113
Изобретение относится к цифровым системам управления и может быть использовано в системах управления промгзшшенньп-ш роботами, станками и другими механизмами.
Целью изобретения является повышение точности и надежности системы.
На фиг, I приведена функдиональ лая схема цифровой системы управле- ния; на фиг, 2 - функциональная схе ма блока ком1 5утации ключей; .на фиг, 3 - первьй регулирующий блок, на фиг. 4 - второй регулирующий блок на фиг. 5 функциональная схема первого интегратора; на фиг, б - функциональная схема преобразователя частота - код; на фиг, 7 - временные диаграммы, поясняюгцие принцип кзме- рйння скорости; на фиг, 8 - функцио- нальная схема датчика приращения позиции; на фиг, 9 - функциональная схема первого дещифратора; на фиг, 10- функциональная схема сдвигающего блока; на фиг, 1 1 - функциональная схема формирователя импульсов; на фиг, 2 - функциональная схема бло- ica синхронизации; на фиг, 13 - функциональная схема блока контроля тока на фиг. 14 - функциональная схема преобразователя код - ширина импуль- сов; на фиг, 15 - функциональная схе ма блока защиты ключей; на фиг, 16 време пше диаграммы, поясняющие прян Ц1-Ш формирования сигналов управления усилителем мощности; на фиг, 17 - функциональная схема усилителя мощно 4ти,
Цифровая система управления (фиг. 1) содержит задатчик 1, первый 2 и второй 3 регулирующие блоки, блок 4 коммутации ключей, усилитель 5 мощности, исполнительньй двигател 6, инкрементальный датчик 7, формирователь 8 импульсов, блок 9 синхро- низации, преобразователь 10 частота - код блок 11 памяти, сдвигаюнщй блок 12, датчик 13 приращения позиции, деишфратор 14,
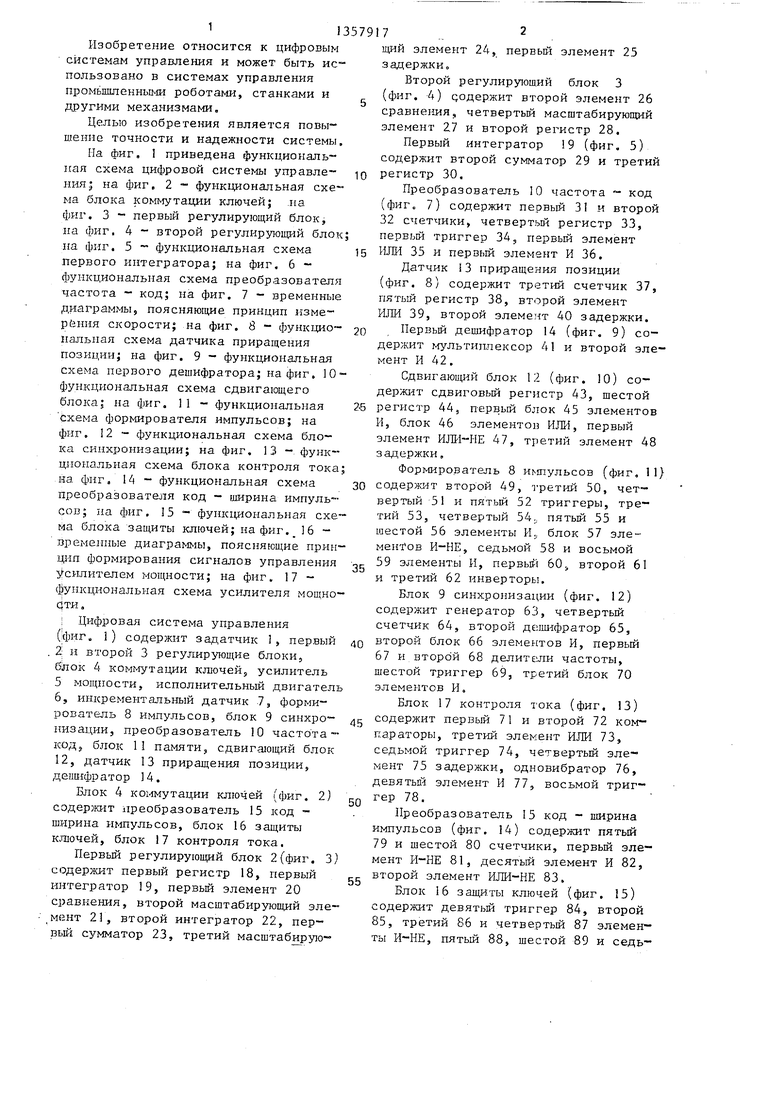
Блок 4 ко1-1мутации ключей (фиг, 2) содержит преобразователь 15 код - ширина импульсов, блок 16 защиты ключей, блок 17 контроля тока.
