Изобретение относится к области контрольно-измерительной техники и может быть использовано в производстве многожильных жестких световодбв и других длинномерных изделий, попереч ное сечение которых имеет -форму пра- вильных шестиугольника или треуголь- ника,
Цель изобретения повышение производительности контроля за счет одновременного по всем координатам конроля параметров объекта в плоской симметричной трехкоординатной системе при однократном позиционировании.
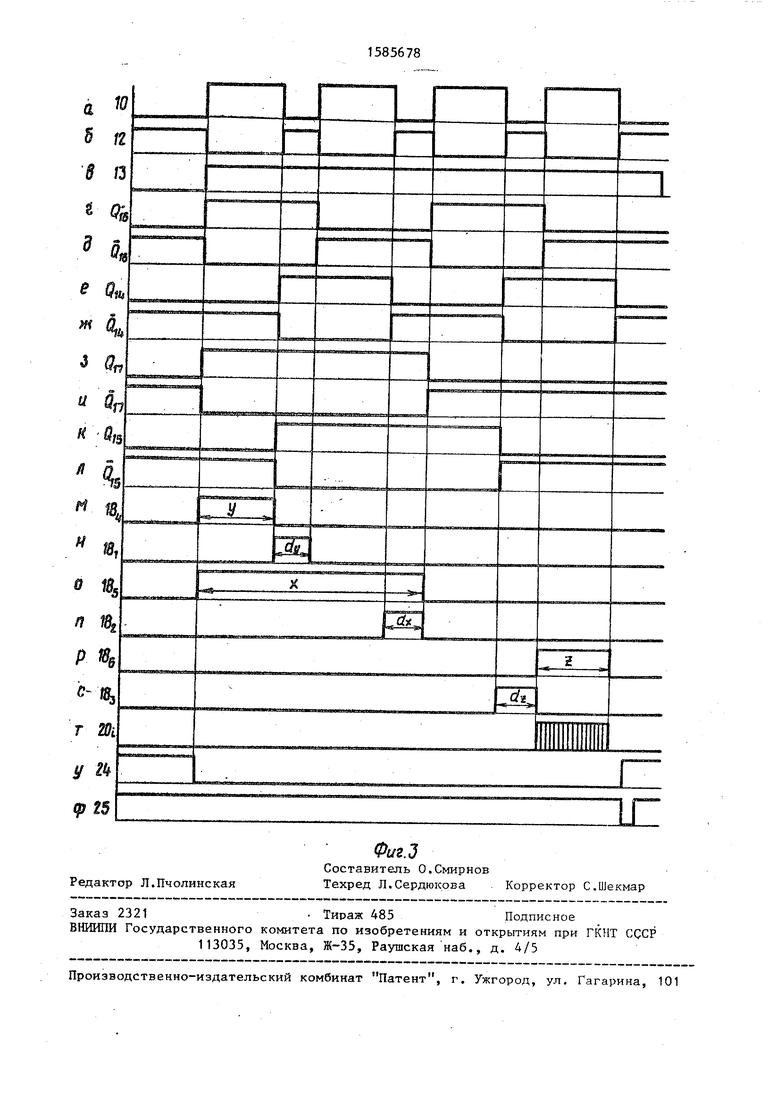
На фиг. 1 представлена блок-схема устройства; на фиг, 2 - временные i диаграммы информационных импульсов; на фиг, 3 - временные диаграммы, поясняющие работу устройства.
