Изобретение относится к контрольно-измерительной технике и может быть использовано, например, в автоматизированных комплексах листовой штамповки для контроля сдвоенности заготовок
Цель HaodpeTehTiH - увеличение производительности контроля различных деталей путем обеспечения возможности оперативной настройки системы в режиме обучеш-тя
На чертеже представлена блок-схема системы контроля сдвоенности деталей.
Система содержит импул-ьсный датчик положенияJ датчик 2 размера, элементы И 3 и 4 запоминающее уст- ройство 5, шину 6 сброса, реверсив- ный счетчик 7 .J триггер S шину 9 записи, шину И) управления;, ши1-гу 11 режима обучения и шину 12 автоматического режима
Выход импульсного датчика 1 положения подключен к первым входам элементов И 3 и 4, выходы которых подключены к суммирующему и вычитающему входам реверсивно го счетчика 7, Система контроля сдвоенности ра- ботает следующим образом.
ПредположимJ что оператором устаовлен режим обучения, В соответстии с программой работы робота манипулятор ощгскается к эагрузочно-ориен--55 тирующему устройству,, осуществляет захват одной детали и подъем ее мимо датчика 2 размера, В момент входа детали в soi-iy действия да.тчика 2 размера на его выходе появляется уро- 40 вень 1 и к суммирующему входу реверсивного счетчика 7 через элемент И 3 подключается импульсный датчик 1 положеш-Ша В счетчик 7 поступают импульсы с вькода импульсного датчика 1 положения, В момент выхода детали из действия датчика 2 размера на его выходе появляется уровень 0 откличаюарй импульсный датчик 1 положения от суммирующего входа реверсивного счетчика 7, в котором накопились импульсы, количество Которых пропорционально размеру одной детали. Полученное значение из реверсивного счетчика 7 перегшсывается в ячейку запоминающего устройства 5, Аналогично происходит обучение робота с другим типоразмером деталей, Форг-шровайие .эталонных значений разд5
50
55
0
5
0
5 0
меров деталей может осуществляться аналитически.
В автоматическом режиме на третьих входах элементов И 3 и 4 устанавливаются уровни О и 1 соответственно, а в реверсивный счетчик 7 из запоминающего устройства 5 переписывается значение эталонного размера одной детали, которая обрабатывается в настоящее время. В соответствии с программой работы м анипулятор- захватьгоает и перемещает деталь мимо датчика 2 размера, В момент входа детали в зону ,действия датчика 2 размера на его выходе появляется информационный сигнал, подключаюнщй датчик 2 размера через элемент И 4 к вычитающему входу реверсивного счетчика 7. В результате импульсы с выхода датчика 1 положения, поступающие в счетчик, уменьшают записанный код. В момент выхода детали из зоны действия датчика 2 размера на его выходе формируется уровень, отключающий импульсный датчик 1 положения от счетчика 7. Если за время действия информационного сигнала датчика 2 размера от импульсного датчика 1 положения на вычитающий вход реверсивного счетчика 7 поступило количество импульсов, большее записанного кода, то на выходе заема реверсивного счетчика 7 формируется импульс, который устанавливает триггер 8, Это означает что в схвате робота две детали и более. Если за время действия информационного сигнала датчика 2 размера
от импульсного датчика 1 положения
о
поступило количество импульсов, меньшее или равное записанному коду, то на выходе заема реверсивного счетчика 7 имщ -льс заема не формируется и триггер 8 находится в нулевом состоя- 5 НИИ5 это означает, что в схвате ро бота одна деталь и он может продолжать работу по заданной программе.
5
0
Формула изобретения
Система контроля сдвоенности деталей, содержап1ая датчик размера, выход которого подключен к первому входу первого элемента И отлича- ю щ а я с я тем, что, с целью увеличения производительности контроля различных деталей, в нее введены импульсный датчик положения,-второй элемент И, запоминающее устройство.
