Изобретение относится к тренажерам для подготовки водителей гусеничных машин.
Наиболее близким техническим решением к предлагаемому изобретению является тренажер для обучения вождению гусеничной машины (см. патент №2750122, бюл. №18 от 22 июня 2021 [1]), который принят в качестве прототипа).
Тренажер для обучения вождению гусеничной машины, который взят в качестве прототипа, содержит кабину с прибором наблюдения механика-водителя с индикаторами, органами управления и датчиками их положения, вертикальных ускорений и угловых скоростей, подключенных к первому входу блока моделирования динамики движения, другой вход которого связан с выходом блока имитации визуальной обстановки, второй выход которого соединен с первым входом пульта управления инструктора, второй вход которого соединен с первым выходом блока моделирования динамики движения, а выход - с переключателем выбора рельефа местности, один из выходов которого связан с другим входом приемника тахометра, а другой - с имитатором рельефа местности, и аппаратуру управления динамической платформой, блок имитации подвески машины, аналого-цифровой преобразователь, указатель тахометра, блок индикации и первый интегратор, первый и второй входы которого соответственно соединены с выходами блока моделирования динамики движения и логического элемента «И», а выход первого интегратора последовательно соединен с блоком имитации подвески машины, имеющим выход на аппаратуру управления динамической платформой кабины и со вторым входом регулятора, подключенного первым входом к кабине с органами управления и датчиками их положения, вертикальных ускорений и угловых скоростей, выход регулятора соединен с одним из входов логического элемента «И», другой вход которого соединен с логическим элементом «ИЛИ», последовательно подключенного к первому выходу задатчика, а выход логического элемента «ИЛИ» через блок моделирования динамики движения соединен со вторым входом первого имитатора рельефа местности, имеющего выход на индикаторы прибора наблюдения механика-водителя, размещенного в кабине.
Данный тренажер предназначен для обучения приемам пользования оборудованием и органами управления, находящимися на рабочем месте механика-водителя, формирования и поддержания навыков по подготовке машины к движению, а также для обучения вождению гусеничных машин в различных условиях «движения» в условиях учебного класса без расхода ресурса реальной машины. Однако конструкция этого тренажера не обеспечивает формирование всего комплекса навыков, необходимых для управления реальной машиной, и имеет ряд недостатков:
обучаемый не ощущает визуально результат неправильного действия по управлению машиной, что с психологической точки зрения весьма важно, потому что нарушение режима работы двигателя и неправильный выбор передач в конкретных дорожных условиях влекут за собой снижение средних скоростей движения машин, их поломки и аварии;
отсутствует реальное ощущение обучаемым правильного переключения передач потому, что даже при явно неверных его действиях визуальная картинка запрограммирована на правильное действие и производит на экране следствие правильных действий;
конструкция известного тренажера не учитывает зависимость коэффициента полезного действия гусеничного движения от скорости движения и от коэффициента сопротивления грунта, что снижает качество профессиональной подготовки обучаемых и способствует формированию навыков, не соответствующих вождению реальной гусеничной машины.
Так, коэффициент полезного действия (КПД) η гусеничного движителя при коэффициенте сопротивления грунта ƒс - 0,02 и скорости движения  η = 0,34, а при ƒc = 0,2 и
η = 0,34, а при ƒc = 0,2 и  η = 0,84, т.е. погрешность моделирования на различных режимах может быть более 50%.
η = 0,84, т.е. погрешность моделирования на различных режимах может быть более 50%.
Анализ практического вождения гусеничных машин показывает, что одним из главных факторов повышения средних скоростей движения машин у опытных водителей является использование в движении более высоких передач. Водители низкой квалификации, не имея достаточных навыков в оценке дорожных условий и выборе передач, зачастую осуществляют движение на низшей передаче в тех условиях, где возможно движение на более высокой передаче.
В таблице 1 приведены опытные данные по использованию передач водителями различной квалификации при движении гусеничных машин по одному и тому же маршруту.
