Изобретение относится к измерительной технике и может найти применение в приборах и измерительных информационных системах, предназначенных для высокоточного измерения перемещений и других неэлектрических величин, преобразованных в этот параметр.
Целью изобретения является устранение перечисленных недостатков известных датчиков и повышение точности измерения линейных перемещений за счет того, что датчик линейных перемещений, содержит полый цилиндрический корпус, размещенные внутри него немагнитный каркас с намотанной на него дифференциальной соленоидной катушкой индуктивности, установленный на оси датчика с возможностью перемещения ферритовый сердечник.
предназначенный для изменения положения катушки вдоль оси датчика в процессе измерения, якорь которого прикреплен к торцу каркаса, и узел установки катушки индуктивности в двух положениях на фиксированном расстоянии одно от другого.
Структурная схема предлагаемого датчика представлена на фиг.1; на фиг.2 - сечение А-А на фиг.1; на фиг.З - сечение Б-Б на фиг.1.
Датчик содержит корпус 1, выполненный в виде полого цилиндра с торцевыми крышками. Внутри корпуса 1 размещена дифференциальная катушка 2 индуктивности, имеющая идентичные секции 3 -4 и 4-5 и намотанная на немагнитном каркасе 6. Внутри катушки 2 индуктивности соосно с ней размещается сердечник 7, закреплен00
го о
ю о
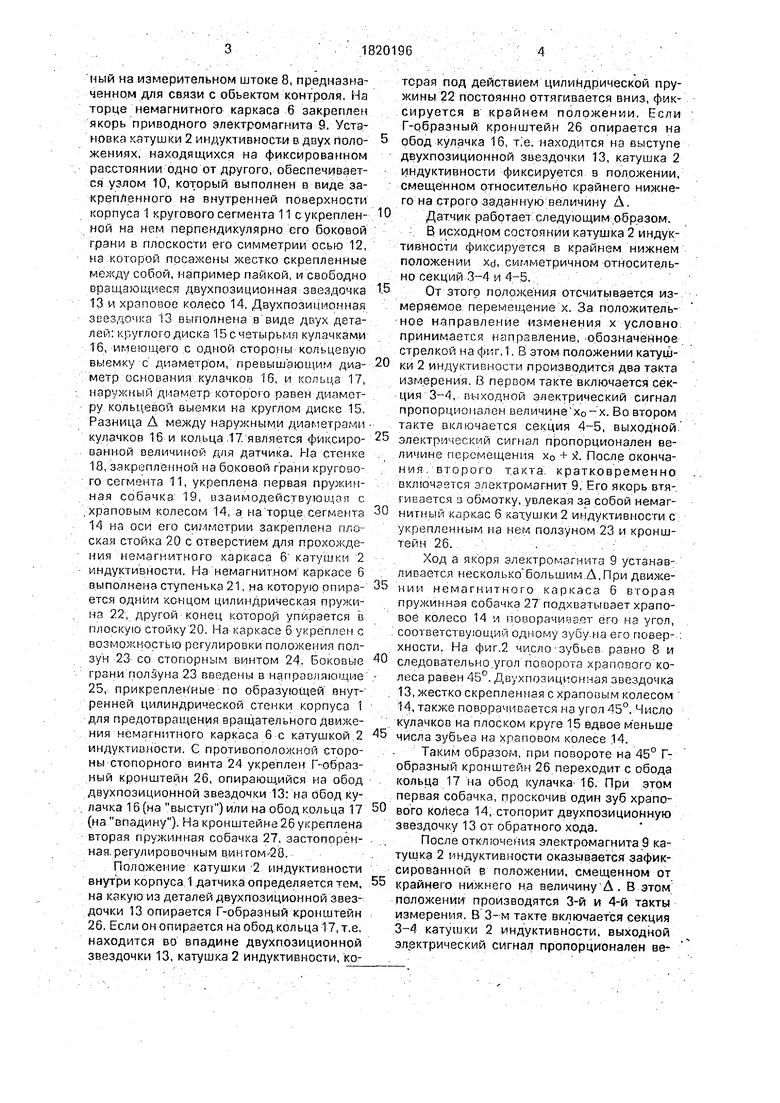
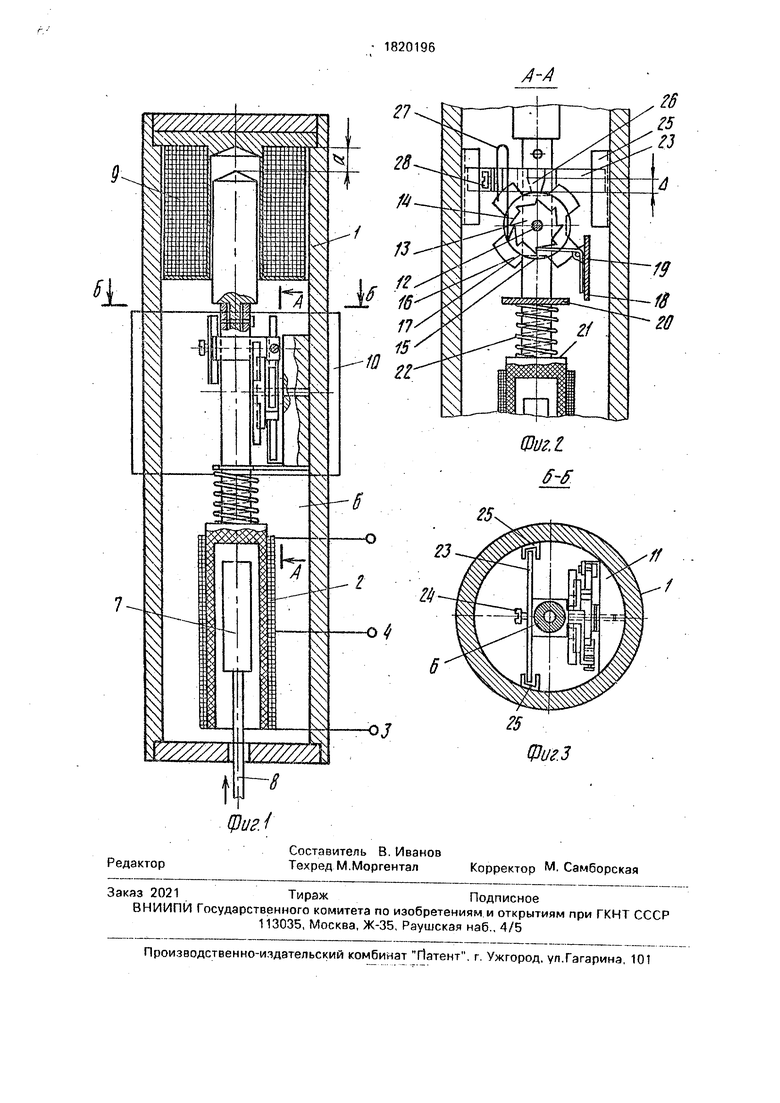
ный на измерительном штоке 8, предназначенном для связи с объектом контроля. На торце немагнитного каркаса 6 закреплен якорь приводного электромагнита 9. Установка катушки 2 индуктивности в двух поло- жениях, находящихся на фиксированном расстоянии одно от другого, обеспечивается узлом 10, который выполнен в виде закрепленного на внутренней