Устройство содержит лазер 1, рас- полсгженные по ходу его излучения бло 2 сканирования, выполненный в виде многогранного зеркала, установлен- ,ного с возможностью вращения с заданной частотой, объектив 3, два зеркалу 4 и 5, установленным под углом
о( 60 каждое к оптической оси объектива 3 симметрично относительно нее, установленные по ходу потоков излучения, отраженных зеркалами 4 и 5, фокусирующие линзы 6 и 7 и фотоприемники 8 и 9, усилитель 10, вход которого соединен с выходами фотоприемников 8 и 9, блок 11 временной селекции, состоящий из инвертора 12,
0
5
5
5
5
одновибратора 13, четырех D-триггеров 14-17 и шести трехвходовых злементов И 18 - ISjs при этом вход инвертора 12, вход одновибратора 13, счетньй вход третьего D-триггера 16 и третьи входы пятого и шестого элементов И и 18 соединены с выходом усилителя 10, R-вход каждого из D-триггеров 14-17 соединены с выходом одно- вибратора 13J счетный вход первого D-триггера 14 соединен с выходом инвертора 12, счетный вход второго D- триггера 15 и второй вход шестого элемента И 18 соединены с прямым выходом первого D-триггера 14, счетный вход четвертого D-триггера 17 и вторые входы первого, третьего и четвертого элементов И 18, 183 и18, соединены с прямым выходом третьего D-триггера ,165 первый, второй и тре тий входы пятого элемента И 18 объединены и соединены с прямым выходом чет вертого D-триггера 17,первые входы первого и второго элементов И 18, и 18 соединены с прямым выходом второго D-триггера 15, первые входы третьего, четвертого и шестого элементов И 18j, B и 18jj соединены с инверсным выходом второго D-триггера 15, третьи входы первого, второго и третьего элементов И 18 ,, 18 и 48 з соединены с выходом инвертора 12, второй вход второго элемента И 18 соединен с инверсным выходом третьего D-триггера 18j,. а инверсньй выход каждого из
D-триггеров 14-17 соединен с его D входом, шесть измерительных каналов 19, - 19j , каждый из которых состоит из последовательно соединенных элемента 20. заполнения, счетчикя 21 и буферного регистра 22., генератор 23 тактовой частоты, выход которого соединен °с первыми входами элементов
20.
заполнения всех шести измерительных каналов
, 19,, вторы
входы которых соединены соответственно с выходами шести элементов И 18 - 18, и последовательно соединенные первый и второй элементы 24 и 25 задержки, при этом вход первого элемента 24 задержки соединен с выходом усилителя 10, счетные входы буферных регистров 22 - 22j всех шести измерительных каналов 19, - 19 объединены и соединены с выходом первого элемента 24 задержки, а R-входы счетчиков 21 - 21, всех шести измерительных каналов 19 - 19 объединены и соединены с выходом второго элемента 25 задержки.
Устройство работает следующим образом.
Излучение лазера 1 попадает на многогранное вращаюшееся зеркало блока 2 сканирования, отражается от его граней, претерпевая угловую развертку, и попадает в объектив 3, который создает изображение точечного источника (лазера 1) в зоне измерения и осуществляет преобразование развертки из угловой в линейную. Поток излучения, выходящий -из объектива 3, отражаясь от зеркал 4 и 5, претерпевает отражение, разделяясь на два потока, .развернутых друг относительно друга на угол 120°. Объект 26 помещает в зоне пересечения потоков излучения (прямого - от объектива 3 и отраженных - от зеркал 4 и 5) таким образом, что его продольная ось перпендикулярна осям всех трех потоков, и позиционируют, например, таким образом, чтобы противоположные грани объ&кта 26 (допустим, что объект 26, например, представляет собой шестигранник) были параллельны оси потока излучейия.
Таким образом, формируется система из трех потоков излучения, развернутых в одной плоскости друг относительно друга на угол 120°, в которой обеспечивается измерение параметров объекта 26 (в данном слу1585678
10
15
20
чае двойных апофем шестиугольника - поперечного сечения) в трех координй - тах X, Y и Z, соответствующих теневым импульсам от объекта 26 ч иьтульсам засветки в прямом потоке и потоках, отраженных от зеркал 4 и 5. Разделенный зеркалами 4 и 5 поток излучения попадает на фокусирующие линзы 6 и 7, которые собирают его на фотоприемники В и 9, вырабатывающие информационные сигналы, поступающие на вход усилителя 10.