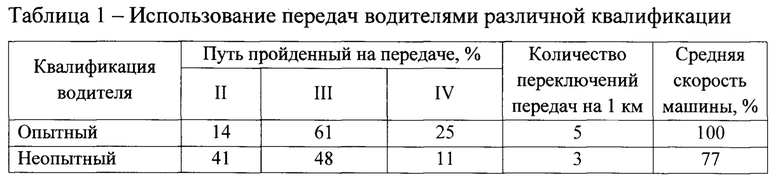
Из таблицы следует, что если опытный специалист в данных дорожных условиях использовал в основном третью и четвертую передачи (86% пути), то неопытный специалист двигался на второй и третьей передачах (89% пути) и показал среднюю скорость движения на 23% ниже, чем опытный.
А поскольку при обучении обучаемый - водитель не воспринимает воздействие данного фактора, то данный тренажер и не обеспечивает формирование навыков, необходимых для правильного выбора передачи исходя из условий движения. Известно, что передача, на которой может двигаться гусеничная машина в конкретных дорожных условиях, определяется величиной необходимой силы тяги по двигателю для преодоления внешних сопротивлений движению и возможностью по реализации по условиям сцепления гусениц с грунтом. Такое управление может осуществлять только водитель, хорошо чувствующий машину.
Для правильного выбора передачи, исходя из условий движения, важно уметь определить момент движения гусеничной машины без буксования гусениц. У многих обучаемых, прошедших подготовку на существующих тренажерах, это вызывает затруднение, поэтому для формирования этого навыка на реальных машинах в практике используют различные сигналы, подаваемые водителю, например, по средствам внутренней связи о начале перехода с одной передачи на другую. При получении сигнала обучаемый должен выполнять соответствующие приемы по управлению машиной. Количество повторений может быть десятки и даже сотни раз. Но главное, такой метод обучения лишает обучаемого самостоятельности. Поэтому этот метод должен быть отменен, как только обучаемый сам научится определять передачу, на которой может двигаться гусеничная машина в конкретных дорожных условиях.
Указанные недостатки не позволяют полностью реализовать высокие технические возможности, заложенные в современных гусеничных машинах, что обуславливает необходимость вести поиск более совершенных тренажеров профессиональной подготовки операторов.
Целью изобретения является повышение качества обучения вождению и точности оценки деятельности обучаемого за счет представления ему оперативной информации о результатах своих действий при имитации зависимости изменения коэффициента полезного действия гусеничного движителя от скорости движения и от коэффициента сопротивления грунта.
Поставленная цель достигается тем, что в известный тренажер для обучения вождению гусеничной машины дополнительно введен второй интегратор, подключенный входом к выходам первого интегратора и блока моделирования динамики движения, а выходом к первому входу второго логического элемента «И», другой вход которого соединен с выходом блока функциональной зависимости, выход второго логического элемента «И» соединен с первым входом имитатора сцепления гусениц с грунтом, второй вход которого непосредственно, а третий вход через второй инвертор соединены с выходом третьего логического элемента «И» сцепления, подключенного первым входом к другому выходу задатчика, последовательно подключенного третьим выходом с другим входом блока функциональной зависимости и первым входом четвертого логического элемента «И» сопротивления грунта, другие входы третьего и четвертого логических элементов «И» сцепления и сопротивления грунта соединены с выходом имитатора режима движения, вход которого с входом блока воспроизведения косинусной зависимости подключены к третьему выходу кабины с датчиками вертикальных ускорений и угловых скоростей, а выход четвертого логического элемента «И» сопротивления грунта через первый инвертор подключен к пятому входу блока моделирования динамики движения, выход которого подключен к первому входу третьего интегратора, другой вход которого подключен к выходу блока воспроизведения косинусной зависимости, а третий - к выходу имитатора сцепления гусениц с грунтом, выход третьего интегратора подключен к третьему входу регулятора, имеющего связь с блоком функциональной зависимости.