поверхности корпуса 1 кругового сегмента 11 с укреплен- ной на нем перпендикулярно его боковой грани в плоскости его симметрии осью 12, на которой посажены жестко скрепленные между собой, например пайкой, и свободно вращающиеся двухпозидион нал-звездочка 13 и храповое колесо 14. Двухпозиционная звездочка 13 выполнена .в виде двух деталей: круглого диска 15 с четырьмя кулачками 16, имеющего с одной стороны кольцевую выемку С диаметром, превышающим диа- метр основания кулачков 16, и. кольца 17, наружный- диам.етр-которого равен диаметру кольцевой выемки на круглом диске 15, Разница А между наружными диаметрами кулачков 16 и кольца .17/является фйксиро- ванной величиной для датчика. На стенке 18,- закреплённой на бо.ковой грани кругового сегмента 11, укреплена первая пружин- ная собачка. 19, взаимодействующая с .храповым колесом 14. .а на торце, сегмента 14 на оси его симметрии закреплена плоская стойка 20 с отверстием для прохождения немагнитного каркаса б катушки 2 индуктивности. На немагнитном каркасе 6 выполнена ступенька 21, на которую рпира- ется одним концом цилиндрическая пружина 22, другой конец которой упирается в плоскую стойку 20. На каркасе 6укреплен с возможностью регулировки положения ползун 23- со стопорным винтом 24. Боковые грани ползуна 23 введены в направляющие25. прикрепленные по образующей внутренней цилиндрической стенки корпуса I для предотвращения вращательного движения немагнитного каркаса 6 с катушкой.2 индуктивности. G. противоположной стороны стопорного винта 24 укреплен Т-образный кронштейн 26, опирающийся на обод двухпозиционной звездочки 13: на обод ку- . лачка 16 (на выступ) или на обод кольца 17 (на впадину). На кронштейне 26 укреплена вторая пружинная собачка 27, застопорен- ная,регулировочным вингом-58.