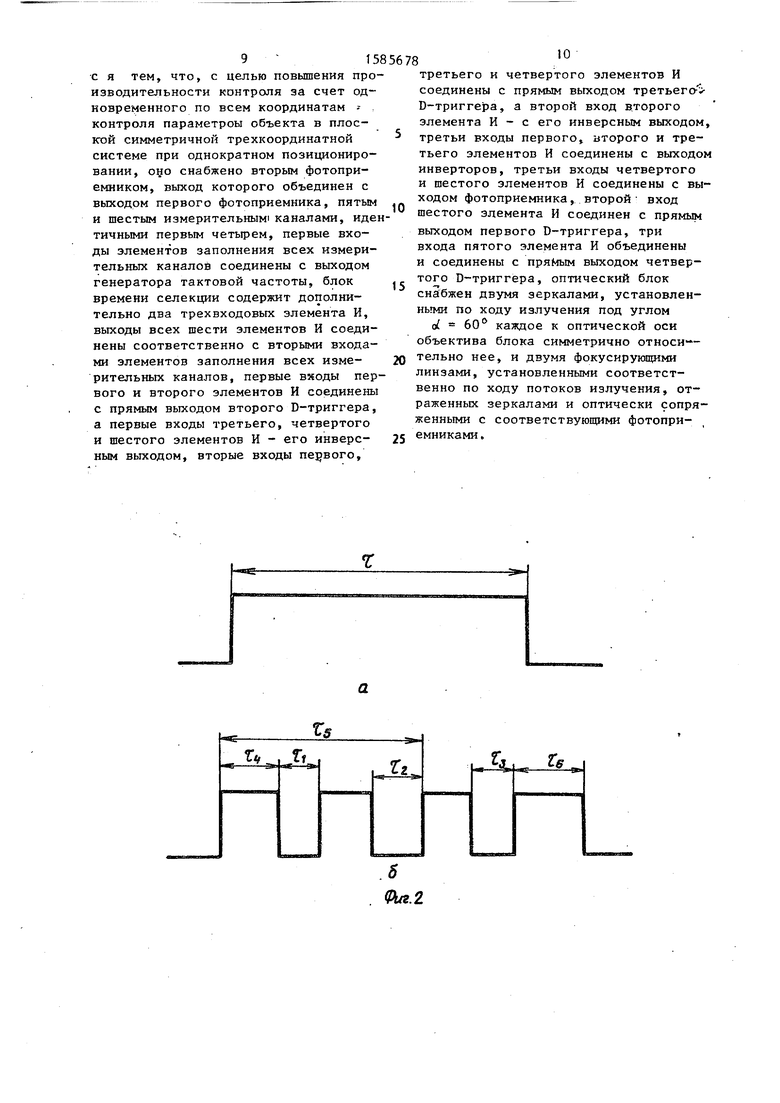
Информационные сигналы с выхода усилителя 10 представляют собой им- пульс засветки и теневые импульсы (фиг. 2). В отсутствие объекта 26 сигнал представляет собой импульс засветки (фиг. 2а), длительность которого t равна времени сканирования. В случае наличия объекта 26 в зоне сканирования на импульсе засветки появляются теневые импульсы (.фиг. 2б), длительность которых ( f , 5 2 - э определяется частотой вращения многогранного зеркала блока 2 сканирования, фокусным расстоянием объектива 3. и равна времени прохождения лазерного луча через объект 26, т.е. пропорциональна размеру объекта 26. Время 4 (Фиг. 2б) меж- ДУ начальным фронтом светового импульса и начальным фронтом первого теневого импульса несет информацию о положении объекта по координате Y, так -хак эта часть информационного импульса получается от пересечения объекта 26 отраженным от зеркала 4 световым потоком, соответственно теневой импульс длительностью С несет информацию о двойной апофеме объекта 26 по координате Y. Время
,5 (фиг. 2б) между последним фронтом светового импульса и вторым фгюн- том третьего теневого импульса несет информацию о положении объекта 26 по координате Z, так как эта часть ин- формэционного импульса получается от пересечения объекта 26 световым потоком, отраженным зеркалом 5, соответственно теневой импульс длительностью несет информацию о двойной апо-
0
5
0
5
0
.
