11444863
Изобретение относится к тренажерм транспортных средств и может быть использовано в составе технических средств обучения и тренировки водителей.
Целью изобретения является повыщ.е- ние эффективности обучения.
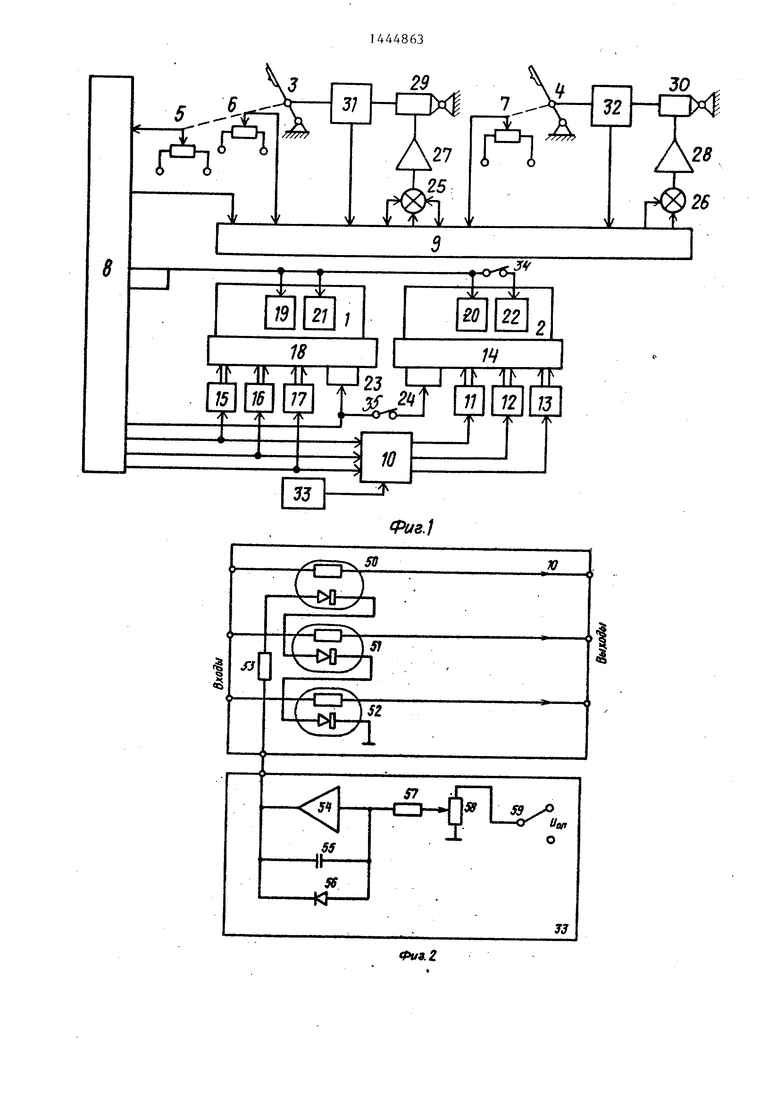
На фиг. 1 изображена функциональБлок 10 управления содержит оптро- ны 50-52 и резистор 53, а задатчик 33 усилитель 54, конденсатор 55, диод 56, резистор 57 и потенциометр 585 который через переключатель 59 соединен с источником опорного напряжения.