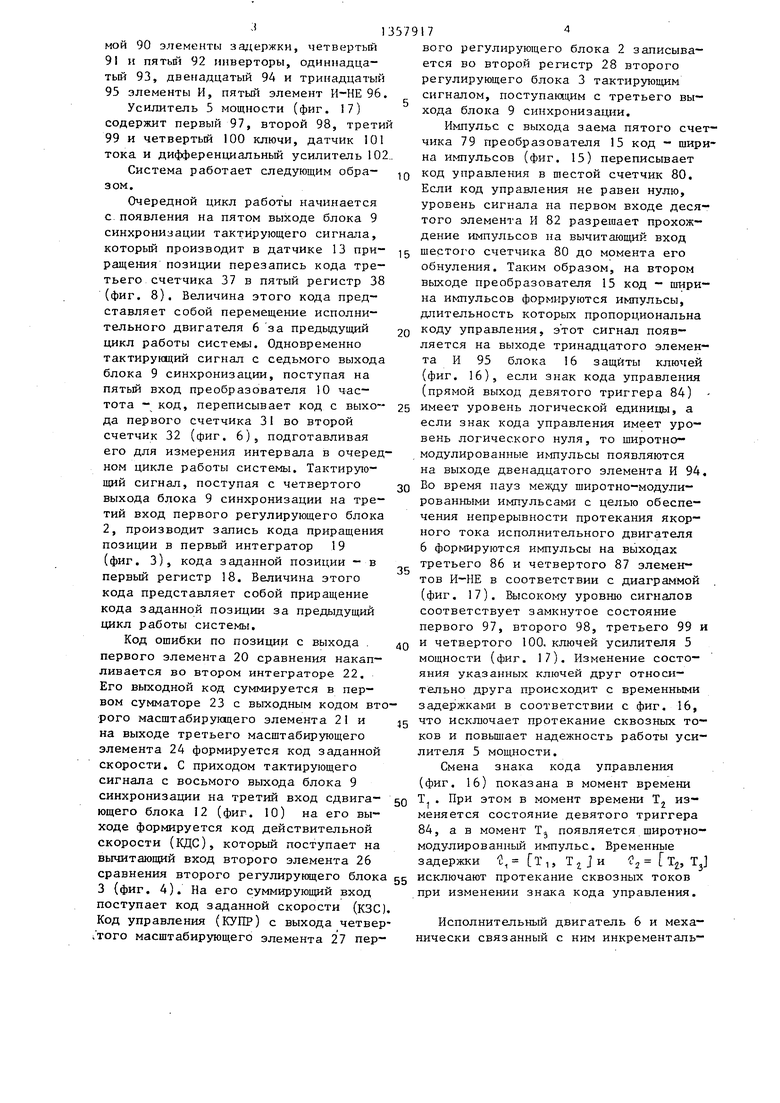
Первьй регулирующий блок 2(фиг, 3 содержит первый регистр 18, первый интегратор 19, первьй элемент 20 сравнения, второй масштабиpyюш й элемент 21, второй интегратор 22, первьй сумматор 23, третий масштабирую7 .. 2
щий элемент 24, первьй элемент 25 задержки.
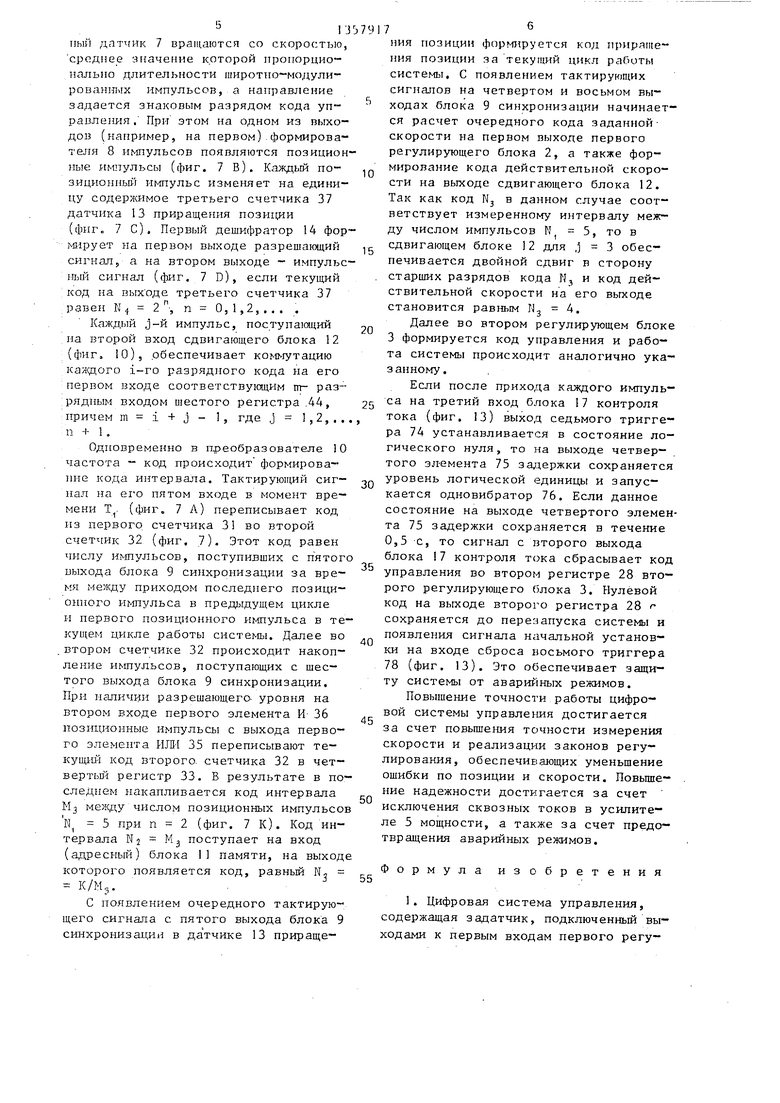
Второй регулирующий блок 3 (фиг, 4) додержит второй элемент 26 сравнения, четвертьй масштабирующий элемент Z7 и второй регистр 28.