5
феме объекта 26 по координате Z. Теневой импульс длительностью 1. несет информацию о двойной апофеме по координате X, импульс о положении объекта 26 по координате X, получаемую от пересечения с ним прямого светового потока.
7
Единственным ограничением в работ устройства является невозможность измерения параметров объекта, когда он находится в точке а стыка зеркал 4 к 5 (фиг, 1)„ В этом случае измерение происходит только по одной координате X, и блок 11 временной селек- 1щи вьщает лолсную информациге,
Усиленные информационные сигналы с усилителя 10 (фиг. За) поступают н блок 1Г временной селекции, выделяю щий импульсы, несзшяе информацию о координатах Х, Y и Z ( фиг. 3м,-Зо и Зр) и диаметре по координатам X. Y и Z (фиг, Зн, Зп, 3с). На выходе инвертора 12 сигнал имеет вид, показанный -на фиг „ Зб, на прямьгк выходах D-триггеров 14-17 формируются сигналы, изображенные соответственно
20
на фиг. Зе, Зк, Зг,, Зз, а на обратном выходе D-триггеров 14-17 - сигналы/ Ф показанные соответственно на фиг, Зжу 3л5 ЗДэ Зи, Сигнал;с одновибратора 13 (фиг., Зв) j длительность которого 25 больше длительности импульса засвети, используется для обнуления D- риггеров |4--17,
Сигналы с блока 11 временной сапек-- ии поступают в соответствующие из- ,|д ерительные каналы 19 - 19 ; смещеия по X (19,5-) смещения по Y (194) мещения по Z (19), двойной : апофемы
чи в ко ще ме гр тр си ме Yj пр
ни ри ны св оп пр со че ме до ве ны не ка хо пе до Dпече мы дТы ла лед пол ги и д эл ко ем вх изм го вх ных
по координате X (
двойной апофемы по координате Y (19|)5 двойной апофемы по координате Z () на вход элемента 20. эаполнени я, где происходит заполнение ш шульсами ге нератора 23 тактовой частоты (фиг,3т Счетчик 21. подсчитывает число импульсов, пропорциональное измеряемыг. параметрам объекта 26 Выходной скг нал счетчика 21. в параллельном коде поступает на информационные входы буферного регистра 22|, Запись информации в буферный регистр 22. осуществляется по переднему фронту импульса, формируемого первым элементом 24 задержки (фиг, Зу), а сброс счетчика 2.1. происходит после записи информации в буфернью регистр 22. коротким импульсом, формируемым вторым элементом 25 задержки () Длительность импульса, формируемого первым элементом 24 задержки (фиг.Зу) должна быть больше длительности импульса, формирз емого одновибратором -13 (фиг„ Зв)5 обнуляющим D-триггеры 14-17.
0
0
8
Выходная информация с буферного регистра 22. может подаваться на
Ф 5
внешние, по отношению к рассматривае-, мому, устройства индикации, управления пол9жением измеряемого о бъекта, на цифроаналоговый преобразователь и т„д.
Таким образом, устройство обеспечивает измерение положения объекта в трехкоординатной симметричной плоской системе (по осям X, Y, Z) и осуществление контроля правильности геометрических форм длин юмерных шестигранников и трехгранников сразу по трем координатам X, У,, Z в указанной системе по критерию равенства параметров измерений по координатам Х, Yj Z, чем обеспечивается повышенная производительность контроля.
