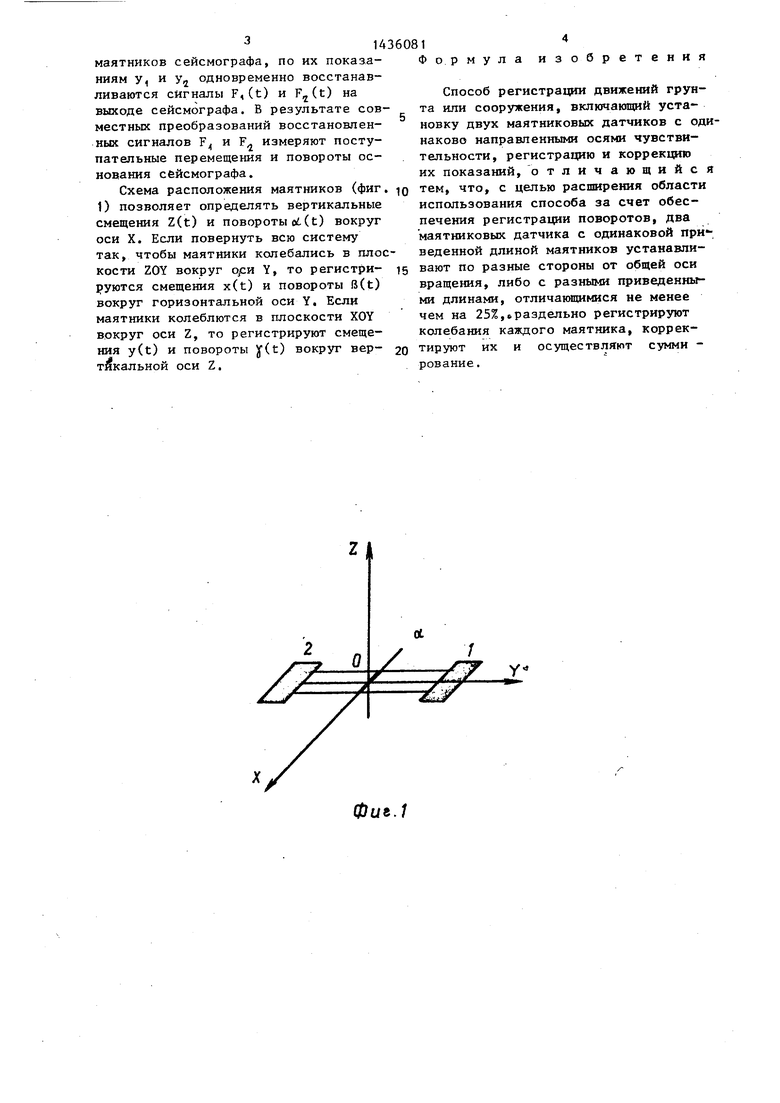
На фиг. 1 и 2 показаны схемы установки маятников.
. Маятниковые датчики 1 и 2, имею- |(цие одинаковые оси чувствительности перемещающиеся в параллельных плос остях, устанавливают на общем осно- ании по разные стороны (фиг. 1) либо с одной стороны (фиг. 2) от оси |вращения.
Уравнения движения маятников 1 и (фиг. 1 и 2) без учета поперечной чувствительности записьшаются следующим образом:
y;42w,D,y;4.a5jy, -V,(Z 4l,6i);
y , +2WtDiy; + -V,j(,ci ), (1)
где у, - амплитуда колебании маятников 1 и 2; у , соответственно первые и
вторые производные по времени}С0,„- угловые частоты их собст-
венных колебаний D,, затухания; 1 - приведенные длины маятни °«;
- увеличения.
Знак минус во втором уравнении системы соответствует схеме установки маятников на фиг. 1, а знак плюс схеме на фиг. 2.
Обозначая
Z(t)+l,oi(t) S F/t); Z(t) + lioi(t) Fj(t), t
тогда
F,(t)-(1/V)(y,+2co,D, y,dt+-tt0
-hco.jj y,);
00i
F,2(t)-(1/V4)((0,jD2 + H-CO /JJ y,d
5 0
5
0
з
0
.
0
5
Интегрирование экспериментальной Функции по времени tr приводит к накоплению систематических (длиннопе- риодных) погрешностей. Для их исключения применяют коррекцию нулевой линии .