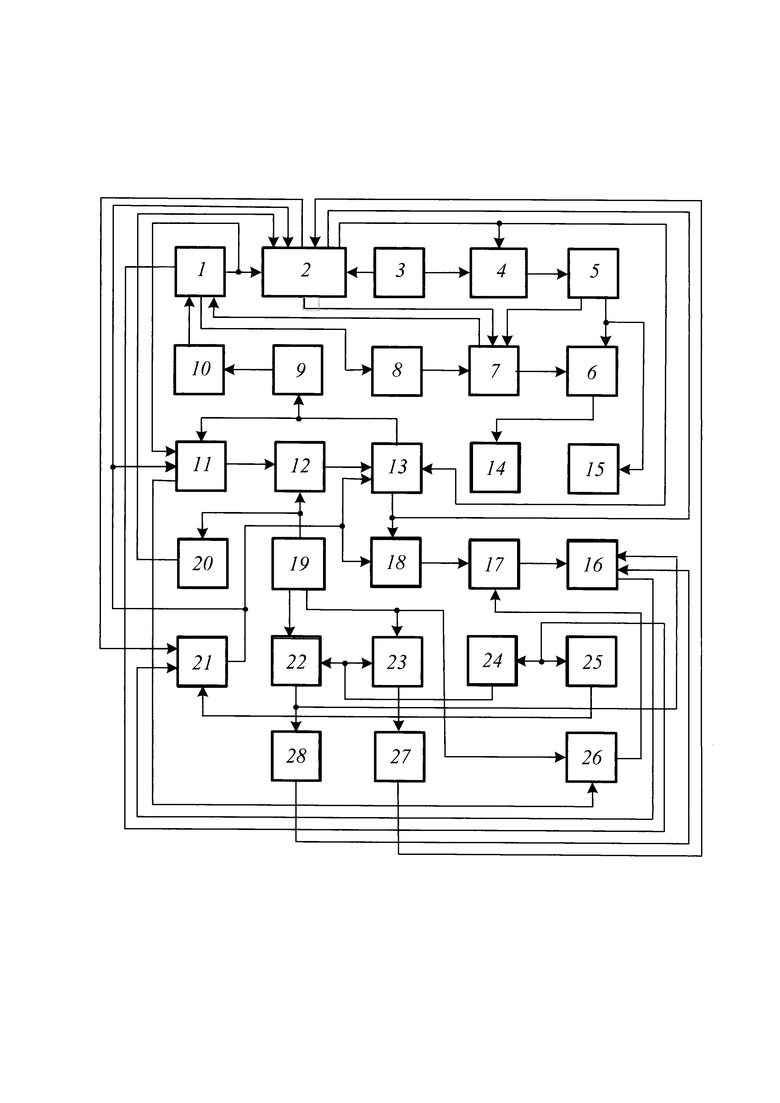
На фигуре показана функциональная схема предлагаемого тренажера профессиональной подготовки оператора гусеничной машины.
Тренажер профессиональной подготовки оператора гусеничной машины содержит кабину 1 с прибором наблюдения механика-водителя с индикаторами, органами управления и датчиками их положения, вертикальных ускорений и угловых скоростей, блок 2 моделирования динамики движения, блок 3 имитации визуальной обстановки, пульт 4 управления инструктора, переключатель 5 выбора рельефа местности приемник 6 тахометра, имитатор 7 рельефа местности, аналого-цифровой преобразователь 8, блок 9 имитации подвески машины, аппаратуру 10 управления динамической платформой кабины, регулятор 11, первый логический элемент «И» 12, первый интегратор 13, указатель 14 тахометра, блок 15 индикации, имитатор 16 сцепления гусениц с грунтом, второй логический элемент «И» 17, второй интегратор 18, задатчик 19, логический элемент «ИЛИ» 20, третий интегратор 21, третий и четвертый логические элементы «И» сцепления 22 и сопротивления грунта 23, имитатор 24 режима движения, блок 25 воспроизведения косинусной зависимости, блок 26 функциональной зависимости, первый 27 и второй 28 инверторы.
