СЛ7.
4
СО
К peetfjiftmopy
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для регистрации параметров машин | 1988 |
|
SU1536416A2 |
| Устройство автоматического контроля глубины хода рабочих органов сельскохозяйственных машин и орудий | 1986 |
|
SU1329646A1 |
| Устройство для определения параметров контроля | 1985 |
|
SU1259291A1 |
| Устройство для автоматического измерения глубины амплитудной модуляции | 1979 |
|
SU781714A1 |
| Преобразователь фазового сдвига в цифровой код | 1983 |
|
SU1104438A1 |
| Измеритель плотности ткани по утку | 1982 |
|
SU1100340A1 |
| Цифровой фильтр с дельта-модуляцией | 1985 |
|
SU1347188A1 |
| Устройство для контроля объектов | 1988 |
|
SU1545231A1 |
| Устройство для определения значения параметра контроля | 1986 |
|
SU1416946A1 |
| Аналого-цифровой коррелятор | 1981 |
|
SU1019462A1 |
Изобретение относится к сельскохозяйственному машиностроению, а именно к средствам автоматического контроля и регулирования глубины хода рабочих органов почвообрабатывающих и посевных агрегатов. Целью изобретения является расширение функциональных возможностей устройства. Сущность работы устройства заключается в том, что сигнал, пропорци ональный текущей глубине хода рабочих органов, с датчика 1 поступает на нелинейный элемент 3, преобразуется в поток импульсов, которые поступают затем на входы счетчиков и аналого-цифровых преобразователей и затем оцениваются по заданным допускам контролируемых параметров. 2 ил.
0US.f
ttSRCSb
Изобретение относится к сельскохозяйственному машиностроению, а именно к средствам автоматического контроля и регулирования глубины хода рабочих органов почвообрабатывающих и посевных агрегатов.
Целью изобретения является расшиг-1 рение функциональных возможностей устройства.
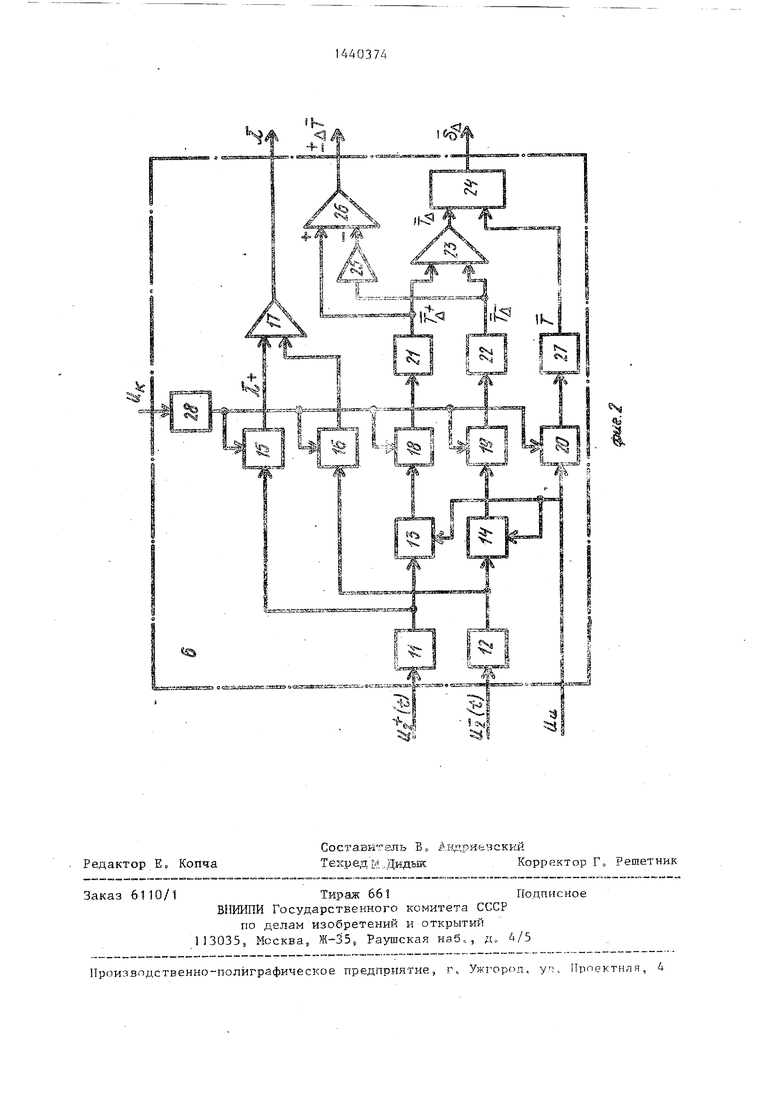
На фиг. 1 изображена схема устройства, на фиг. 2 - схема вычислительного блока.