Предлагаемое устройство позволя
| название | год | авторы | номер документа |
|---|---|---|---|
| Тренажер профессиональной подготовки оператора гусеничной машины | 2022 |
|
RU2798765C1 |
| ИМИТАТОР АКСЕЛЕРАЦИОННЫХ ВОЗДЕЙСТВИЙ ДЛЯ АВИАЦИОННОГО ТРЕНАЖЕРА | 1988 |
|
RU1535223C |
| Тренажер сварщика | 1984 |
|
SU1374271A1 |
| Тренажер сварщика | 1988 |
|
SU1550571A1 |
| СПОСОБ ОБУЧЕНИЯ УПРАВЛЕНИЮ ТРАНСПОРТНЫМ СРЕДСТВОМ И ТРЕНАЖЕР | 1995 |
|
RU2131623C1 |
| Тренажер сварщика | 1984 |
|
SU1217151A1 |
| Тренажер для обучения сварщиков | 1986 |
|
SU1441446A1 |
| АВИАЦИОННЫЙ ТРЕНАЖЕР | 1989 |
|
RU1723915C |
| Тренажер для обучения вождению гусеничной машины | 2020 |
|
RU2750122C1 |
| Обучающее устройство | 1984 |
|
SU1249566A1 |
Изобретение относится к тренажерам транспортных средств и обеспечивает повьмение эффективности обучения. Тренажер транспортного средства содержит рабочие места обучаемого и обучающего со связанными между собой органами управления и датчиками их положения, выход датчика положения органа управления обучаемого подключен к входу блока моделирования динамики движения, сумматоры, выходы которых связаны с входами соответствующего блока исполнительных механизмов, при этом рабочие места обучаемого и обу- чающего расположены на платформах, снабженных приводами их перемещения, имитаторы визуальной обстановки, шума и вибрации. Тренажер содержит также блок управления приводом перемещения платформы, на которой расположено рабочее место обучаемого и за- датчик режима работы. Тренажер позволяет обучающему активно вмешиваться в процесс управления имитируемым транспортным средством, т.е. обучающий имеет возможность перехватить инициативу в управлении, переведя обучаемого в режим слежения за управлением. Кроме того, в предлагаемом устройстве обучающий может дозировать свои физические и психологические нагрузки за счет; остановки либо ввода в движение своей платформы (блок управления и блок управляемых регуляторов уровня сигнала) и перехвата, либо возврата инициативы в управлении обучаемому переключатель режима работы органа управления обучающего).;3 з.п, ф-лы, 3 ил. (Л li ф 4 СХ) О) со
ная блок-схема предлагаемого тренаже-.|g ет реализовать следующие основные
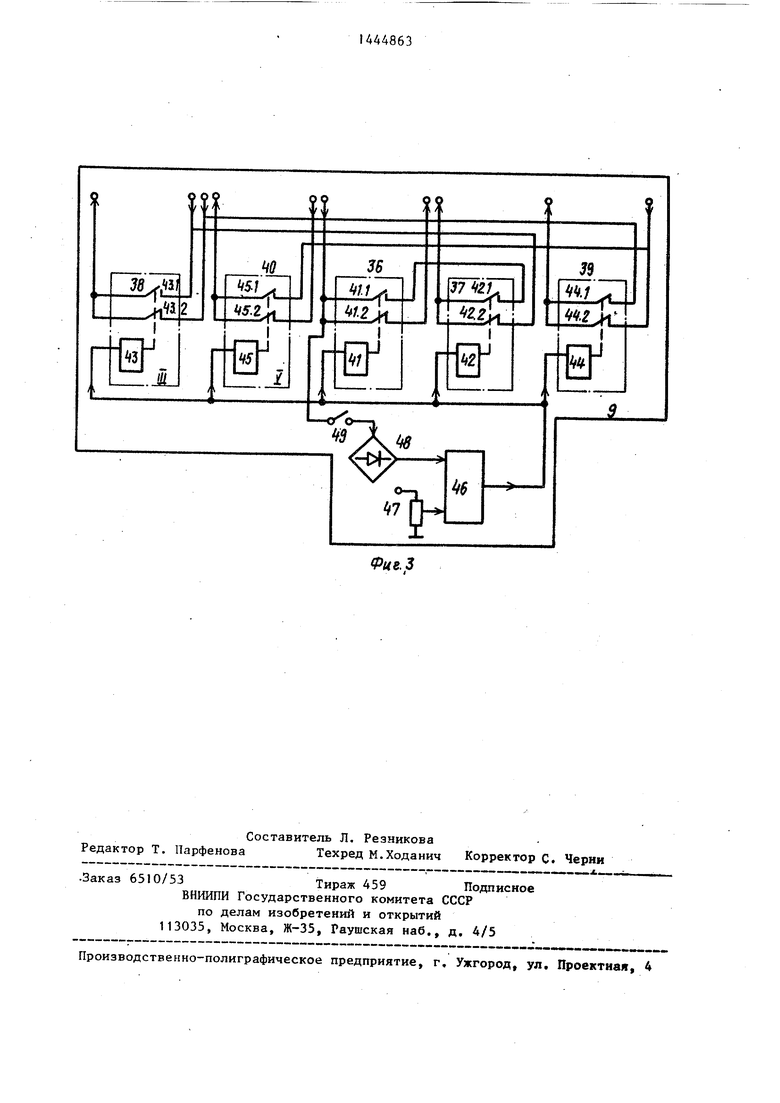
ра; на фиг. 2 - электрическая принципиальная схема блока управления приводами и задатчика режима работы; на. фиг. 3 - электрическая принципиальная схема переключателя режима работы органов управления.