Кабина 1 с прибором наблюдения механика-водителя с индикаторами, органами управления и датчиками их положения, вертикальных ускорений и угловых скоростей, подключена к первому входу блока 2 моделирования динамики движения, другой вход которого связан с выходом блока 3 имитации визуальной обстановки, второй выход которого соединен с первым входом пульта 4 управления инструктора, второй вход которого соединен с первым выходом блока моделирования динамики движения, а выход - с переключателем 5 выбора рельефа местности, один из выходов которого связан с другим входом приемника 6 тахометра и блоком 15 индикации, а другой - с имитатором 7 рельефа местности.
Первый интегратор 13, первый и второй входы которого соответственно соединены с другими выходами блока моделирования динамики движения и первого логического элемента «И» 12, а выход первого интегратора последовательно соединен с блоком 9 имитации подвески машины, имеющим выход на аппаратуру 10 управления динамической платформой кабины 1 и со вторым инверсным входом регулятора 11, подключенного первым входом к кабине с органами управления и датчиками их положения, вертикальных ускорений и угловых скоростей.
Регулятор 11 соединен выходом с одним из входов первого логического элемента «И», другой вход которого соединен с логическим элементом «ИЛИ» 20, последовательно подключенного к первому выходу задатчика 19, а выход логического элемента «ИЛИ» через блок моделирования динамики движения соединен со вторым входом имитатора 7 рельефа местности, имеющего выход на индикаторы прибора наблюдения механика-водителя, размещенного в кабине.
Второй интегратор 18, подключенный входом к выходам первого интегратора и блока моделирования динамики движения, а выходом к первому входу второго логического элемента «И» 17, другой вход которого соединен с выходом блока 26 функциональной зависимости, выход второго логического элемента «И» соединен с первым входом имитатора 16 сцепления гусениц с грунтом, второй вход которого непосредственно, а третий вход через второй инвертор 28 соединены с выходом третьего логического элемента «И» 22 сцепления гусениц с грунтом, подключенного первым входом к другому выходу задатчика 19, последовательно подключенного третьим выходом с другим входом блока функциональной зависимости и первым входом четвертого логического элемента «И» 23 сопротивления грунта, другие входы третьего и четвертого логических элементов «И» сцепления и сопротивления грунта соединены с выходом имитатора 24 режима движения, вход которого с входом блока 25 воспроизведения косинусной зависимости подключены к третьему выходу кабины с датчиками вертикальных ускорений и угловых скоростей, а выход четвертого логического элемента «И» сопротивления грунта через первый инвертор 27 подключен к пятому входу блока моделирования динамики движения, выход которого подключен к первому входу третьего интегратора 21, другой вход которого подключен к выходу блока воспроизведения косинусной зависимости, а третий - к выходу имитатора сцепления гусениц с грунтом, выход третьего интегратора подключен к третьему входу регулятора, имеющего связь с одним из входов блока функциональной зависимости.
Тренажер работает следующим образом.
Инструктор с помощью пульта 4 управления и посредством переключателя 5 осуществляет выбор упражнения по вождению, содержащего естественные и искусственные препятствия. При этом на первый вход имитатора 7 подается с переключателя 5 сигнал, соответствующий высокому уровню логической «1», а в приборе наблюдения оператора, находящегося в кабине 1, появляется изображение обстановки в соответствии с условиями выполнения выбранного упражнения.
Обучаемый в соответствии с предъявленной визуальной обстановкой воздействует на органы управления движением гусеничной машины. Сигналы с датчиков органов управления поступают в блок 2 моделирования динамики движения. В соответствии с этими сигналами блок моделирования динамики движения управляет блоком 3 имитации визуальной обстановки, которую обучаемый наблюдают в приборе наблюдения.
