О CS
со
VI
ю ю
ю
Изобретение относится к электротехнике и может быть использовано в электроприводах прокатных станов.
Цель изобретения - повышение качества управления.
На чертеже приведена схема электропривода.
Электропривод содержит электродвигатель 1 постоянного тока, последовательно соединенный вентильный преобразователь 2, регулятор 3 с тока с узлом 4 шунтирования, регулятор 5 частоты вращения с узлом 6 шунтирования, пропорциональный усилитель. 7, блок 8 задания частоты вращения, а также датчик 9 тока, датчик 10 частоты вращения и датчик 11 ЭДС двигателя, подключаемые к вторым входам соответственно регулятора 3 тока, пропорционального усилителя 7 и вентильного преобразователя 2. Устройство содержит также пороговый элемент 12, вход которого подсоединен к выходу пропорционального усилителя 7, а выход - к входам узлов 4 и 6 шунтирования и к третьему входу вентильного преобразователя 2, на четвертый вход которого подается сигнал смещения.
Вместо датчика 11 ЭДС может быть использован датчик 10 частоты вращения, напряжение которого пропорционально ЭДС эл е ктрод вигате л я.
Регуляторы 3 и 5 тока и частоты вращения могут быть выполнены на базе операци- онного усилителя с последовательно соединенными резистором и конденсатором в цепи обратной связи, а узлы 4 и б шунтирования могут быть осуществлены герконовым реле, контакты которого шунтируют цепь обратной связи регулятора или, что эффективнее, только конденсатор этой цепи.
Электропривод постоянного тока работает следующим образом.
В установившемся режиме при отсутствии момента нагрузки на валу электродвигателя 1 его частота колеблется, незначительно отклоняясь от заданного значения в сторону увеличения.
При равенстве частоты вращения электродвигателя 1 заданному значению динамический ток определяется тем, что выход датчика 11 ЭДС электродвигателя компенсирует противоЭДС электродвигателя, характеристика вентильного преобразователя 2 смещена в сторону открывания. При этом величина динамического тока выбирается близкой к граничному непрерывному значению. Под действием указанного тока электродвигатель 1 разгоняется до тех пор, пока сигнал на выходе пропорционального усилителя 7 не окажется равным величине уставки срабатывания порогового элемента 12. После срабатывания последнего цепи обратных связей операционных усилителей регуляторов 3 и 5
тока и частоты вращения шунтируются, их выход принимает нулевое значение, вентильный преобразователь 2 закрывается, импульсы управления его при этом устанавливаются в положение максимального за0 крытия преобразователя. Происходит рекуперация энергии запасенной индуктив- ностями цепи якоря при протекании тока нагрузки, и начинается торможение электродвигателя 1 под действием момента холо5 стого хода.
При снижении частоты вращения электродвигателя 1 до заданной блоком 8 задания частоты вращения величины сигнал на выходе пропорционального усилителя 7
0 принимает нулевое значение, выход порогового элемента 12 становится равным нулю, регуляторы 3 и 5 тока и частоты вращения расшунтируются, блокирующий сигнал с третьего входа вентильного преобразовате5 ля 2 снимается и- начинается подразгон электродвигателя 1.
Таким образом, согласно способу управления в электроприводе частота вращения электродвигателя при отсутствии
0 момента нагрузки на валу электродвигателя 1 колеблется над уровнем заданного значения. Амплитуда отклонений частоты вращения определяется коэффициентом усиления пропорционального усилителя 7, уставками
5 срабатывания и возврата порогового элемента 12 и выбирается на порядок меньше динамического снижения частоты вращения электродвигателя 1 при набросе нагрузки. Кроме того, недостатки формы тока яко0 ря при набросе нагрузки, характерные для электроприводов, снабженных двухкратно- интегрирующей системой электропривода, отсутствуют.
Действительно, после отключения по5 рогового элемента 12 в цепи якоря электродвигателя 1 появляется заданный по амплитуде динамический ток с большой крутизной переднего фронта. Однако поскольку амплитуда этого тока составляет лишь
0 часть номинального значения, коммутация на коллекторе электродвигателя оказывается ненарушенной.
При приложении нагрузки к валу электродвигателя 1 возникает статическая составля5 ющая тока якоря, которая складывается с динамической. При этом динамическая просадка частоты вращения электродвигателя 1 уменьшается, сокращается время восстановления заданного значения частоты вращения. Управление по предлагаемому способу
обеспечивает снижение отклонения частоты вращения электродвигателя 1 от заданного значения.
После сброса нагрузки частота вращения электродвигателя 1 начинает увеличиваться. Сигнал на выходе пропорционального усилителя 7 меняет полярность и возрастает до величины срабатывания порогового элемента 12, выходной сигнал которого закрывает регуля- торы 3 и 5 тока и частоты вращения путем шунтирования цепи их обратной связи и смещает угол управления вентильного преобразователя 2 до максимального значения. Ток якоря становится равным нулю, разгон электродвигателя прекращается и начинается его торможение до заданной частоты вращения под действием момента холостого хода. При достижении электродвигателем заданной частоты вращения пороговый элемент 12 отключается и электродвигатель начинает работать в описанном режиме, характеризуемом отсутствием момента нагрузки на валу электродвигателя.
Таким образом, эффективность элект- ропривода, реализующего предлагаемый способ, достигается за счет повышения чувствительности и стабильности работы порогового элемента, обеспечиваемых введением пропорционального усилителя, снижением в Кп раз влияния на работу порогового элемента дрейфа характеристики регулятора частоты вращения.