рмула изобретения
5
Q
5
Ф 5
д
Устройство для измерения положения и контроля правильности геометрических форм длинномерных многогранных объектов,; содержащее оптически связанные лазер, блок сканирования, оптический блок с объективом, фото- приемник, блок временной селекции, содержащий инвертор, одновибратор, четыре Б-триггера, включенные по схеме деления на два, и четыре трехвхо- довьгх элемента И, при этом вход инвертора, вход одновибратора и счетный вход третьего D-триггера соединены с выходам фотоприемника, R-вход каждого из D-триггеров соединен с выходом одновибратора, счетньй вход первого D-триггера соединен с выходом инвертора, счетный вход второго Dтриггера соединен с прям1)1м выходом первого D-триггера, счетньш вход четвертого D-триггера соединен с пря- мым выходом третьего D-триггера, че- дТыре идентичных измерительных канала, каждый из которых состоит из последовательно соединенных элемента заполнения, счетчика и буферного регистра, генератор тактовой частоты и два последовательно соединенных элемента задержки, вход первого из которых соединен с выходом фотоприемника, а выход соединен со счетными входами буферных регистров четырех измерительных -каналов, выход второго элемента задержки соединен с R- входам-1 счетчиков четырех измерительных каналов, отличающеес я тем, что, с целью повьшения производительности контроля за счет одновременного по всем координатам -- контроля параметроы объекта в плоской симметричной трехкоординатной системе при однократном позиционировании, оцо снабжено вторым фотоприемником, выход которого объединен с выходом первого фотоприемника, пятым и шестым измерительным каналами, идетичными первым четырем, первые входы элементов заполнения всех измерительных каналов соединены с выходом генератора тактовой частоты, блок времени селекции содержит дополнительно два трехвходовых элемента И, выходы всех шести элементов И соединены соответственно с вторыми входами элементов заполнения всех изме- рительных каналов, первые входы первого и второго элементов И соединены с прямым выходом второго D-триггера, а первые входы третьего, четвертого и шестого элементов И - его инверс- ным выходом, вторые входы первого.
третьего и четвертого элементов И соединены с прямым выходом третьего- ;- D-триггера, а второй вход второго элемента И - с его инверсным выходом третьи входы первого, второго и третьего элементов И соединены с выходом инверторов, третьи входы четвертого и шестого элементов И соединены с выходом фотоприемника, второй вход шестого элемента И соединен с прямым выходом первого D-триггера, три входа пятого элемента И объединены и соединены с прямым выходом четвертого D-триггера, оптический блок снабжен двумя зеркалами, установленными по ходу излучения под углом