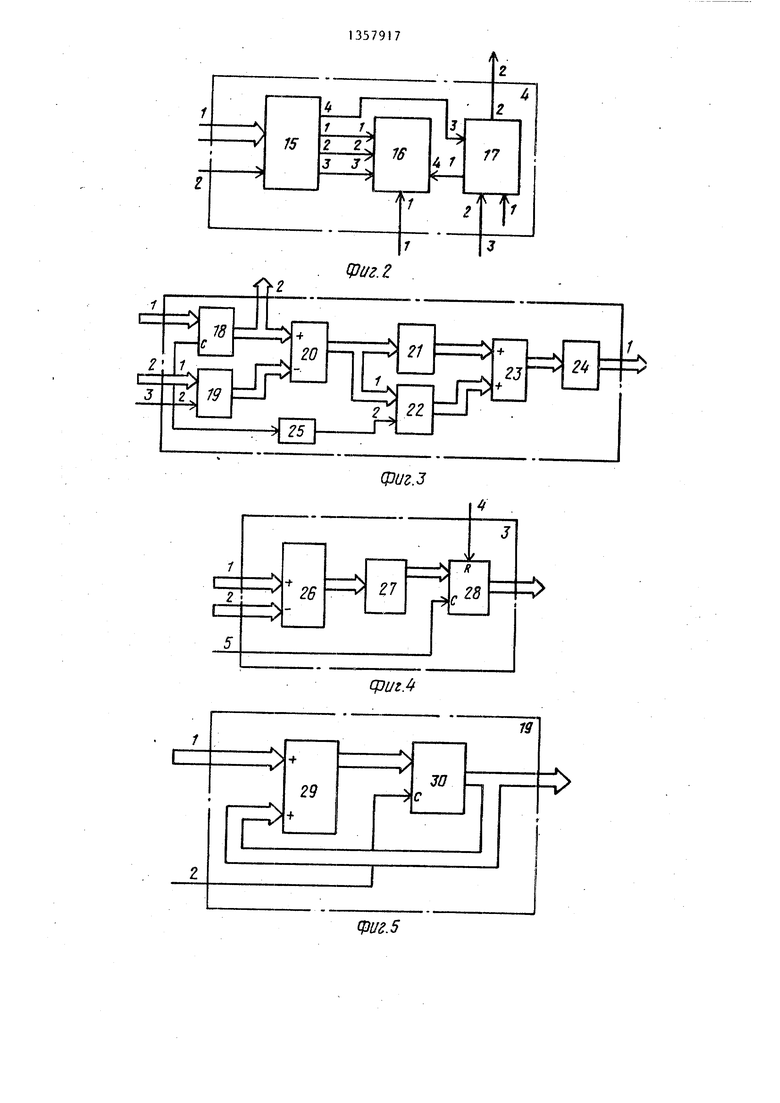
Первый интегратор 9 (фиг, 5) содержит второй сумматор 29 и третий регистр 30.
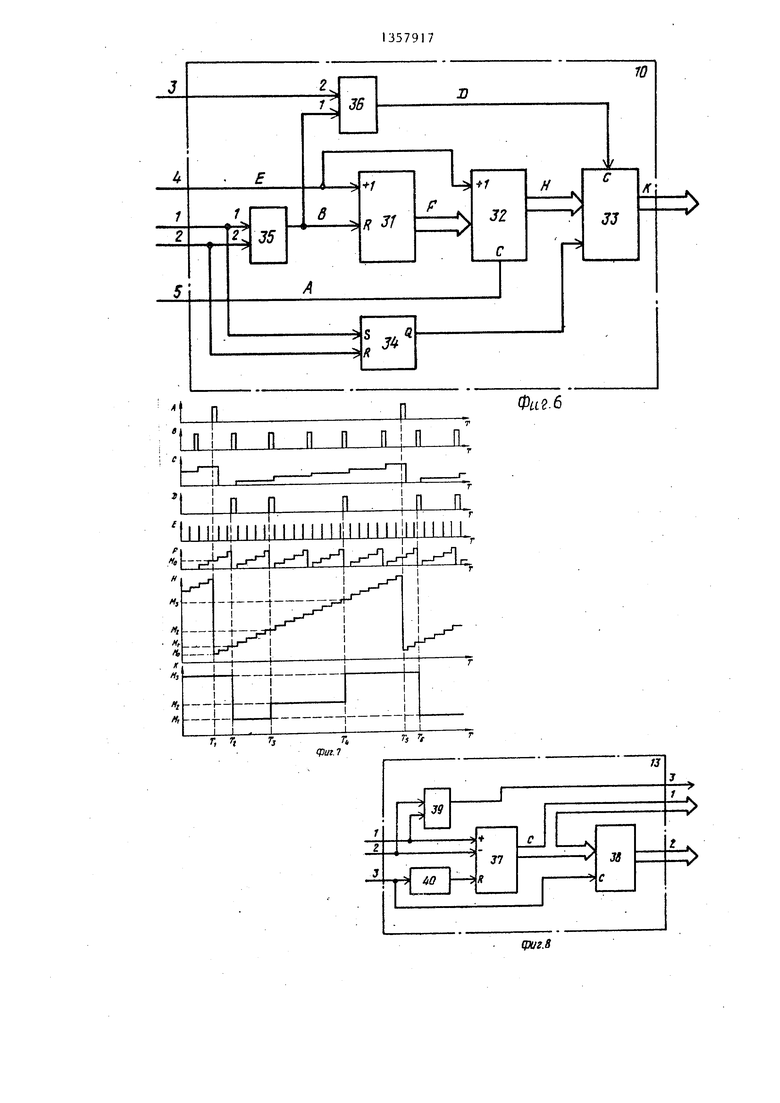
Преобразователь 10 частота код (фиг, 7) содержит первый 31 и второй 32 счетчики, четвертьп регистр 33, первый триггер 34, первьй элемент ШШ 35 и первый элемент И 36,
Датчик 13 приращения позиции (фиг. 8) содержит третий счетчик 37, пятый регистр 38, второй элемент ИЛИ 39, второй элемент 40 задержки.