Положение катушки.-2 индуктивности внутри корпуса,1 датчика определяется тем, на какую из деталей двухпозиционной звездочки 13 опирается Г-образный кронштейн
26. Если он опирается на обод.кольца 17, т.е. находится во впадине двухпозиционной звездочки 13, катушка 2 индуктивности, которая под действием цилиндрической пружины 22 постоянно оттягивается вниз, фиксируется в крайнем положении. Если Г-образный кронштейн 26 опирается на обод кулачка 16, rie.-находится на выступе двухпозиционной звездочки 13, катушка 2 индуктивности фиксируется в положении, смещенном относительно крайнего нижнего на строго заданную величину А.
Датчик работает следующим,образом. : В исходном состоянии катушка 2 индуктивности фиксируется в крайнем нижнем положении xd, симметричном относительно секций 3-4 и 4-5... .
От этого положения отсчитывается измеряемое, перемещение х. За положительное направление изменения х условно принимается направление., обозначенное стрелкой на фиг.1. В этом положении катушки 2 индуктивности производится два такта измерения. В первом такте включается секция 3-4, выходной электрический сигнал пропорционален величине.. Хр - х. Во втором такте включается секция 4-5, выходной электрический сигнал пропорционален величине перемещения х0 + х. После окончания., второго такта, кратковременно включается электромагнит 9. Его якорь втягивается ц обмотку, увлекая за собой немагнитный каркас 6 катушки 2 индуктивности с укрепленным на нем ползуном 23 и кронштейн 26.. .. . . :
Ход а якоря электромагнита 9 устанавливается несколько большим.Д, При движении немагнитного каркаса 6 вторая пружинная собачка 21 подхватывает храповое колесо .14 и поворачивает его на угол, . соответствующий одному зубу.на его.поверхности. На фиг.2 число-зубьев, равно 8 и следовательно.угол поворота храпового колеса равен 45°. Двухпоаиционная звездочка
13. жестко скрепленная с храповым колесом
14. также поворачивается на угол 45°. Число кулачков на плоском круге 15 вдвое меньше числа зубьев на хр.аповом колесе 14,
Таким образом, при повороте на 45° Г- образный кронштейн 26 переходит с обода кольца 17 на обод кулачка 16. При этом первая собачка, проскочив один зуб храпового колеса 14,стопорит даухпозиционную звездочку 13 от обратного хода.
После отключения электромагнита 9 катушка 2 индуктивности оказывается зафиксированной в положении, смещенном от крайнего нижнего на величинуД. В этом положении производятся 3-й и 4-й такты измерения. В 3-м такте включается секция .3-4 катушки 2 индуктивности, выходной электрический сигнал пропорционален ееличине Хо г х + Л. В 4-м такте включается секция 4-5, выходной электрический сигнал пропорционален величине х0 + х +Д.