Напряжение, пропорциональное оборотам коленчатого вала двигателя и крутящему моменту, приложенному к ведущему колесу, с блока 2 моделирования двигателя поступает на один из входов первого интегратора 13, на другой вход которого поступает напряжение, пропорциональное моменту сил сопротивления (трения), возникающему в гусеничном движителе, с выхода имитатора 16 сцепления гусениц с грунтом.
Напряжение, пропорциональное моменту сил сопротивления (трения), возникающему в гусеничном движителе, формируется с помощью второго интегратора 18, на один вход которого подается напряжение, пропорциональное скорости вращения ведущего колеса, с выхода первого интегратора 13 и напряжение, пропорциональное линейной скорости движения машины, с выхода третьего интегратора 21. В результате на выходе второго интегратора 18 формируется напряжение, пропорциональное моменту сил сопротивления (трения), возникающему в гусеничном движителе, Напряжение пропорциональное моменту сил сопротивления (трения), возникающему в гусеничном движителе, с помощью второго логического элемента «И» 17 умножается на напряжение, пропорциональное КПД гусеничного движителя, поданного на него с блока 26 функциональной зависимости.
С выхода второго логического элемента «И» 17 напряжение, пропорциональное моменту, приводящему в движение гусеничную машину, поступает на имитатор 16 сцепления гусениц с грунтом. На выходе этого имитатора формируется напряжение, пропорциональное моменту, который непосредственно приводит в движение всю массу машины.
Если напряжение пропорциональное моменту сил сопротивления (трения), возникающему в гусеничном движителе меньше напряжения, пропорционального сцеплению гусениц с грунтом (последнее подается на управляющие входы и определяет уровень ограничения), то напряжение пропорциональное моменту сил сопротивления (трения), возникающему в гусеничном движителе без изменения проходит в имитатор 16 сцепления гусениц с грунтом. Если же напряжение пропорциональное моменту сил сопротивления (трения), возникающему в гусеничном движителе больше (или равно) напряжения, пропорционального сцеплению гусеницы с грунтом, то напряжение пропорциональное моменту сил сопротивления (трения), возникающему в гусеничном движителе ограничивается имитатором 16 сцепления гусениц с грунтом до напряжения, поданного на управляющие входы, т.е. до величины напряжения, пропорционального сцеплению гусениц с грунтом.
Таким образом, на выходе имитатора 16 напряжение пропорциональное моменту сил сопротивления (трения), возникающему в гусеничном движителе равно напряжению, пропорциональному сцеплению гусениц с грунтом.
Это напряжение поступает на третий вход третьего интегратора 21, на другие входы которого поступает напряжение, пропорциональное моменту сил сопротивления (трения), возникающему в гусеничном движителе и напряжение, пропорциональное моменту сопротивления движению, определяемому сопротивлением грунта. Напряжение, пропорциональное моменту внешних сил, действующих на гусеничный движитель равно сумме напряжения, пропорционального моменту сопротивления грунта и напряжения, пропорционального углу наклона местности. В результате на выходе третьего интегратора 21 формируется напряжение, пропорциональное линейной скорости движения машины.
Напряжение, пропорциональное моменту сопротивления грунта формируется следующим образом. С датчика вертикальных ускорений и угловых скоростей, расположенного в кабине 1 тренажера, снимается напряжение, пропорциональное углу наклона местности, которое поступает на блок 25 имитирующий косинусную зависимость. Напряжение, пропорциональное косинусу угла наклона местности, поступает на вход четвертого логического элемента «И» 23, который решает функцию произведения коэффициента сопротивления грунта на косинус угла наклона местности с учетом произведения веса машины и радиуса ведущего колеса, На другой вход четвертого логического элемента «И» 23 подается напряжение, определяемое видом грунта с задатчика 19.
