СА9 О
ю
ел
ал
Изобретение относится к электротехнике и может быть использовано в электроприводах постоянного тока,
Цель изобретения - повьппение качества управления электроприводом
На чертеже приведена схема устройства, реализующего способ управления нереверсивным электроприводом постоянного тока.
Устройство, реализующее способ управления нереверсивным вентильным электроприводом, содержит электродвигатель 1, систему 2 импульсно- фазового управления, преобразова-. тель .3.
Устройство также содержит узел 4 сравнения, систему 5 регулирования частоты вращения, выход которой соединен с первым входом системы 2 им- пульсно-фазового управления, порого- Bbrii элемент 6, выход которого подключен к второму входу системы 2 импульсно-фазового управления, а вход соединен с выходом узла 4 сравнения и вх одами системы 5 регулирования частоты вращения, блоЙ 7 задания и датчик 8 частоты вращения электродвигателя 1, входы которых подключены к первому и второму входам узла 4 сравнения.
Устройство, реализующее способ, работает следующим образом.
Сигнал, поступающий с выхода за- датчика 7 частоты вращения, сравнивается в узле сравнения с сигналом фактического значения частоты вращения, поступающим с выхода датчика 8 частоты вращения, и их разность поступает на входы системы 5 регулирования и порогового элемента 6, выходы которых имеют противоположную полярность: увеличение выходного сигнала системы 5 регулирования смещает выходные импульсы системы 2 импульсно-фазового управления в сторону открыван.ия нереверсивного вентильного преобразователя 3, а выходной сигнал порогового элемента 6 смещает выходные импульсы системы 2 в положение, соответствукяцее максимальному углу управления преобразователем 3. При этом происходит ИН
вертирование энергии, запасенной в индуктивностях главной цепи электродвигателя 1. С помощью сигнала датчика 8 частоты вращения, поступающего на третий вход системы 2 импульсного фазового управления, ком0
5
0
5
0
5
0
5
0
5
пенсируется отрицательная обратная связь до ЭДС электродвигателя 1.
Полярности СИГН.ЗЛОВ с выходов датчика 8 частоты вращения и системы 5 регулирования совпадают.
При приложении к валу электродвигателя 1, вращаклцегося с заданной частотой, момента нагрузки выход блока системы 5 регулирования возрастает на величину, необходимую для получения приращения напряжения на выходе преобразователя 3 для компенсации падения напрязкения в якорной цепи электродвигателя 1 от тока нагрузки.
Разность выходньк сигналов задат- чика 7 частоты вращения и датчика 8 частоты вращения не меняет свою полярность. За время переходного процесса, определяемого приложением момента нагрузки к 1залу электродвигателя 1, пороговый элемент находится в закрытом состоянии, xapaктepизv- емом нулевым значением сигнала на его выходе.
При сбросе момента нагрузки ток в якорной цепи электродвигателя 1 начинает спадать-. Скорость спадания тока определяется быстродействием системы регулирования и составляет величину порядка нескольких десятков миллисекунд. Под действием спадающего тока, поскольку момент нагрузки на валу электродвигателя t отсутствует, происходит подразгон электродвигателя 1 - модуль величины превышения частоты вращения электродвигателя 1 по отношению к заданному значению для системы без запаздывания тока при приложении момента нагрузки практически совпадает с максимальным падением частоты вращения электродвигателя 1., имевшим место при приложении момента нагрузки.
Отклонение частоты вращения при приложении и сбросе номинального момента для электродвигателей средней мощности, например, может достигать несколько процентов номинальной частоты вращения электродвигателя.
В начале подра;(гона, при превышении частотой вращения заданного значения на несколько десятых долей процента, пороговый элемент 6 срабатывает, под действием сигнала на его выходе устанавливается максимальный угол открывания вертикального преобразователя 3, анергия, иакопленная в индуктивности силоной цепи электродвигателя, инвертируется в питающую сеть, разгон электродвигателя прекращается. Начинается под- тормаживание электродвигателя на выбеге.
При достижении частотой вращения электродвигателя 1 заданного значения сигнал с выхода порогового элемента 6 снимается и электрод переходит в режим холостого хода. Если на выходе блока системы 5 регулирования сигнал оказывается больше величины соответствующей холостому ходу электропривода при заданной частоте вращения, то цикл подразгона может повториться. Однако при реальных соотно- гаениях параметров современных электроприводов, использующих в качестве датчика 8 частоты вращения тахогене- раторы с низкочастотной пульсацией 0,1%, время выбега оказьтается существенно больше времени возвращения системы в исходное состояние.
Таким образом, при использовании предлагаемого способа появляется возможность существенно повысить эффективность управления, уменьшив пере- регулирование частоты при сбросе момента нагрузки. При этом уменьшаются динамические удары при последукнцем приложении момента к валу электродвигателя, повьшается ресурс работы оборудования.
11ри использовании предлагаемого
способа повышается качество работы прокатных клетей за счет улучшения режима захвата металла, а также производительность за счет возможности прокатки с минимальными паузами между заготовками.