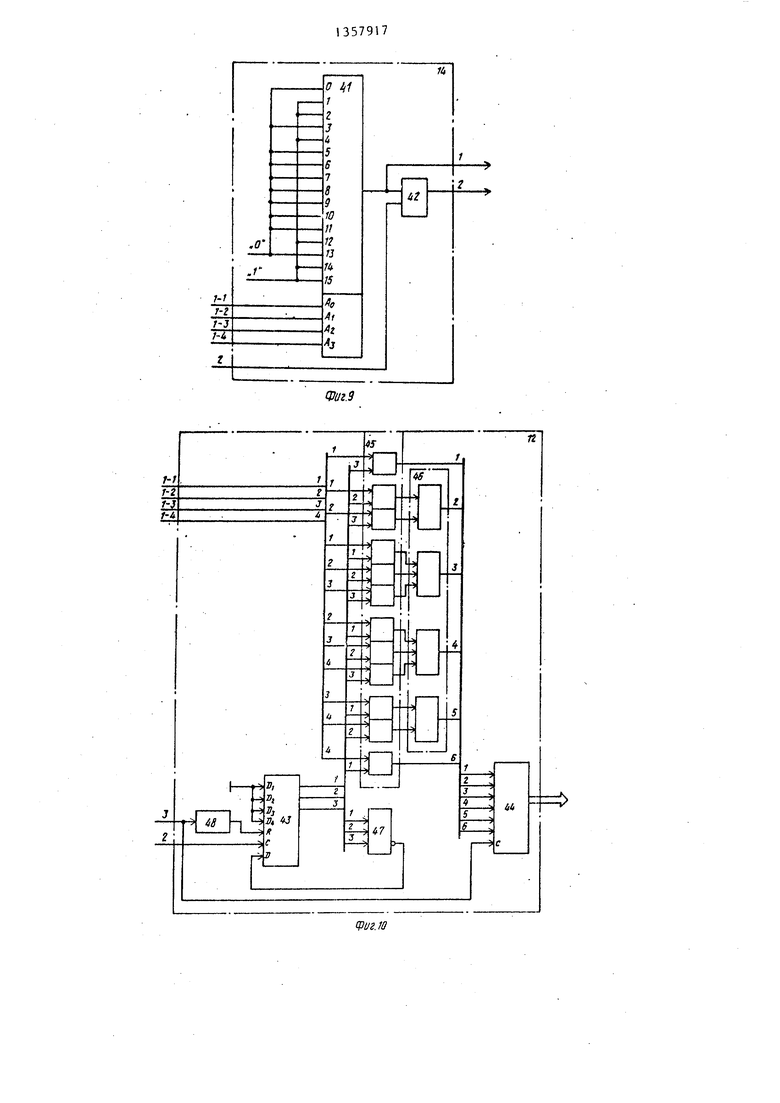
Первый дешифратор 14 (фиг, 9) содержит мультиплексор 41 и второй элемент И 42,
Сдвигаюцщй блок 12 (фиг, 10) содержит сдвиговый регистр 43, шестой регистр 44, первый блок 45 элементов И, блок 46 элементов ИЛИ, первый элемент ИЛИ-НЕ 47, третий элемент 48 задержки,
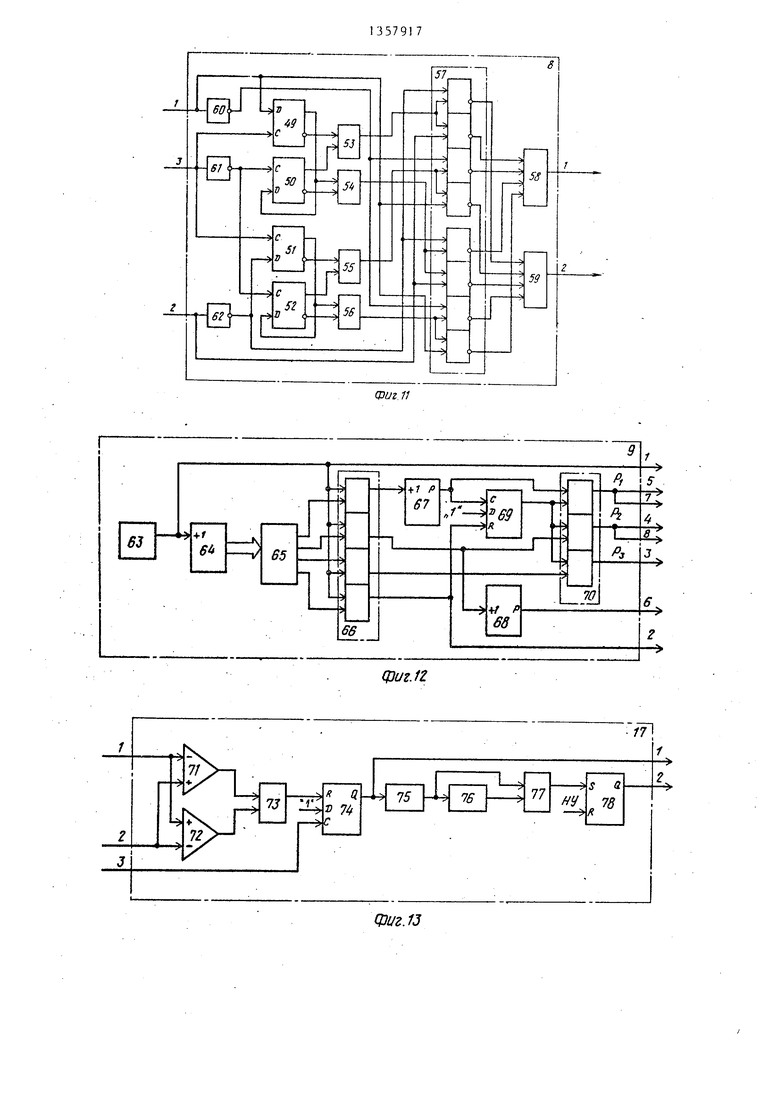
Формирователь 8 и fflyльcoв (фиг, 1 содержит второй 49, третий 50, четвертый 51 и пятый 52 триггеры, третий 53, четвертый 54., пятый 55 и шестой 56 элементы И., блок 57 элементов И-НЕ, седьмой 58 и восьмой 59 элементы И, первьй 60 второй 61 и третий 62 инверторы.