Таким образом, на выходе четвертого логического элемента «И» 23 напряжение пропорциональное моменту сопротивления движению и определяемое сопротивлением грунта, поступает в блок 2 моделирования динамики движения гусеничной машины с противоположным знаком за счет первого инвертора 27.
Обучаемый видит воздействие данных факторов и действует исходя из складывающихся конкретных условий движения - сопротивления движению грунта и угла наклона местности.
Напряжение, пропорциональное моменту сопротивления движению от сцепления гусениц с грунтом, формируется точно так же, как и напряжение, пропорциональное моменту сопротивления грунта, только в этом случае используется третий логический элемент «И» 22.
Напряжение, пропорциональное моменту сопротивления движению от сцепления гусениц с грунтом, подается на управляющие входы имитатора 16, с помощью которого имитируется сцепление гусеницы с грунтом с разными знаками. Для изменения знака служит второй инвертор 28.
Обучаемый воспринимает воздействие сопротивления движению машины от сцепления гусениц с грунтом и осуществляет выбор передачи исходя из условий движения и обеспечения движения гусеничной машины без буксования гусениц.
Напряжение, пропорциональное КПД гусеничного движителя, формируется с помощью блока 26 функциональной зависимости, реализующего зависимость снижения КПД гусеничного движителя с увеличением скорости движения гусеничной машины [2, 3]. На первый вход блока 26 функциональной зависимости поступает напряжение, пропорциональное линейной скорости движения гусеничной машины, и соответствующей постоянному значению коэффициента сопротивления грунта. Напряжение, пропорциональное сопротивлению грунта, подается на второй вход блока 26 функциональной зависимости с третьего выхода задатчика 19.
Таким образом, предлагаемый тренажер в отличие от известного позволяет учитывать влияние КПД на динамику гусеничной машины, причем сам КПД учитывается здесь как функция скорости и сопротивления движения. Все это повышает точность моделирования динамики движения гусеничной машины. Использование данного тренажера для профессиональной подготовки оператора гусеничной машины за счет повышения точности моделирования позволит сократить время обучения на реальных гусеничных машинах, что, в свою очередь, приведет к экономии моторесурса учебных машин, топлива и затрат на содержание учебных трасс.
Список использованных источников
1. Тренажер для обучения вождению гусеничной машины: патент №2750122. - М.: ФИПС, МПК G09B 9/04 бюл. №18 от 22 июня 2021 г. (прототип).
2. Забавников Н.А. Основы теории транспортных гусеничных машин. - М.: Машиностроение, 1975. - С.106.
3. Теория быстроходных гусеничных транспортно-тяговых машин. - М: 2018. - С. 4.
| название | год | авторы | номер документа |
|---|---|---|---|
| Тренажер для обучения вождению гусеничной машины | 2020 |
|
RU2750122C1 |
| Кинотренажер водителя гусеничной машины | 1987 |
|
SU1531707A1 |
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ ДВИЖЕНИЯ ГУСЕНИЧНОЙ МАШИНЫ | 2005 |
|
RU2297048C1 |
| Устройство для моделирования динамики движения гусеничной машины | 1980 |
|
SU972530A2 |
| Устройство для моделирования динамики движения гусеничной машины | 1980 |