В случае схемы на фиг, 1
Vot(t) (F,-F)/(l,-Hj);
VZ(t) (, )/(l,.-HJ, (3)
где et(t) - угол наклона;
Z(t) - перемещение грунта или
сооружения. В случае схемы на фиг. 2
s6(t) (F,-F4)/(l,-l2); Z(t) (F4l,-FJ.,)/(l,-l2). (4)
При этом 1 э 1 и желательно, чтобы приведенные длины 1 и 1 различались существенно. При близких к приведенных длинах следует использовать схему (фиг. 1).
На выходе маятников 1 и 2 регистрируются сигналы у и у (1). Затем по показаниям у, и у, используя восстанавливающий фильтр, описьшае- мый уравнением (2), определяют сигналы Z(t)+l,c6(t) и Z(t)- -r4o6(t) . Разли- .чия между этими двумя сигналами связаны с двумя факторами: разница приведенных длин 1 и 1 и помехи (погрешности измерений). Для надежного вьщеления сигналов Z(t) и ot(t) необходимо, чтобы различия между сигналами определялись разницей приведенных длин 1, и Ij. Ошибка восстановления сигналов прямо пропорциональна уровню помех в сигналах у, и у .
При уровне помех в каждом канале менее 0,5% уровень ошибки восстановления в одном канале достигает 5%. Суммарная ошибка о двух каналов 0,о не превосходит S S. Таким образом, при использова:нии двух акселерометров со сравнительно низким динамическим диапазоном суммарная ошибка составляет после применения восстанавливающих фильтров менее 10%, Тогда при 25% различиях в приведенных длинах 1 и 1 сигналы Z(t) и c(,(t) могут быть разделены.
Способ предполагает следующую последовательность операций; одновременно регистрируются показания- двух
маятников сейсмографа, по их показаниям у, и у одновременно восстанавливаются сигналы F,(t) и F(t) на выходе сейсмографа. В результате сов- местньЕК преобразований восстановленных сигналов F и F измеряют поступательные перемещения и повороты основания сейсмографа.
Схема расположения маятников (фиг. 1) позволяет определять вертикальные смещения Z(t) и повороты ot(t) вокруг оси X. Если повернуть всю систему так, чтобы маятйики колебались в плоскости ZOY вокруг ори Y, то регистри- руются смещения x(t) и повороты B(t) вокруг горизонтальной оси Y. Если маятники колеблются в плоскости XOY вокруг оси Z, то регистрируют смещения y(t) и повороты yCt) вокруг вер- т1 кальной оси Z.
Формула
4
3 о
р е т е и и я