При аппроксимации функции преобразования датчика параболической зависимостью в результате четырех тактов имеем:
х NI -N2
(N3.-N4) -N2)
Таким образом, в предлагаемом датчи- ке обеспечивается идентичность условий измерения во всех четырех тактах за счет того, что все они проводятся при отключенном приводном электромагните 9, а фиксация катушки 2 индуктивности в двух положениях, расположенных на фиксированном расстоянии одно от другого, обеспечивается за счет конструктивных отличий датчика.
Кроме того, в предлагаемом датчике за счет его конструктивных особенностей обеспечивается высокая точность задания Д на величину которого не оказывает влияния вариация длины немагнитного каркаса и корпуса датчика.
В конечное выражение для х не входят нестабильные коэффициенты функции преобразования. Предлагаемый датчик обеспечивает снижение погрешности нелинейности, аддитивной и мультипликаивной погрешности всего тракта измерения, включая первичный преобразователь.
Технико-экономические преимущества атчика заключаются в обеспечении высокой точности измерения перемещений благодаря созданию в нем оптимальных словий для;автоматической коррекции погрешностей, которая осуществляется за чет проведения Цикла из четырех измерений в идентичных условиях. :
Ф о р м у л а и з-о б р е те н ия
1. Датчик линейных перемещений, соержащий полый цилиндрический корпус, азмещенный внутри него немагнитный
каркас с намотанной на него дифференциальной соленоидной катушкой индуктивности, установленный на оси датчика с возможностью перемещения ферритовый сердечник, 5 предназначенный для связи с объектом контроля, приводной электромагнит, предназначенный для изменения положения катушки вдоль оси датчика в процессе, измерений, якорь которого прикреплен к торцу
0 каркаса, и узел установки катушки индуктивности в двух положениях на фиксированном расстоянии одно от другого, отличающий с я тем, что, с целью повышения точности, узел установки катушки выполнен
5 в виде закрепленного на внутренней поверхности корпуса кругового сегмента, укрепленной на нем перпендикулярно боковой грани в плоскости его симметрии оси, свободно вращающихся на ней двухпозицион0 ной звездочки и храпового колеса, жестко скрепленных между собой, закрепленной на боковой грани кругового сегмента и взаимодействующей с храповым колесом первой пружинной собачки, закрепленной на
5 оси симметрии кругового сегмента плоской стойкие отверстием для прохождения каркаса е катушкой индуктивности, укреплен- ного на каркасе с возможностью регулировки положения плоского ползуна,
0 опирающегося на обод двухпозиционной звездочки Г-образного кронштейна, закрепленной на нем второй пружинной собачки, взаимодействующей с храповым колесом, и цилиндрической пружиной, один конец ко5 торой прикреплен к плоской стойке, а другой уперт в ступеньку, выполненную на торце немагнитного каркаса.
2. Датчик по п.1, отличающийся
.. тем, что двухпозиционная звездочка выпол0 нена в виде жестко скрепленных между собой и размещенных соосно круглого диска с четырьмя кулачками и кольца, на одной стороне круглого диска выполнена кольцевая выемка, дкаметр которой превышав диа5 метр основания кулачков и равен наружному диаметру кольца.