Тренажер транспортного средства содержит рабочее место 1 обучаемого и рабочее место 2 обучающего с органами 3 и 4 управления и датчиками 5-7 их положения. Выходы датчиков 5 и 6 связаны с одним из входов блока 8 моделирования динамики движения, вькоды которого подключены соответственно к одному из входов переключателя 9 режима работы, к входам блока 10 управления приводами 11-13 перемещения платформы 14, на которой расположено рабочее место 2 обучающего, к входам приводов 15- 17 перемещения платформы IB, на которой расположено рабочее место 1 обучающегося, и к входам имитаторов 19 и 20 визуальной обстановки и имитаторов 21 и 22 шума и входам имитаторов 23 и 24 вибрации.
Устройство содержит сумматоры 25 и 26, одни входы которых соединены с выходами переключателя 9 режима ра- боты, а выходы через усилители 27 и .28 - с исполнительными механизмами 29 и 30, связанными с датчиками 31 и 32 усилий органов 3 и 4 управления. Тренажер содержит задатчик 33 режима работы и переключатели 34 и 35. Переключатель 9 режима работы выполнен на коммутаторах 36-40, коммутаторы содержат обмотку 41 с контактами 41.1 и 41.2,1 обмотку 42 с контактами 42.1 и 42,2 , обмотку 43 с контактами 43.1 и 43.2,Обмотку 44 с ; контактами 44.1 и 44.2 и обмотку 45 с контактами 45.1 и 45.2, все обмотки подключены к вькоду компаратора 46, входы которого соединены с выходами источника 47 опорного напряжения и выпрямителя 48, который связан входом через переключатель 49 с одним из входов переключателя 9.
режимы управления процессом обучен Режим, при котором обучающий ос ществляет контроль за процессом об чения. Он может отслеживать дейст15 ВИЯ обучаемого, управляющего имити руемым транспортным средством по п ложению органа 4 управления, а так может поправить ошибочные действия обучаемого, используя для этих це20 лей орган 4 управления. Отработка этого режима осуществляется при ус тановке переключателей 34, 35 и 49 положение Выключено, а переключателя 59 - в положение, обозначен
25 ное на фиг. 2 -HJon. При этом динамик имитатора 22.шума и привод им татора 24 вибрации отключены и обу чающий (в отличие от обучаемого) н получает информации по этим кана30 лам. На вход интегратора 54 зад чика 33 через входной резистор 57 потенциометр 58 и переключатель 59 подается опорное напряжение.
Напряжение на выходе усилителя 54 и задатчика 33 близко к нулю. Э напряжение поступает на вход блока 10 управления через-резистор 53, н светодиоды резисторных оптронов 50 52. Светодиоды не светятся, и фото сопротивления оптронов 50-52 наход ся в непроводящем состоянии. В ито сигналы управления с блока 8 модели вания динамики движения не поступа на входы приводов П-13, и платфор 14 обучающего неподвижна , т.е. об чающий не получает информацию по а целерационному каналу.
Установка переключателя 49 в по жение Выключено следующим образо соединяет органы 3 и 4 управления рез коммутаторы 36 и 40. Сигнал, с ответствующий положению органа 3 у равления, через датчик 5 положения поступает на вход блока 8 моделиро ния, а с его выхода поступает на п реключатель 9, на который поступаю также сигналы с выходов датчиков 6 и 7 положений органов управления с налы с одних выходов переключателя
35
50
55
режимы управления процессом обучения. Режим, при котором обучающий осуществляет контроль за процессом обучения. Он может отслеживать дейстВИЯ обучаемого, управляющего имитируемым транспортным средством по положению органа 4 управления, а также может поправить ошибочные действия обучаемого, используя для этих це0 лей орган 4 управления. Отработка этого режима осуществляется при установке переключателей 34, 35 и 49 в положение Выключено, а переключателя 59 - в положение, обозначен5 ное на фиг. 2 -HJon. При этом динамик имитатора 22.шума и привод имитатора 24 вибрации отключены и обучающий (в отличие от обучаемого) не получает информации по этим кана0 лам. На вход интегратора 54 задатчика 33 через входной резистор 57, потенциометр 58 и переключатель 59 подается опорное напряжение.