Блок 9 синхронизации (фиг, 12) содержит генератор 63, четвертый счетчик 64, второй дешифратор 65, второй блок 66 элементов И, первьш 67 и второй 68 делители частоты, шестой триггер 69, третий блок 70 элементов И,
Блок 17 контроля тока (фиг. 13) содержит первый 71 и второй 72 компараторы, третий элемент ИЛИ 73, седьмой триггер 74, четвертый элемент 75 задержки, одновибратор 76, девятьй элемент И 77, восьмой триггер 78,
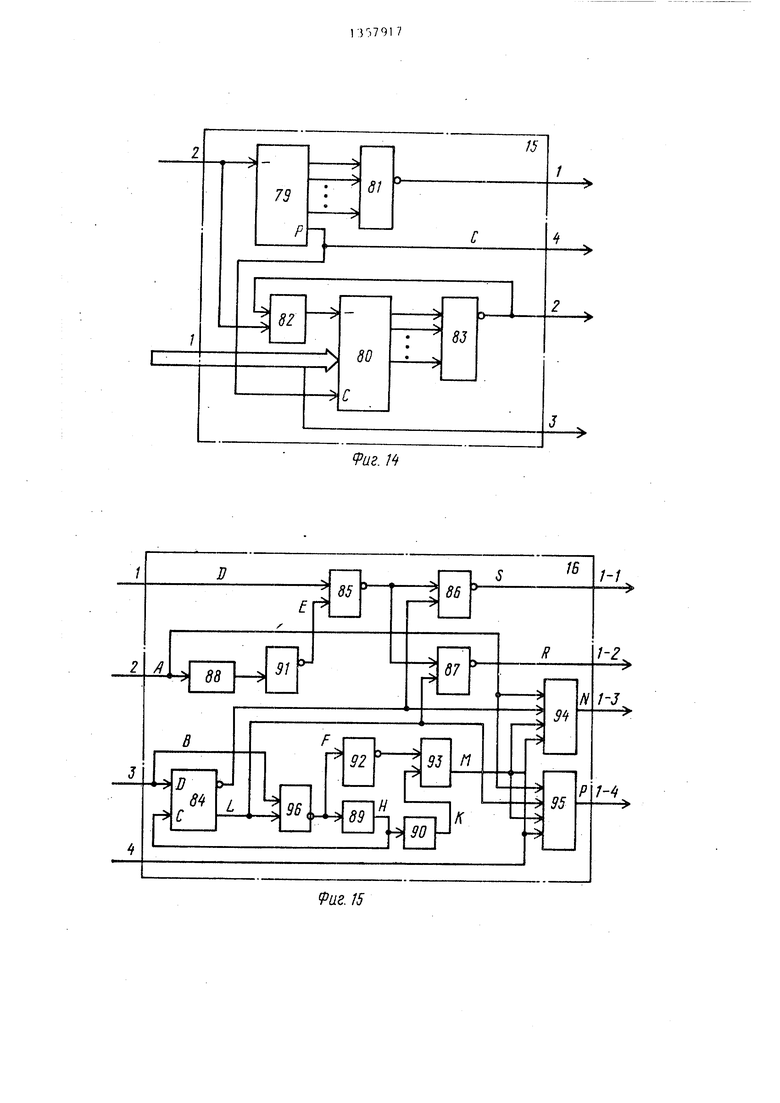
Преобразователь 15 код - ширина импульсов (фиг, 14) содержит пятый 79 и шестой 80 счетчики, первьй элемент И-НЕ 81, десятый элемент И 82, второй элемент Ш1И-НЕ 83,
Блок 16 защиты ключей (фиг, 15) содержит девятьй триггер 84, второй 85, третий 86 и четвертьй 87 элементы И-НЕ, пятый 88, шестой 89 и седь 1
мой 90 элементы задержки, четверть 91 н пятьп 92 инверторы, одиннадцатый 93, двер1адцатый 94 и тринадцатый 95 элементы И, пятый элемент И-НЕ96.
Усилитель 5 мощности (фиг. 17) содержит первый 97, второй 98, третий 99 и четвертый 100 ключи, датчик 101 тока и дифференциальный усилитель 102
Система работает следующим обра- зом.
Очередной цикл работы начинается с появления на пятом выходе блока 9 синхронизации тактирующего сигнала, который производит в датчике 13 при- ращения позиции перезапись кода третьего счетчика 37 в пятый регистр 38 (фиг. 8). Величина этого кода представляет собой перемещение исполнительного двигателя 6 за предьщущий цикл работы системы. Одновременно тактирующий сигнал с седьмого выхода блока 9 синхронизации, поступая на пятьш вход преобразователя 10 частота - код, переписывает код с выхо- да первого счетчика 31 во второй счетчик 32 (фиг. 6), подготавливая его для измерения интервала в очередном цикле работы системы. Тактирующий сигнал, поступая с четвертого выхода блока 9 синхронизации на третий вход первого регулирующего блока 2, производит запись кода приращения позиции в первый интегратор 19 (фиг. 3), кода заданной позиции - в первый регистр 18. Величина этого кода представляет собой приращение кода заданной позиции за предыдущий цикл работы системы.
Код ошибки по позиции с выхода . первого элемента 20 сравнения накапливается во втором интеграторе 22. Его выходной код суммируется в первом сумматоре 23 с выходным кодом второго масштабиругацего элемента 21 и на выходе третьего масштабирующего элемента 24 формируется код заданной скорости. С приходом тактирующего сигнала с восьмого выхода блока 9 синхронизации на третий вход сдвига- ющего блока 12 (фиг. 10) на его выходе формируется код действительной скорости (КДС), который поступает на вычитающий вход второго элемента 26 сравнения второго регулирунлцего блока 3 (фиг. 4). На его суммирующий вход поступает код заданной скорости (КЗС Код управления (КУПР) с выхода четвер i Toro масштабирующего элемента 27 пер
Q
g о 5 0
о 5 0 5
5
17
вого регулирующего блока 2 записывается во второй регистр 28 второго регулирующего блока 3 тактирующим сигналом, поступающим с третьего выхода блока 9 синхронизации.