|
SU907560A1 |
| ДИНАМИЧЕСКИЙ ТРЕНАЖЕР ВОЖДЕНИЯ ГУСЕНИЧНОЙ МАШИНЫ | 2009 |
|
RU2396604C1 |
| Устройство для моделирования динамикидВижЕНия гуСЕНичНОй МАшиНы | 1979 |
|
SU851426A1 |
| ДИНАМИЧЕСКИЙ ТРЕНАЖЕР ВОЖДЕНИЯ ГУСЕНИЧНОЙ МАШИНЫ | 2009 |
|
RU2410756C1 |
| Устройство для моделирования динамики движения гусеничной машины | 1979 |
|
SU883929A1 |
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ ДВИЖЕНИЯ ГУСЕНИЧНОЙ МАШИНЫ | 1999 |
|
RU2165646C1 |
Изобретение относится к тренажерам профессиональной подготовки оператора гусеничной машины. Тренажер содержит кабину с прибором наблюдения механика-водителя с индикаторами, органами управления и датчиками их положения, вертикальных ускорений и угловых скоростей. Инструктор с помощью пульта управления осуществляет выбор упражнения по вождению и посредством переключателя - выбор рельефа местности полигона, содержащего естественные и искусственные препятствия. При этом на имитатор рельефа местности подается с переключателя сигнал. Дополнительно в тренажер введен второй интегратор, подключенный входом к выходам первого интегратора и блока моделирования динамики движения, а выходом к первому входу второго логического элемента «И», другой вход которого соединен с выходом блока функциональной зависимости, выход второго логического элемента «И» соединен с первым входом имитатора сцепления гусениц с грунтом, второй вход которого непосредственно, а третий вход через второй инвертор соединены с выходом третьего логического элемента «И» сцепления, подключенного первым входом к другому выходу задатчика, последовательно подключенного третьим выходом с другим входом блока функциональной зависимости и первым входом четвертого логического элемента «И» сопротивления грунта, другие входы третьего и четвертого логических элементов «И» сцепления и сопротивления грунта соединены с выходом имитатора режима движения, вход которого с входом блока воспроизведения косинусной зависимости подключены к третьему выходу кабины с датчиками вертикальных ускорений и угловых скоростей, а выход четвертого логического элемента «И» сопротивления грунта через первый инвертор подключен к пятому входу блока моделирования динамики движения, выход которого подключен к первому входу третьего интегратора, другой вход которого подключен к выходу блока воспроизведения косинусной зависимости, а третий - к выходу имитатора сцепления гусениц с грунтом, выход третьего интегратора подключен к третьему входу регулятора, имеющего связь с блоком функциональной зависимости. Результаты своих действий оператор видит на индикаторах прибора наблюдения механика-водителя, размещенного в кабине. Повышается уровень подготовки. 1 ил., 1 табл.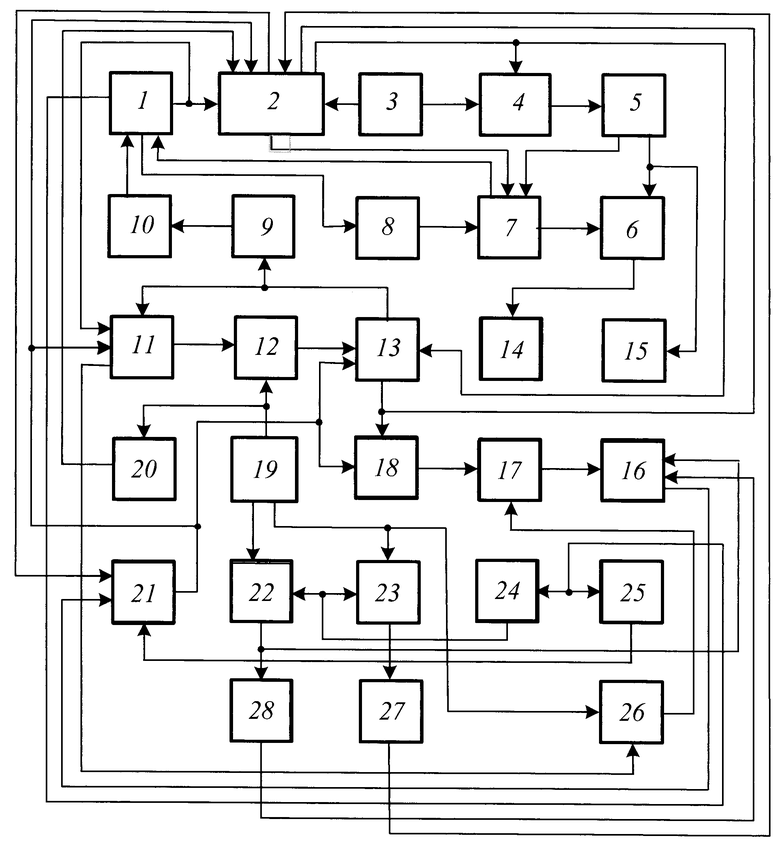