Устройство содержит датчик 1 глубины хода рабочих органов, задатчик 2, нелинейный элемент 3 с регулируемой установкой Уст, ключ 4, программное реле 5, вычислительный блок 6, ключ 7, генератор 8 импульсов.
Устройство также содержит элемент 9 сравнения с регулируемыми установками Допуск и регистратор 10. Вычислительный блок б имеет третий вы- од с возможностью подключения к ре20 ки импульсов прямоугольной формы, которые одновременно поступают на входы временных селекторов 13 и 14, а также счетчиков 15 и 16, На выходе счетчиков 15 и 16 оцениваются на каж,гулятору глубины хода рабочих органовi25 дом интервале наблюдения частоты /ft
Вычислительный блок 6 содержит отклонение контролируемого паратакже формирователи 11 и .12 импуль- метра от заданного допуска соответсов, временные селекторы 13 и 14 и ,счетчики 15 и 16, сумматор 17 и счетчики 18-20. Кроме того, вычислительный блок 6 содержит цифроаналоговые преобразователи 21 и 22, сумматор 23 с блоком 24 деления, инвертор 25, соединенный с сумматором 26, цифроаналоговый преобразователь 27, одно- .тора 8 импульсов через второй ключ 7
вибратор 28 и диоды 29 и 30.
Устройство работает следующим образом.
Сигнал U(t), пропорциональный текущей глубине хода рабочих органов, с датчика 1 поступает на первый вход нелинейного элемента 3, на второй вход которого подан сигнал Un, пропорциональный заданной глубине хода (настроечное значение), с задатчика 2. На нелинейном элементе 3 с помощью уставки Уст установлено допуска емое значение на отклонение контролируемого параметра. С выхода нелинейного элемента 3 сигнал U(t), пред
45
подается одновременно на вход счетчика 20, благодаря чему на выходе циф роаналогового преобразователя 27 оценивается длительность интервала наблюдения Т, и на вторые входы временных селекторов 13 и 1.4, которые, от- крьшаясь соответственно импульсами Uj(t) и U(t),. пропускают поток импульсов ULI на входы счетчиков 18 и t9, благодаря чему на выходе цифро- аналоговых преобразователей 21 и 22 оцениваются длительности превышения контролируемым параметром заданного допуска в положительную и отрицательную Т л стороны. Сигналь Т и
ставляющий собой случайный поток им- 50 поступают на вход cyivMaTopa 23,
пульсов, характеризующий отклонение контролируемого параметра от заданного допуска, постзгаает 4ia первый вход ключа 4, второй вход которого
на выходе которого оценивается суммарное время превышения контролируемым параметром заданного допуска Тб. /Тд/+1 , одновременно сигнал Т
соединен с программным реле 5, кото- непосредственно, а сигнал Тд через
рое определяет периодичность контроля и интервал наблюдения. При поступлении сигнала UR с программного реле 5
инвертор 25 поступают на вход сумматора 26, на вькоде которого оценивается разность i U /-/Тд / данна заданный промежуток времени откры- Бается ключ 4, пропуская поток им- -; пульсов U/i(t), которые через встреч- но-включенные диоды 29 и 30 преобразуются в потоки импульсов Urt(t) и
UjCt) соответственно положительной и отрицательной полярности и поступают на первый и четвертый входы
вычислительного блока 6. Одновременно программное реле 5 открьшает второй ключ 7, который пропускает на второй вход вычислительного блока 6 поток импульсов Uu с генератора 8
импульсов.
Потоки импульсов Ug(t) и U(i (t) на первом и четвертом входах вычислительного блока 6 формирователями 11 и 12 импульсов преобразуются в потоки импульсов прямоугольной формы, которые одновременно поступают на входы временных селекторов 13 и 14, а также счетчиков 15 и 16, На выходе счетчиков 15 и 16 оцениваются на каждом интервале наблюдения частоты /ft
ственно в положительную и отрицательную сторону, которые на выходе сумма- тора 17 представляют собой частоту выброса случайного процесса за пределы допуска.