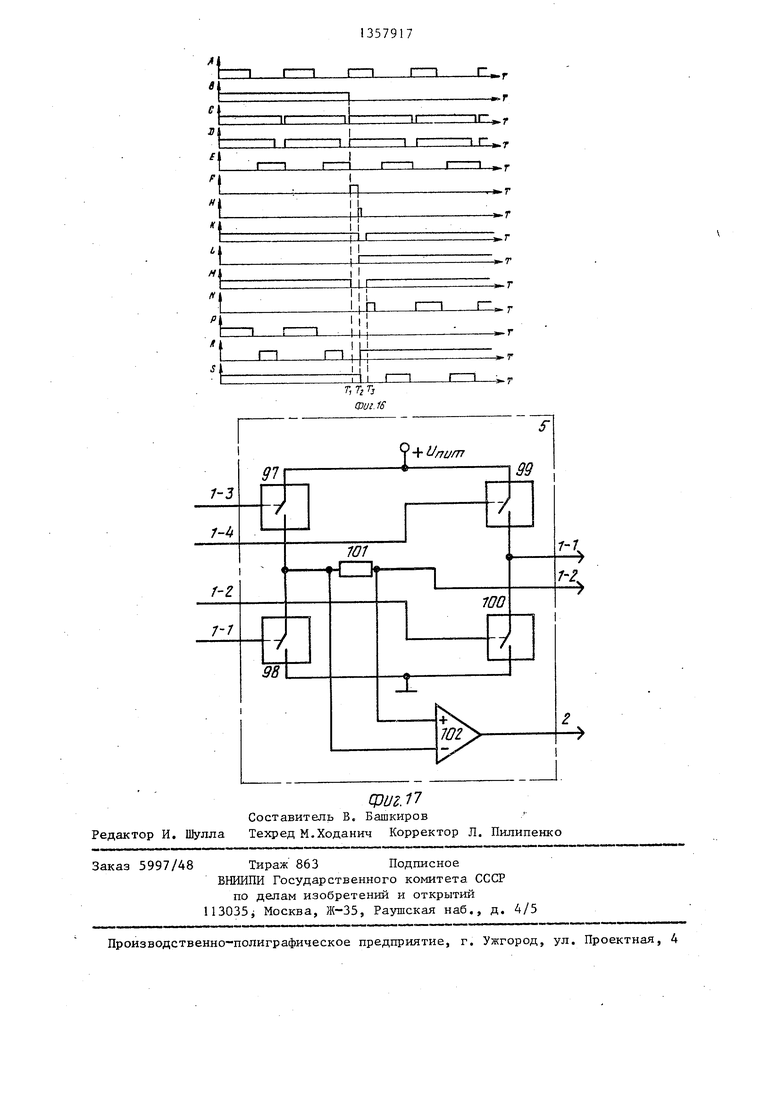
Импульс с выхода заема пятого счетчика 79 преобразователя 15 код - щири- на импульсов (фиг. 15) переписывает код управления в шестой счетчик 80. Если код управления не равен нулю, уровень сигнала на первом входе десятого элемента И 82 разрешает прохождение импульсов на вычитающий вход шесто1 О счетчика 80 до момента его обнуления. Таким образом, на втором выходе преобразователя 15 код - ширина импульсов формируются импульсы, длительность которых пропорциональна коду управления, этот сигнал появляется на выходе тринадцатого элемента И 95 блока 16 защиты ключей (фиг. 16), если знак кода управления (прямой выход девятого триггера 84) имеет уровень логической единицы, а если знак кода управления имеет уровень логического нуля, то широтно- модулированные импульсы появляются на выходе двенадцатого элемента И 94. Во время пауз между широтно-модули- рованными импульсами с целью обеспечения непрерывности протекания якорного тока исполнительного двигателя 6 формируются импульсы на выходах третьего 86 и четвертого 87 элементов И-НЕ в соответствии с диаграммой (фиг. 17). Высокому уровню сигналов соответствует замкнутое состояние первого 97, второго 98, третьего 99 и и четвертого 100, ключей усилителя 5 мощности (фиг. 17). Изменение состояния указанных ключей друг относительно друга происходит с временными задержкам- в соответствии с фиг. 16, что исключает протекание сквозных токов и повьшгает надежность работы усилителя 5 мощности.
Смена знака кода управления (фиг. 16) показана в момент времени Т. . При этом в момент времени T,j изменяется состояние девятого триггера 84, а в момент Tj появляется широтно- модулированньш импульс. Временные задержки -2, TI, IТ:, исключают протекание сквозных токов при изменении знака кода управления.
Исполнительный двигатель 6 и механически связанный с ним инкременталь-
иый датчик 7 вращаются со скоростью, сроднее значение которой проггорцно- иалыю длительности широтно-модули- рованш гх импульсов, а направление
задается знаковым разрядом кода управления , При этом на одном из выходов (например, на первом).формирователя 8 импульсов появляются позиционные импульсы (фиг. 7 в). Каждый по- зидио1П1г ш импульс изменяет на единицу содерла мое третьего счетчика 37 датчика 13 приращерпш позиг ии (фиг„ 7 с). Первый дешифратор 14 формирует на первом выходе разрешающий сигнал, а на втором выходе - импульсный сигнал (фиг, 7 D), если текущий код па вых оде третьего счетчика 37 рзвеп N 2 , п 0,1,2,.., .