реверсивный счетчик, триггер, шина режима обучения, шина автоматического режима, шина записи, шина управления предустановкой, шина сброса, выход датчика размера подключен к первому входу второго элемента И, выхоД которого подключен к вычитающему входу реверсивного счетчика, выходы которого подключены к входам данных запоминающего устройства, выходы которого подключены к входам предустановки реверсивного счетчика, выход заема которого подключен к информационному входу триггера, выход
импульсного датчика положения подключен к вторым входам элементов И, выход первого элемента И подключен к суммирующему входу реверсивного счетчика, шины режима обучения и автоматического режима подключены к третьим входам соответственно первого и второго элементов И, шина записи подключена к входу записи запоминающего устройства, шина управле шя предустановкой подключена к входу управления предустановкой реверсивного счетчика, шина сброса - к входам сброса реверсивного счетчика и триггера.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения неэлектрических величин | 1986 |
|
SU1364852A1 |
| Селектор импульсной последовательности заданной длительности, содержащей заданное количество импульсов заданной длительности | 1989 |
|
SU1734201A1 |
| Устройство управляемой задержки импульсов | 1990 |
|
SU1742983A1 |
| Устройство для разгона и торможения электропривода | 1986 |
|
SU1374182A1 |
| Цифровая система управления | 1986 |
|
SU1357917A1 |
| Система управления многопозиционной индукционной нагревательной установкой | 1983 |
|
SU1121789A1 |
| Измеритель средней частоты импульсов | 1987 |
|
SU1487661A1 |
| Устройство для обнаружения боксования и юза колес транспортного средства | 1982 |
|
SU1073139A1 |
| Устройство измерения уровней импульсов сложной формы | 1989 |
|
SU1781626A1 |
| Цифровой регулятор | 1988 |
|
SU1508191A1 |
Изобретение относится к контрольно-измерительной технике и может быть использовано, например, в автоматизированных комплексах листовой штамповки. Для увеличения производительности контроля различных деталей в систему введены импульсный датчик лпплл. / // /- I положения, датчик 2 размера, элементы И 3,4, запоминающее устройство 5, шина 6 сброса, реверсивньй счетчик 7, триггер 8, шина 9 записи, шина 10 управления, шина 11 режима обучения, шина 12 автоматического режима. В запоминающем устройстве 5 хранят зталонные значения боковых размеров деталей, полученные в режиме обучения или аналитически. Реверсивный счетчик 7 регистрирует величину перемещения рабочего органа робота за время прохождения детали в зоне действия датчика 2 размера в режимах обучения и автоматическом. По результату сравнения величины перемещения рабочего органа робота с одной деталью с измеренной в процессе автоматической работы комплекса осуществляют контроль количества деталей в схва- те робота. 1 ил. с СЛ Cf С2 А2 л - г f ::: со о ою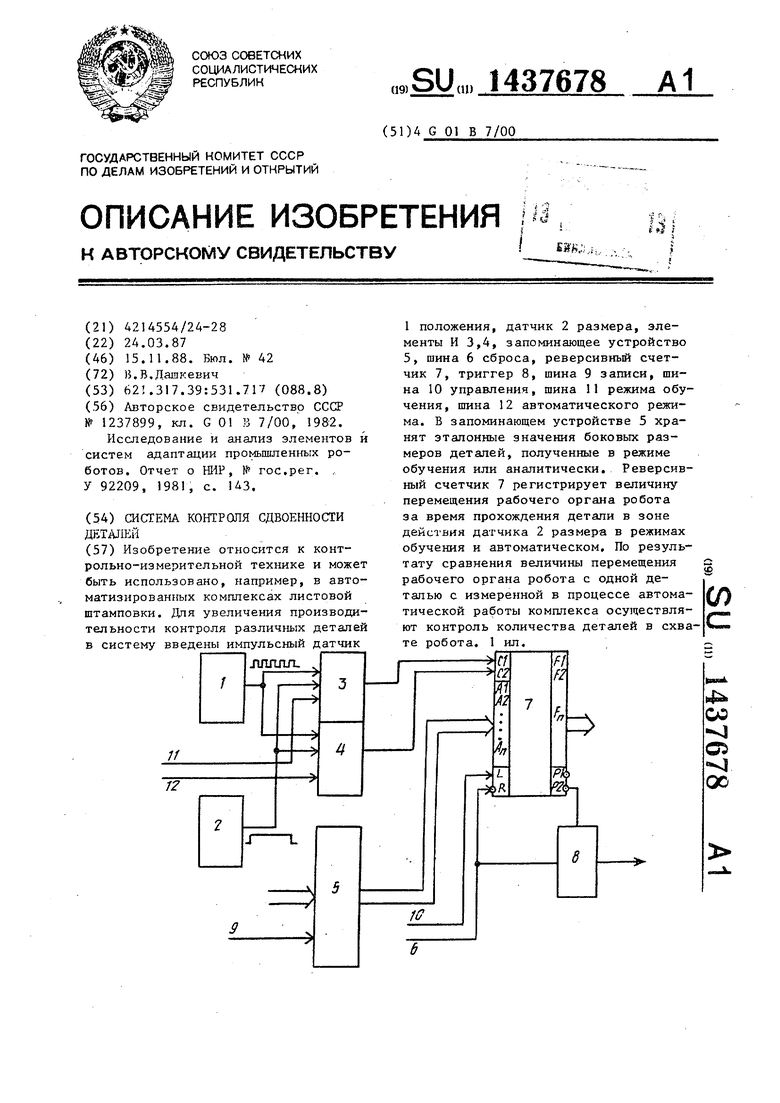
| Устройство для измерения перемещений | 1982 |
|
SU1237899A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Исследование и анализ элементов и систем адаптации промышленных роботов | |||
| Отчет о НИР, № гос.per | |||
| , У 92209, 1981, с | |||
| Крутильная машина для веревок и проч. | 1922 |
|
SU143A1 |