Способ регистрации движений грунта или сооружения, включающий установку двух маятниковых датчиков с одинаково направленными осями чувствительности, регистрацию и коррекщпо их показаний, отличающийся тем, что, с целью расширения области использования способа за счет обеспечения регистрации поворотов, два маятниковых датчика с одинаковой приведенной длиной маятников устанавливают по разные стороны от общей оси вращения, либо с разными приведенными длинами, отличающимися не менее чем на 25%,«раздельно регистрируют колебания каждого маятника, корректируют их и осуществляют сумми - рование.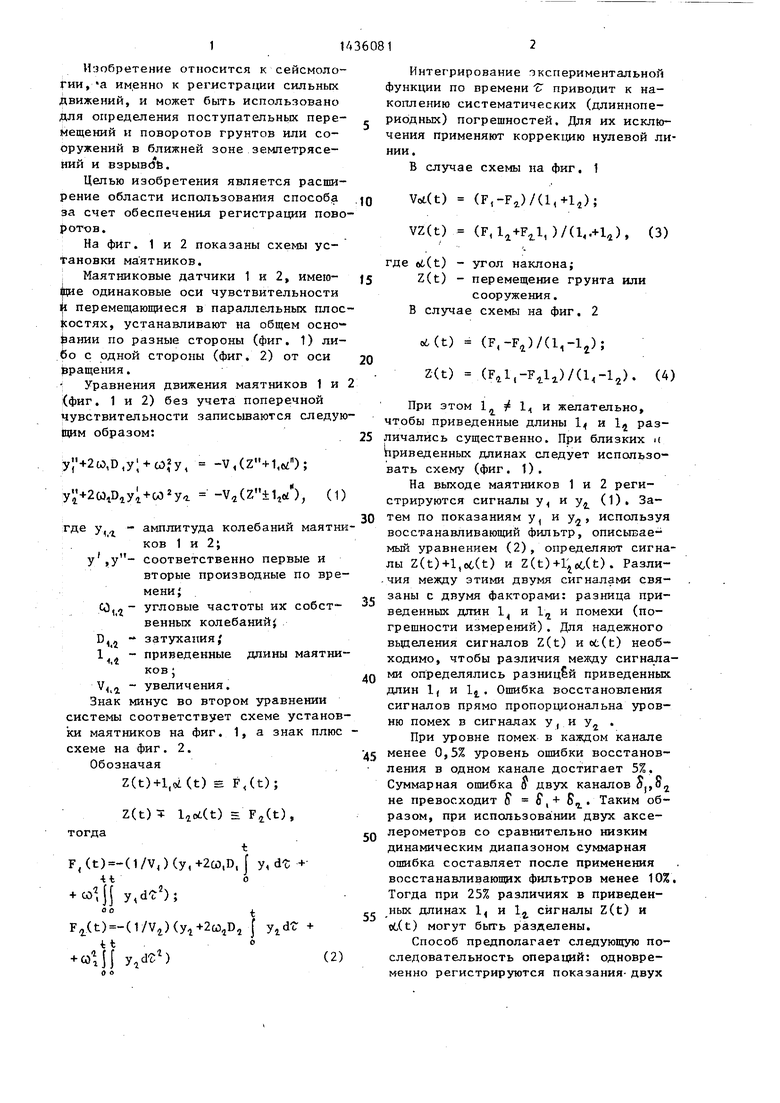
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ регистрации вертикального движения, наклона и поворота грунта или сооружения | 1988 |
|
SU1562874A1 |
| Способ регистрации поступательного движения и наклона грунта | 1988 |
|
SU1562875A1 |
| СПОСОБ ОПЕРАТИВНОГО ПРОГНОЗА ЗЕМЛЕТРЯСЕНИЙ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2012 |
|
RU2507546C1 |
| СЕЙСМОГРАФ С ЛАЗЕРНОЙ РЕГИСТРАЦИЕЙ | 2021 |
|
RU2786338C1 |
| СЕЙСМОГРАФ | 1991 |
|
RU2030767C1 |
| СПОСОБ ГЕОХИМИЧЕСКОЙ РАЗВЕДКИ | 2010 |
|
RU2456644C2 |
| ГРАДИЕНТОМЕТРИЧЕСКИЙ СЕЙСМОПРИЕМНИК | 2010 |
|
RU2439623C1 |
| Сейсмограф | 1979 |
|
SU789961A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРЕДВЕСТНИКА ЦУНАМИ | 2011 |
|
RU2455664C1 |
| Сейсмометр | 1984 |
|
SU1267319A1 |
Изобретение относится к сейсмологии, а именно к регистрации сильных движений, и может быть использовано для определения поступательных перемещений и поворотов грунтов или сооружений. Цель - расширение области использования способа путем обеспечения регистрации поворотов. Способ; предполагает одновременную регистрацию показаний двух маятников сейсмографа, одновременное восстановление сигналов на входе сейсмографа, преобразование восстановленных сигналов и измерение поступательных перемещений и поворотов основания сейсмографа. В сейсмографе устанавливают дополнительный маятник, колеблющийся в той же плоскости и имеющий ту же ось чувствительности, что и основной маятник, одновременно регистрируют показания двух маятников сейсмографа, g затем восстанавливают сигналы на входе сейсмографа, совместно преобразуют восстановленные сигналы первого и вто рого маятников и раздельно измеряют поступательные смещения и повороты грунта. 2 ил. (Л
Фив./
Фие. 2
| Харлы Д.А | |||
| и др | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| В кн.: Сейсмические приборы, вып | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| - М.: Наука, 1969, с | |||
| Способ запрессовки не выдержавших гидравлической пробы отливок | 1923 |
|
SU51A1 |
| Грайзер В.М | |||
| Истинное движение почвы в эпицентральной зоне | |||
| - М.: ИФЗ АН СССР, 1984, с | |||
| Прибор с двумя призмами | 1917 |
|
SU27A1 |