Тренажер профессиональной подготовки оператора гусеничной машины, содержащий кабину с прибором наблюдения механика-водителя с индикаторами, органами управления и датчиками их положения, вертикальных ускорений и угловых скоростей, подключенных к первому входу блока моделирования динамики движения, другой вход которого связан с выходом блока имитации визуальной обстановки, второй выход которого соединен с первым входом пульта управления инструктора, второй вход которого соединен с первым выходом блока моделирования динамики движения, а выход - с переключателем выбора рельефа местности, один из выходов которого связан с другим входом приемника тахометра, а другой - с имитатором рельефа местности, и аппаратуру управления динамической платформой, блок имитации подвески машины, аналого-цифровой преобразователь, указатель тахометра, блок индикации и первый интегратор, первый и второй входы которого соответственно соединены с выходами блока моделирования динамики движения и логического элемента «И», а выход первого интегратора последовательно соединен с блоком имитации подвески машины, имеющим выход на аппаратуру управления динамической платформой кабины и со вторым инверсным входом регулятора, подключенного первым входом к кабине с органами управления и датчиками их положения, вертикальных ускорений и угловых скоростей, выход регулятора соединен с одним из входов логического элемента «И», другой вход которого соединен с логическим элементом «ИЛИ», последовательно подключенного к первому выходу задатчика, а выход логического элемента «ИЛИ» через блок моделирования динамики движения соединен со вторым входом первого имитатора рельефа местности, имеющего выход на индикаторы прибора наблюдения механика-водителя, размещенного в кабине, отличающийся тем, что в него дополнительно введен второй интегратор, подключенный входом к выходам первого интегратора и блока моделирования динамики движения, а выходом к первому входу второго логического элемента «И», другой вход которого соединен с выходом блока функциональной зависимости, выход второго логического элемента «И» соединен с первым входом имитатора сцепления гусениц с грунтом, второй вход которого непосредственно, а третий вход через второй инвертор соединены с выходом третьего логического элемента «И» сцепления, подключенного первым входом к другому выходу задатчика, последовательно подключенного третьим выходом с другим входом блока функциональной зависимости и первым входом четвертого логического элемента «И» сопротивления грунта, другие входы третьего и четвертого логических элементов «И» сцепления и сопротивления грунта соединены с выходом имитатора режима движения, вход которого с входом блока воспроизведения косинусной зависимости подключены к третьему выходу кабины с датчиками вертикальных ускорений и угловых скоростей, а выход четвертого логического элемента «И» сопротивления грунта через первый инвертор подключен к пятому входу блока моделирования динамики движения, выход которого подключен к первому входу третьего интегратора, другой вход которого подключен к выходу блока воспроизведения косинусной зависимости, а третий - к выходу имитатора сцепления гусениц с грунтом, выход третьего интегратора подключен к третьему входу регулятора, имеющего связь с блоком функциональной зависимости.
| Тренажер для обучения вождению гусеничной машины | 2020 |
|
RU2750122C1 |
| ТРЕНАЖЕР ДЛЯ ПОДГОТОВКИ МЕХАНИКОВ-ВОДИТЕЛЕЙ ПОДВИЖНЫХ КОМПЛЕКСОВ ВООРУЖЕНИЯ | 2019 |
|
RU2711047C1 |
| 0 |
|
SU174171A1 | |
| Устройство для передачи давления на рабочий орган | 1926 |
|
SU38987A1 |
| US 9470967 B1, 18.10.2016. | |||