Воздействием порогового элемента на узлы шунтирования регуляторов тока и частоты вращения обеспечивается сокращение времени их возвращения в исходное состояние, соответствующее нулевым начальным условиям Применительно к работе электропривода прокатных валков это означает независимость переходных процессов при заводе металла в валки от длительности паузы между пропусками металла.
При управлении нереверсивным вентильным электроприводом постоянного тока при приложении момента к валу электродвигателя обеспечивается улучшение формы тока электродвигателя путем повышения скорости нарастания при малых значениях и снижения максимальной величины; уменьшение динамической просадки частоты вращения, а также сокращение времени восстановления заданного значения частоты вращения.
Формула изобретения Способ управления нереверсивным вентильным электроприводом постоянного тока по авт. ев №1436256, отличаю- щ и и с я тем, что, с целью повышения качества управления, в переходных режимах задают начальный ток электродвигателя, под действием, которого в режиме холостого хода осуществляют разгон электродвигателя до установленного превышения заданного значения частоты вращения.

| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод постоянного тока | 1988 |
|
SU1686680A1 |
| Способ управления нереверсивным вентильным электроприводом постоянного тока | 1987 |
|
SU1436256A1 |
| Нереверсивный вентильный электропривод постоянного тока | 1981 |
|
SU1070679A1 |
| Электропривод для подъемной машины | 1983 |
|
SU1159138A1 |
| Устройство управления нереверсивным вентильным электроприводом валков прокатного стана | 1980 |
|
SU921649A1 |
| НЕРЕВЕРСИВНЫЙ ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1989 |
|
RU2020714C1 |
| Электропривод постоянного тока | 1977 |
|
SU692044A1 |
| Способ двухзонного регулирования частоты вращения электропривода | 1988 |
|
SU1656651A1 |
| Электропривод постоянного тока | 1985 |
|
SU1336184A1 |
| Электропривод подъемной машины | 1985 |
|
SU1339852A1 |
Изобретение относится к электротехнике и может быть использовано в электроприводах прокатных станов. Целью изобретения является повышение качества управления. Электропривод содержит электродвигатель 1 постоянного тока, подключенный к нереверсивному вентильному преобразователю 2. Регуляторы 3 и 5 тока и частоты вращения с узлами 4 и 6 шунтирования. Пороговый элемент выходом соединен с третьим входом преобразователя 2, на четвертый вход которого подается сигнал смещения. В данном способе управления в переходных режимах задают начальный ток электродвигателя, под действием которого в режиме холостого хода осуществляют разгон электродвигателя 1 до установленного превышения заданного значения частоты вращения и тем самым уменьшают динамическую просадку и время восстановления частоты вращения. 1 ил.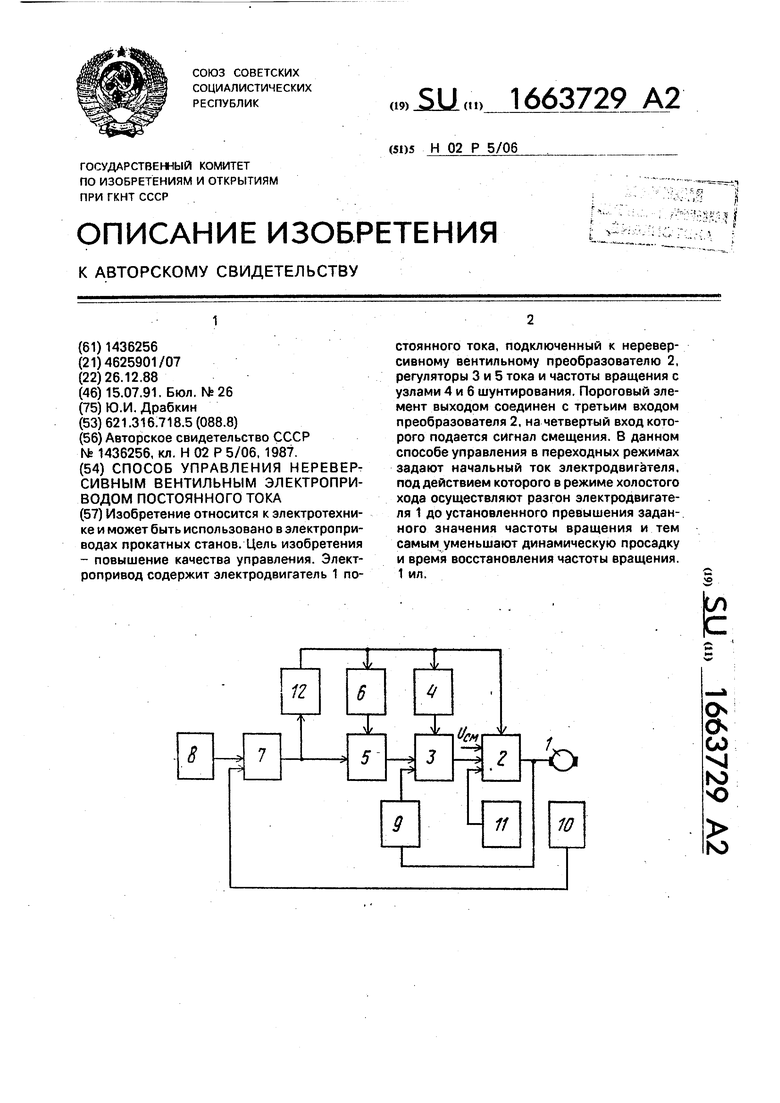
| Способ управления нереверсивным вентильным электроприводом постоянного тока | 1987 |
|
SU1436256A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