f
L
tl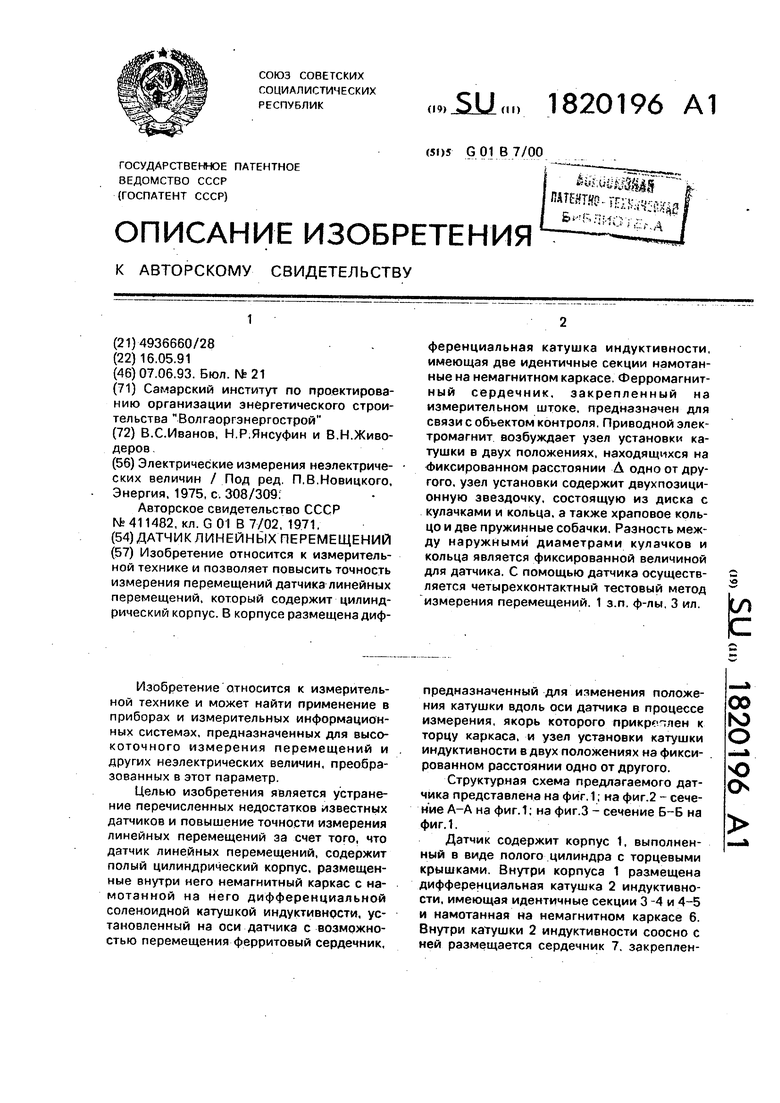

| название | год | авторы | номер документа |
|---|---|---|---|
| МЕХАНИЗМ ФИКСИРОВАНИЯ ДИАФРАГМЫ | 1992 |
|
RU2020529C1 |
| Роторно-конвейерная линия | 1983 |
|
SU1135608A1 |
| ПРЕОБРАЗОВАТЕЛЬ ЭНЕРГИИ ВЕТРА И ВОЛН | 2003 |
|
RU2254494C2 |
| Механизм управления плоскофанговой машиной | 1974 |
|
SU514049A1 |
| Шаговый конвейер | 1990 |
|
SU1720955A1 |
| Электромагнитный шаговый двигатель | 1977 |
|
SU731522A1 |
| Станок для изготовления из ленточного металла радиаторных пластин со скрученными спирально по перечными полосами | 1933 |
|
SU35797A1 |
| Электромеханический счетчик | 1980 |
|
SU1010631A1 |
| Машина для заготовки посадочных черенков, например, герани | 1932 |
|
SU36718A1 |
| Автоматический порционный дозатор с цифровым управлением | 1987 |
|
SU1439410A1 |
Изобретение относится к измерительной технике и позволяет повысить точность измерения перемещений датчика линейных перемещений, который содержит цилиндрический корпус. В корпусе размещена дифференциальная катушка индуктивности, имеющая две идентичные секции намотанные на немагнитном каркасе. Ферромагнитный сердечник, закрепленный на измерительном штоке, предназначен для связи с объектом контроля. Приводной электромагнит возбуждает узел установки катушки в двух положениях, находящихся на Фиксированном расстоянии Д одно от другого, узел установки содержит двухпозици- онную звездочку, состоящую из диска с кулачками и кольца, а также храповое кольцо и две пружинные собачки. Разность между наружными диаметрами кулачков и кольца является фиксированной величиной для датчика. С помощью датчика осуществляется четырехконтактный тестовый метод измерения перемещений. 1 з.п. ф-лы, 3 ил. fe
Фи г. I S-ff.
-о
oj
Фиг.З
| Электрические измерения неэлектрических величин / Под ред | |||
| П.В.Новицкого, Энергия, 1975, с | |||
| Распределительный механизм для паровых машин | 1921 |
|
SU308A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