Напряжение на выходе усилителя 54 и задатчика 33 близко к нулю. Это напряжение поступает на вход блока 10 управления через-резистор 53, на светодиоды резисторных оптронов 50- 52. Светодиоды не светятся, и фотосопротивления оптронов 50-52 находятся в непроводящем состоянии. В итоге сигналы управления с блока 8 модели- вания динамики движения не поступают на входы приводов П-13, и платформа 14 обучающего неподвижна , т.е. обучающий не получает информацию по ак- целерационному каналу.
Установка переключателя 49 в положение Выключено следующим образом соединяет органы 3 и 4 управления через коммутаторы 36 и 40. Сигнал, соответствующий положению органа 3 управления, через датчик 5 положения поступает на вход блока 8 моделирования, а с его выхода поступает на переключатель 9, на который поступают также сигналы с выходов датчиков 6 и 7 положений органов управления сигналы с одних выходов переключателя 9
5
0
5
поступают на входы сумматора 26, и через усилитель 28 поступают на вход исполнительного механизма 30, нагружающего и устанавливающего положения органа 4 управления обучающего.Таким образом, орган 4 управления обучающего отслеживает положение органа 3 управления обучаемого, а обучающий в свою очередь имеет возможность вне- ю сения поправки по усилию через сумматор 25 на орган 3 управления обучаемого. Тренажер обеспечивает возможность активного вмешательства в процессе управления имитируемым транс- 15 портным средством с приоритетом по отношению к обучаемому за счет органа 4 управления и переключателя режима работы управления обучающего.
Отработка этого режима осуществля- 20 ется при установке перекотючателей 34, 35 и 49 в положение Включено, а переключателя 59 - в положение, обозначенное на фиг. 2 Uon. На вход интегратора 54 задатчика 33 через ре- 25 зистор 57, потенциометр 58 и переключатель 59 подается отрицательное опорное напряжение. Напряжение на вькоде интегратора 54 плавно нарастает (скорость нарастания напряжения и 30 его величина зависят от величины опорного напряжения, задаваемой резистором 57, потенциометром 58 и параметрами конденсатора 55 и диода 56). Поступая описан- 5 Hbw образом на входы диодов резис- торных оптронов 50-52, это напряжение плавно увеличивает их свечение, что приводит к плавному уменьшению значений сопротивлений фо горезисторов 40 оптронов 50-52 почти до нуля. В итоге сигналы управления блока 8 поступают на входы приводов 11-13, и платформа 14 обучающего с плавным нарастанием амплитуды начинает переме- 45 щаться синхронно с платформой 18 обучаемого.
Установка переключателя 49 в положение Включено при приложении обу- чакнцим определенного усилия к органу 50 4 управления следующим образом изменяет режим работы органов з Т1равления. Сигнал, соответствующий усилию обуча- кмцего, от датчика 32 усилия через
переключатель 49 и вьшрямнтельный о gg мост 48 поступает на первый вход компаратора 46. При достижении этим сигналом уровня, задаваемого на второй вход компаратора 46 задатчиком 47,
компаратор 46 срабатывает, и на его выходе появляется сигнал, поступающий на управляющие входы коммута- торов 36-40, что приводит к изменению состояния их нормально разомкнутых и нормально замкнутых контактов на противоположное. При этом выходы датчиков 31 и 32 усилий отсоединяются от входов сумматора 25, и на ег входы подаются сигналы от датчиков 6 и 7 положения органов управления через контакты 42.2 и 41.2 коммутаторо 37 и 36 соответственно. Сигнал от да чика 32 усилий через контакты 43.2 и 44.2 коммутаторов 38 и 39 посту- пает на вход сумматора 26, где суммируется р сигналом, поступающим с выхода блока 8 через контакт 45.2 коммутатора 40. В результате положение органа 3 управления обучаемого зависит только от сигнала, соответствующего перемещению органа управления обучающего, поступающего на сумматор 25 описанным образом, т.е. обучающий обладает приоритетом в управлении по отношению к обучаемому.