Каждый j-й импульс, поступающий на второй вход сдвигающего блока 12 (фиг, 10), обеспечивает ком тадию i-ro разрядного кода на его первом входе соответствующим пт- раз- :рядным входом шестого регистра .44, причем m i + j - 1, где J 1,2,.. n + 1,
Одновременно в преобразователе 0 частота код происходит формирование кода интервала. Тактирующий сигнал на ei o пятом входе в момент времени Т . (фиг„ 7 Л) переписывает код из первого счетчика 31 во второй счетчик 32 (фиг. 7)- Этот код равен числу и тульсов, поступивших с пятог выхода блока 9 синхронизации за время между приходом последнего позиционного импульса в пред1)1дущем цикле и первого позиционного импульса в текущем цикле работы системы. Далее во втором счетчике 32 происходит накопление импульсов, поступающих с шестого выхода блока 9 синхронизации. При наличии разрешающего- уровня на втором входе первого элемента И 36 позиционные импульсы с выхода первого элемента ИЛ-1 35 переписывают те- кущи код второго, счетчика 32 в чет- BepTbDi регистр 33, В результате в последнем накапливается код интервала Мз меясду числом позиционных импульсо N 5 при n 2 (фиг, 7 К). Код интервала N2 Mj поступает на вход (адресный) блока 11 памяти, на выход которого появляется код, равньй N, - К/М.,.
С появлением очередного тактирую™ щего сигнала с пятого выхода блока 9 синхронизации в да тчике 13 прираще
5
0
5
0
g
5
0
5
0
7
}шя позиции формируется код прирягие- ния позиции за текущий цикл работы системы, С появлением тактирующих сигналов на четвертом и восьмом выходах блока 9 синхронизации начинается расчет очередного кода заданной- скорости на первом выходе первого регулирующего блока 2, а также формирование кода действительной скорости на выходе сдвигающего блока 12. Так как код Nj в данном случае соответствует измеренному интервалу между числом импульсов NI 5, то в сдвигающем блоке 12 для J 3 обеспечивается двойной сдвиг н сторону старших разрядов кода Nj и код действительной скорости на его выходе становится равным Н 4.
Далее во втором регулирующем блоке 3 формируется код управления и работа системы происходит аналогично указанному.
Если после прихода каждого импульса на третий вход блока 17 контроля тока (фиг. 13) выход седьмого тригге ра 74 устанавливается в состояние логического нуля, то на выходе четвертого элемента 75 задержки сохраняется уровень логической единицы и запускается одновибратор 76. Если данное состояние на выходе четвертого элемента 75 задержки сохраняется в течение 0,5 с, то сигнал с второго выхода блока I7 контроля тока сбрасывает код управления во втором регистре 28 второго регулирующего блока 3. Нулевой код на выходе второго регистра 28 сохраняется до перезапуска системы и появления сигнала начальной установки на входе сброса восьмого триггера 78 (фиг. 13). Это обеспечивает защиту системы от аварийных режимов.
Повышение точности работы цифровой системы управления достигается за счет повьш1е}шя точности измерения скорости и реализации законов регулирования, обеспечивающих уменьшение ошибки по позиции и скорости. Повьше- ние надежности достигается за счет исключения сквозных токов в усилителе 5 мощности, а также за счет предотвращения аварийных режимов.
Формула изобретения
1. Цифровая система управления, содержащая задатчик, подключенньш выходами к первым входам первого регу7135
лирующего блока, соединенного первыми выходами с первыми входами второго регулирующего блока, выходы которого подключены к первым входам блока коммутации ключей, второй вход которого соединен с первым выходом блока синхронизации, а первый выход - с входом усилителя мощности, соеди- немного первым выходом через испол- нительный двигатель с входом инкрементального датчика, вторым выходом- с третьим входом блока коммутации ключей, второй выход которого подключен к второму входу второго регулиру- ющего блока, первый и второй выходы инкрементального датчика соединены с одноименными входами формирователя импульсов, третий вход которого подключен к второму выходу блока синхро- низации, соединенного третьим и четвертым выходами соответственно с третьими входами второго и первого регулирующих блоков, отличающаяся тем, что, с целью повы- шения точности и надежности системы, в нее введены преобразователь частота - код, блок памяти, сдвигающий блок, дешифратор и датчик приращения позиции, первый и второй входы преоб- разователя частота - код и датчика приращения позиции соединены с соответствующими выходами формирователя импульсов, третий вход датчика приращения позиции подключен к пятому выходу блока синхронизации, а первый, второй и третий выходы - соответственно к первым входам дешифратора, вторым входам первого регулирующего блока и второму входу дешифратора. соединенного первым выходом с третьим входом преобразователя Ч астота - код четвертый и пятый входы которого подключены соответственно к шестому и седьмому выходам блока синхронизации а выходы через блок памяти - к первым входам сдвигающего, блока, соединенного вторым и третьим входами соответственно с вторым выходом дешифратора и восьмым выходом блока син- хронизации, а выходами - с вторыми входами второго регулирующего блока.
5 о 5 Q Q g Q
5
2.Цифровая система по п, 1, отличающаяся тем, что преобразователь частота - код содержит первьм и второй счетчики, регистр, триггер, элемент ИЛИ и элемент И, первый вход преобразователя частота - код соединен с S-входом триггера и первым входом элемента ИЛИ, а второй вход - с R-входом триггера и вторым входом элемента ИЛИ, подключенного выходом к входу сброса первого счетчика и первому входу элемента И, второй вход которого соединен с третьим входом преобразователя частота - код, а выход - с входом записи регистра суммирующие входы первого и второго счетчиков подключены к четвертому входу преобразователя частота - код, пятый вход которого соединен с входом записи второго счетчика, подключенного информационньми входами к информационным выходам первого счетчика, а информагщонными выходами - к первым информационным входам регистра, второй информационный вход которого соединен с выходом триггера, а информационные выходы - с выходами преобразователя частота - код.
I
3.Цифровая система по п. 1,отличающаяся тем, что, блок коммутации ключей содержит блок защиты ключей, блок контроля тока и преобразователь код - ширина импульса, первые и второй входы которого соединены с соответствующими входа ш блока коммутации ключей, а первый, второй и третий выходы - с соответствующими входами блока защиты клю-- ;.; чей, подключенного четвертым входом к первому выходу блока контроля тока, а первым,-вторым и третьим входами которого соединенного соответственно с шиной уставки тока, третьим входом блока коммутации ключей и четвертым выходом преобразователя код - ширина импульса, выход блока защиты ключей и второй выход блока контроля тока подключены соответственно к первому и второму выходам блока коммутации ключей.