Формула изобретения
15
Способ управления нереверсивным вентильным электроприводом постоянного тока, согласно которому сравнивают задание на частоту вращения
электродвигателя с измеренным значением частоты вра1цения и по результатам сравнения с помощью системы импульс- но-фазового управления устанавливают соответствующий угол включения вентилей преобразователя, отличающийся тем, что, с целью повышения качества управления, задают пороговое значение превышения частотой вращения заданного уровня, при
достижении которого устанавливают максимальный угол включения вентилей преобразователя.

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления нереверсивным вентильным электроприводом постоянного тока | 1988 |
|
SU1663729A2 |
| Нереверсивный вентильный электропривод постоянного тока | 1981 |
|
SU1070679A1 |
| Устройство управления нереверсивным вентильным электроприводом валков прокатного стана | 1980 |
|
SU921649A1 |
| Устройство управления нереверсивным вентильным электроприводом валков прокатного стана | 1981 |
|
SU997876A1 |
| Нереверсивный вентильный электропривод постоянного тока | 1984 |
|
SU1182620A1 |
| Электропривод постоянного тока | 1988 |
|
SU1686680A1 |
| Устройство для управления реверсив-НыМ ВЕНТильНыМ элЕКТРОпРиВОдОМ | 1979 |
|
SU817954A1 |
| Электропривод подъемной машины | 1985 |
|
SU1339852A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ НЕРЕВЕРСИВНЫМ ВЕНТИЛЬНЫМ ЭЛЕКТРОПРИВОДОМ ПОСТОЯННОГО ТОКА | 1973 |
|
SU399988A1 |
| Нереверсивный вентильный электропривод постоянного тока | 1986 |
|
SU1457134A1 |
Изобретение относится к электротехнике и может быть использовано для управления электродвигателями постоянного тока. Целью иэобретения является повьшение качества управления электроприводом. Согласно данному способу напряжение, поступающее с выхода задатчика 7 частоты вращения, сравнивается в узле 4 сравнения с сигналом фактического значения частоты вращения, поступающим с выхода датчика 8 частоты вращения. Их разность поступает на входы системы 5 регулирования и порогового элемен- на 6. При повышении частотой вращения заданного значения пороговый элемент 6 срабатывает и под действием сигнала на его выходе устанавливается максимальный угол открывания вентильного преобразователя 3. В электроприводе уменьшается перерегулирование частоты вращения при сбросе момента нагрузки. 1 ил. & (Л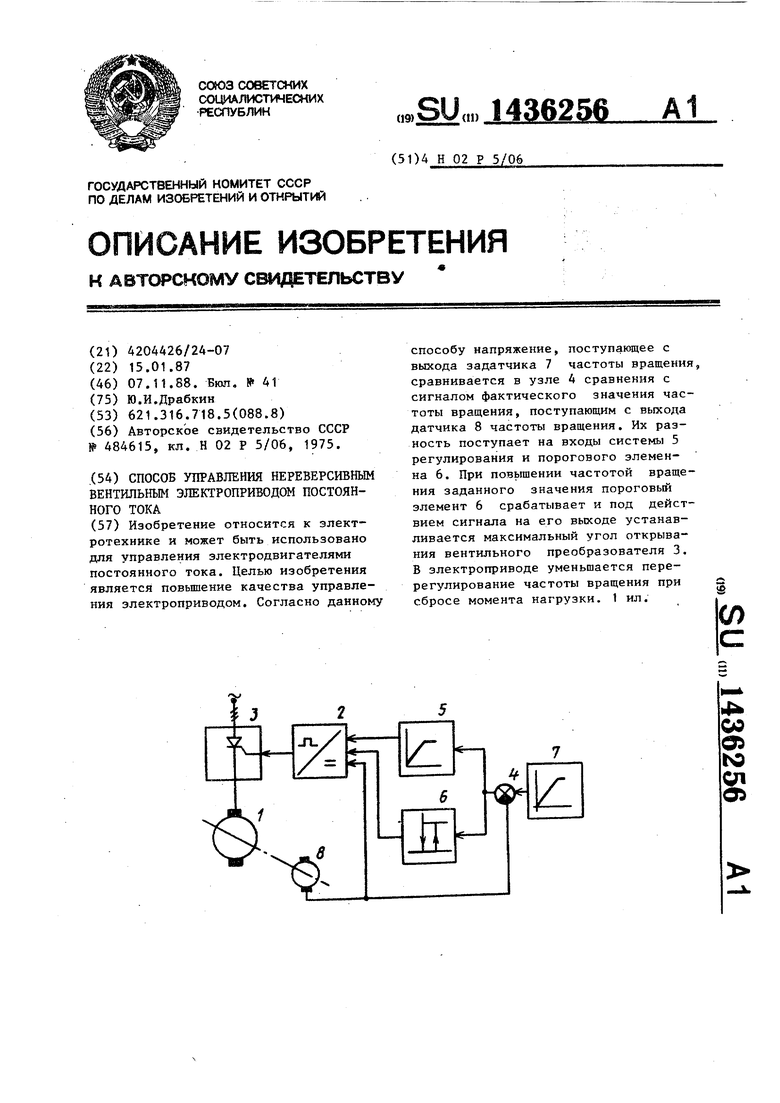
| Способ управления вентильным электроприводом | 1972 |
|
SU484615A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Видоизменение прибора для получения стереоскопических впечатлений от двух изображений различного масштаба | 1919 |
|
SU54A1 |