0 60 каждое к оптической оси объектива блока симметрично относительно нее, и двумя фокусирующими линзами, установленными соответственно по ходу потоков излучения, отраженных зеркалами и оптически сопряженными с соответствующими фотоприемниками .
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения положения и диаметра объекта | 1987 |
|
SU1441200A1 |
| Устройство для измерения диаметра стеклянной трубки | 1988 |
|
SU1651098A1 |
| Устройство для измерения параметров вибрации | 1990 |
|
SU1783318A1 |
| Устройство для измерения положения объекта | 1983 |
|
SU1272109A1 |
| Измеритель линейных перемещений | 1986 |
|
SU1401273A1 |
| СИСТЕМА АСТРООРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА | 1989 |
|
SU1795708A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ КООРДИНАТ МЕСТА ВЫСТРЕЛА ИЗ ОГНЕСТРЕЛЬНОГО ОРУЖИЯ (ВАРИАНТЫ) | 2008 |
|
RU2406964C2 |
| Устройство для бесконтактного измерения диаметров и перемещений изделий | 1987 |
|
SU1439402A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ РАЗМЕРА И ПОЛОЖЕНИЯ ИЗДЕЛИЯ | 1988 |
|
SU1828239A1 |
| Устройство для бесконтактного измерения диаметра изделий | 1983 |
|
SU1116310A1 |
Изобретение относится к контрольно-измерительной технике. Целью изобретения является повышение производительности контроля за счет одновременного по всем координатам контроля параметров объекта в плоской симметричной трехкоординатной системе при однократном позиционировании. Излучение лазера 1, отразившись от блока 2 сканирования, попадает в объектив 3, преобразующий угловую развертку в линейную. Отразившись от зеркал 4 и 5 поток излучения разделяется на два потока. Сформированная таким образом система трех потоков (прямого от объектива 3 и двух отраженных), развернутых в одной плоскости друг относительно друга на угол β = 120°, соответствует системе трех координат. Объект, помещенный в зону пересечения потоков, достаточно позиционировать один раз, например, для шестигранного объекта 26 - путем обеспечения параллельности его противоположных граней оси одного из потоков. В этом случае по импульсам засветки и теневым импульсам одновременно в каждом потоке определяются положение и двойная апофема объекта 26 по соответствующей координате, а контроль правильности его геометрических форм осуществляется путем сравнения результатов измерений по каждой из координат. Соответствующая обработка информационных импульсов осуществляется блоком 11 временной селекции и шестью измерительными каналами 19 1, ..., 19 6. Таким образом, контроль осуществляется одновременно по трем координатам при однократном предварительном позиционировании, чем и достигается повышение производительности контроля. 3 ил.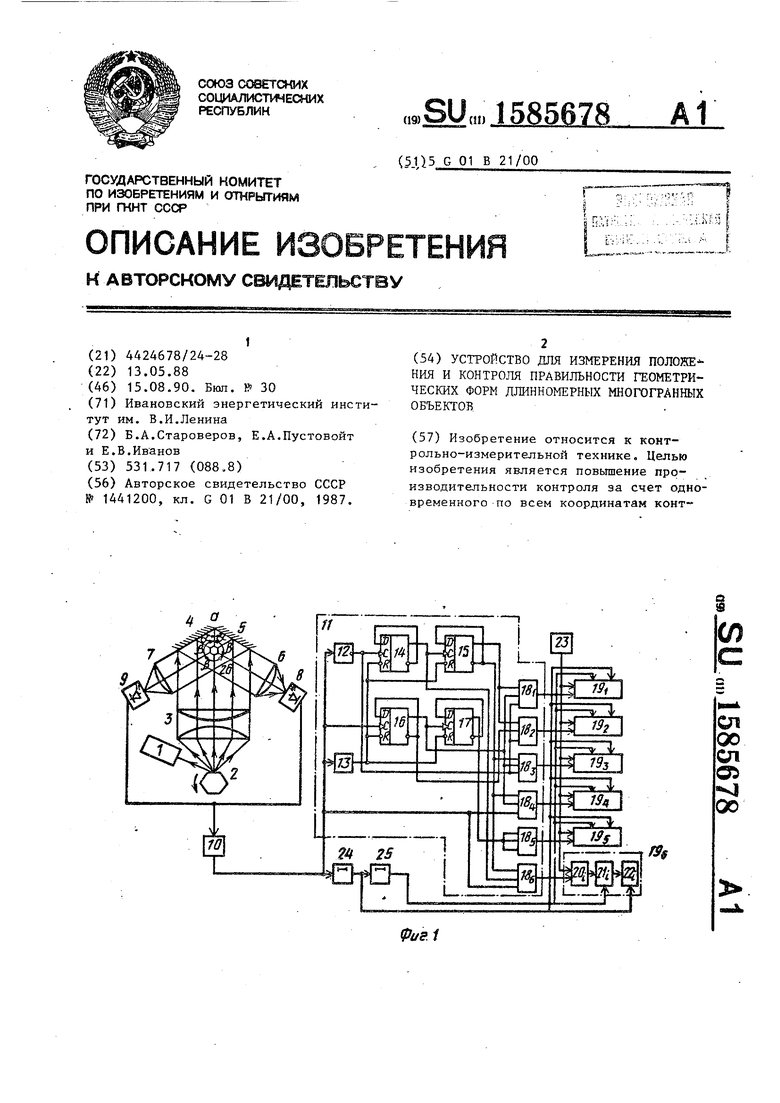
.5 ЙЛ.2
(t§
| Устройство для измерения положения и диаметра объекта | 1987 |
|
SU1441200A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