20
2,
JT
иг.г
21
I-N
J
22.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для регулирования скорости электродвигателя | 1984 |
|
SU1267375A1 |
| Устройство для сопряжения вычислительной машины с датчиками | 1982 |
|
SU1070540A1 |
| Электропривод | 1987 |
|
SU1476584A1 |
| Устройство для поворота вектора | 1982 |
|
SU1076910A1 |
| Устройство для отображения графической информации на экране телевизионного приемника | 1981 |
|
SU1084865A1 |
| Преобразователь угловой скорости вала в код | 1983 |
|
SU1136312A1 |
| Способ управления электроприводом лифта с двухскоростным асинхронным электродвигателем и устройство для его осуществления | 1985 |
|
SU1307528A1 |
| Устройство для контроля процесса шлакообразования в конвертере | 1990 |
|
SU1710580A1 |
| ДОПЛЕРОВСКИЙ ИЗМЕРИТЕЛЬ СОСТАВЛЯЮЩИХ ВЕКТОРА СКОРОСТИ, ВЫСОТЫ И МЕСТНОЙ ВЕРТИКАЛИ ДЛЯ ВЕРТОЛЕТОВ И КОСМИЧЕСКИХ АППАРАТОВ ВЕРТИКАЛЬНОЙ ПОСАДКИ | 1995 |
|
RU2083998C1 |
| Устройство для поворота вектора (его варианты) | 1982 |
|
SU1078431A1 |
Изобретение относится к цифровым системам управления и может быть использовано в системах управления про- мьшшенными роботами, станками и другими механизмами. Цель изобретения - повышение точности цифровой системы управления, надежности ее работы. Цифровая система управления содержит задатчик 1, первый 2 и второй 3 регулирующие блоки, блок 4 коммутации ключей, усилитель -5 мощности, исполнительный двигатель 6, инкрементальный датчик 7, формирователь 8 импульсов, блок 9 синхронизации, преобразователь 10 частота - код, блок 11 памяти, сдвигающий блок 12, датчик 13 приращения позиции и дешифратор 14. Цель изобретения обеспечивается за счет введения элементов и блоков 10-14. При этом повышение точности достигается за счет повышения точности измерения скорости и реализации законов регулирования, обеспечивакг- щих уменьшение ошибок по положению и по скорости. Повьшгенне надежности достигается за счет исключения сквоз- ных токов в усилителе мощности и пре- S дотвращения аварийных режимов. 2 з.п. ф-лы, 17 ил. (Л со СП СО
-N
29
Фиг.з
cput.
V
c
JJ
иг.5
т, т
Q3uz.fZ
т
Фиг.гз
9иг. /4
иг. 15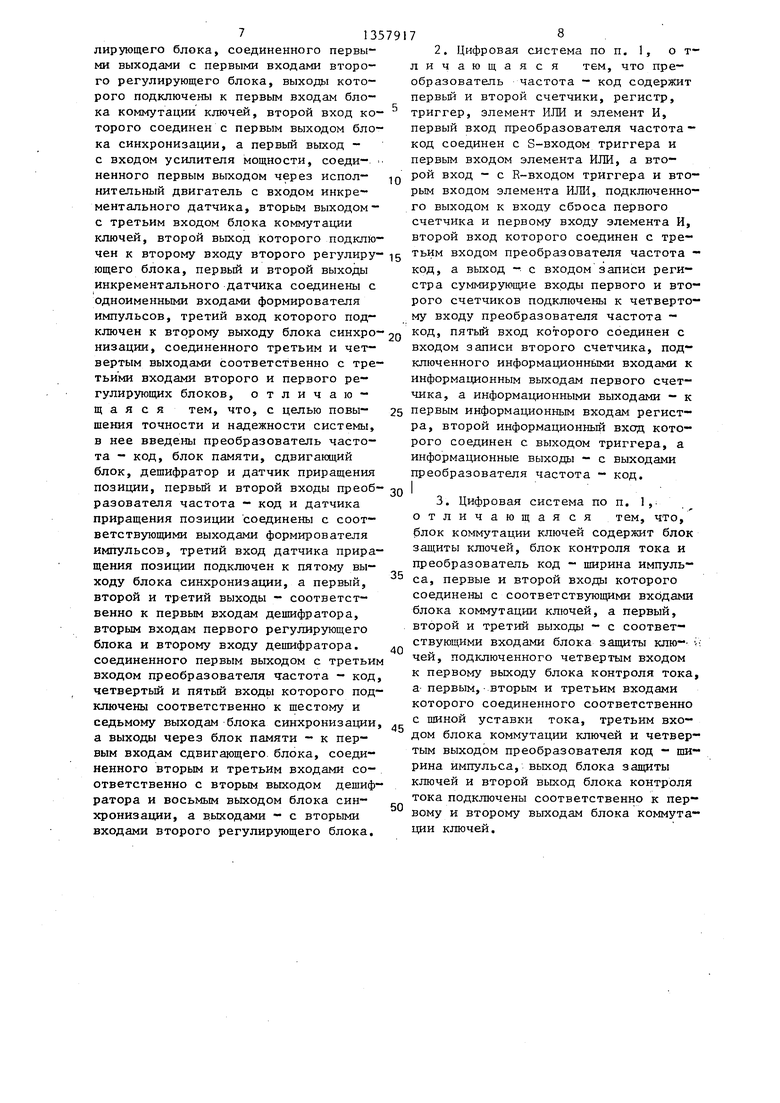
| Приборы и д ехника эксперимента | |||
| Приспособление для изготовления в грунте бетонных свай с употреблением обсадных труб | 1915 |
|
SU1981A1 |
| Прибор, замыкающий сигнальную цепь при повышении температуры | 1918 |
|
SU99A1 |