Перед отработкой очередной учебно задачи обучающий вводит в блок 8 мо делирования параметры внешних уело- ВИЙ (скорость и направление ветра,
;температуру наружного воздуха, загрузку, количество топлива и т.д.) и при помощи переключателей 24, 35, 59 и 49. выбирает необходимый по его мнению режим (алгоритм) управления процессом обучения.
В соответствии с полученным заданием обучаемьй, используя органы 3 управления, выбирает параметры движения имитируемого транспортного ;; ; средства, которые вводят в блок 8 моделирования с пульта управления. По введенным параметрам внешних условий и текущим параметрам управления имитируемым транспортным средством блок 8 вырабатьшает параметры движения транспортного средства в заданной обстановке и вьщает управляющие сигналы в различные устройства тренажера, в том числе на приводы 15-17 платформы 18.
Очевидно, что любое изменение обучаемым параметров движения находит свое отражение в характере перемещений приводов 15-17, в изменении режима работы имитаторов 20-24.
Если обучающий хочет исправить ошибочные действия обучаемого в
процессе управления, он начинает воздействовать на орган 4 управления, что вызывает, как сле ;ствие, изменение положения штока исполнительного механизма 29, которое отличаетс от положения заданного усилием обу чаемого, что вызывает движение орга- .на 3 управления обучаемого до выравнивания этих усилий.
Фо.рмула изобретения
I. Тренажер траспортного средства, содержащий рабочие места обучаемого и обучающего со связанными между собой органами управления и датчиками их положения, выход датчика положения органа управления обучаемого подключен к входу блока моделирования динамики движения,сумматоры, выходы которых связаны.с входами соответствующего блока исполнительных механизмов, при этом рабочее место обучаемого расположено на платформе, снабженной приводом ее перемещения, имитаторы визуальной обстановки шума и,вибрации, отличающийся тем, что, с целью повышения эффективности обучения, он снабжен переключателем режима работы, дополнительной платформой, приводом ее перемещения, блоком управления этим приводом и соединенным с одним из его входов за- датчиком режима работы, а рабочее место обучающего расположено на дополнительной платформе, причем другие входы блока управления приводом перемещения дополнительной платформы соединены с первым, вторым, третьим выходами блока моделирования динамики движения, связанными с входами привода перемещения основной платформы, а четвертый, пятый и шестой выходы блока моделирования динамики движения соединены с входами имитаторов визуальной обстановки, щума и вибрации, а седьмой - с первым входом переключателя режима работы, второй, третий, четвертый и пятый входы которого соединены с выходами соответствующих датчиков органов управления, а первый, второй, третий, чевертый и пятый - с входами соответствующих сумматоров.
5
0
5
5
0
5
0
5
первые вьшоды которых соединены с выходом компаратора, один вход которого подключен к выходу источника опорного напряжения, а другой через вьшрямитель и выключатель связан с пятым входом переключателя режимов, с которым связаны второй и третий вьюоды первого коммутатора, четвертый и пятый вьшоды которого соединены соответственно с третьим выходом переключателя режимов и вторым вьгаодом второго коммутатора, третий и четвертый вьгооды которого являются четвертым выходом переключателя режимов, а пятый является третьим входом переключателя режимов, связанным с вторым вьшодом третьего коммутатора, третий и четвертый выводы которого являются вторым выходом переключателя режимов, а пятый - первым входом переключателя, связанным с вторым выводом четвертого коммутатора, третий и четвертый вьшоды которого являются пятым выходом переключателя, а пятый вьшод связан с вторым входом переключателя режимов, связанным с вторым вьшодом пятого коммутатора, третий и четвертый вьшоды которого являются первым выходом переключателя, а пятый вьшод связан с четвертым входом переключателя режимов.
4, Тренажер по п. 1 , о т л и ч ю щ и и с я тем, что, блок управления приводом дополнительной платформы содержит три оптрона и второй резистор, один вьюод которого соединен с одним из входов блока управления, а другой - со светоизлучаю- щим диодом первего оптрона, соединенного последовательно со светоизлуча- ющими диодами второго и третьего оптронов, при этом второй вывод третьего светоизлучающего диода заземлен, резисторные входы оптронов являются другим входам блока управления, а резисторные выходы - выходами блока управления.
8 26
Фиг.1
Фке.З
| Устройство для единого одновременного обзора пространства полусферы с одного датчика изображения | 1961 |
|
SU148095A1 |
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