Поток импульсов Uu на втором входе вычислительного блока 6 с генера5
подается одновременно на вход счетчика 20, благодаря чему на выходе циф- роаналогового преобразователя 27 оценивается длительность интервала наблюдения Т, и на вторые входы временных селекторов 13 и 1.4, которые, от- крьшаясь соответственно импульсами Uj(t) и U(t),. пропускают поток импульсов ULI на входы счетчиков 18 и t9, благодаря чему на выходе цифро- аналоговых преобразователей 21 и 22 оцениваются длительности превышения контролируемым параметром заданного допуска в положительную и отрицательную Т л стороны. Сигналь Т и
0 поступают на вход cyivMaTopa 23,
на выходе которого оценивается суммарное время превышения контролируемым параметром заданного допуска Тб. /Тд/+1 , одновременно сигнал Т
непосредственно, а сигнал Тд через
инвертор 25 поступают на вход сумматора 26, на вькоде которого оценивается разность i U /-/Тд / дан31А
пых сигналов, представляющая собой сигнал рассогласования для регулятора глубины хода рабочих органов, благодаря чему компенсируется в автоматическом режиме отклонение контролируемого параметра от заданного допуска. Сигналы Тд и Т поступают на вход блока 24 деления, -на выходе которого получаем оценку С7г вероятности превышения контролируемым параметром заданного допуска за интервал наблюдения. Сигналы Я и д с вычислительного блока 6 поступают на входы элемента 9 сравнения, где с помощью регулируемых уставок Допуск установлены допускаемые значения частоты выбросов и ве- - оятности превышения допуска. При ,oi й сигналы U и Up с выхода элемента 9 сравнения поступают на регистратор 10, информируя о нарушении технологического процесса. По окончанию обработки информаци задним фронтом импульса U к запускается одновибратор 28, сигналом.с выхода которого по вторым входам осуществляется сброс счетчиков 15, 16, 18-20. Формула изобретения
Устройство контроля глубины хода рабочих органов сельскохозяйственных машин, содержащее датчик глубины хода рабочих органов, соединенный с , первым входом нелинейного элемента, второй вход которога подключен к за- датчику, а вькод соединен с первым входом первого ключа, второй вход которого подключен к выходу программного реле, которьй также соединен с пер вым входом второго ключа и с первым входом вычислительного блока, второй вход которого подключен к выходу второго ключа, а второй вход последнего соединен с генератором импульсов, вычислительный блок, первьй и второй выходы которого подключены соответственно к первому и второму входам элемента сравнения, выходы которого связаны с регистратором, а вычислительный блок содержит первый формирователь импульсов, вькод которого соединен с первым входом первого счетчика и с первым входом первого временного селектора, втррой счетчик, вход которого связан с выходом первого временного селектора, а выход соединен с входом первого цифроаналого374-. 4
вого преобразователя, три счетчика, причем второй вход первого временного селектора подключен к выходу второго ключа и к первому входу третьего счетчика, выход которого через второй цифроаналоговый преобразователь подключен к первому входу блока деления, при этом выход последнего
Q соединен с вторым входом элемента сравнения, а кроме того, содержит одновибратор, при этом выход однови- братора подключен к вторым входам первого, второго и третьего счетчи5 ков, а вькод соединен с выходом программного реле, отличающее- с я тем, что, с целью расширения функциональных возможностей устройства, в него введены два диода, а
0 вычислительный блок снабжен вторым формирователем импульсов, вторым временным селектором, четвертым и пятым счетчиками, вторым цифроаналоговым преобразователем, тремя сумматорами
5 и инвертором, причем вход второго формирователя импульсов подключен к аноду второго диода, а выход - к первому входу четвертого счетчика и первому входу второго временного
0 селектора, второй вход которого под-, ключей к выходу второго ключа, а вы-i ход соединен с первым входом пятого счетчика, при этом выход последнего посредством третьего цифроаналогово- го преобразователя подключен к первому входу первого сумматора и через инвертор к первому входу второго сумматора, второй вход которого соеди- ней с выходом первого цифроаналого вого преобразователя, а последний подтспючен к второму входу первого сумматора, выход которого связан с вторым входом блока деления, а выходы первого и четвертого счетчиков подключены к соответствуниц м входам первого сумматора, выход которого соединен с вторым входом блока деления, при этом, выходы первого и .четвертого счетчиков подключены к соответствующим входам третьего сумматора, а выход последнего связан с первьш входом элемента сравнения, а выход одновибратора подключен к вторым входам четвертого и пятого счетчиков, причем анод первого и катод второго диодов объединены и подключены к выходу первого ключа, а катод первого диода связан с входом первого формирователя импульсов.,
5
5 ,
0
5
| Устройство автоматического контроля глубины хода рабочих органов сельскохозяйственных машин и орудий | 1986 |
|
SU1329646A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
