-чЗ
00
ч
СП
Изобретение относится к автоматике и вычислительной технике и может быть использовано при разработке устройств отображения координатной информации для автоматизированных систем управления и систем автоматичес кого проектирования,
Цель изобретения - расширение области применения устройства путем вычисления координат отображаемых объе тов путем рекуррентного изменения ракурса наблюдения в трехмерном пространстве,
На чертеже представлена функцио нальная схема устройства.
Устройство содержит управляющий I и информационный 2 входы (первая и вторая входные информационные магистрали), выход 3 (выходная информационная магистраль), а также со второго по пятый блоки 4-7 памяти, первый блок 8 памяти, три синусно- косинусных преобразователя 9, 10 и 11J десять блоков 12-21 элементов И, два блока 22 и 23 элементов ИЛИ, три элемента ИЛИ 24,25,26, элементы И 27 и 28, генераторы 29 и 30 тактовых импульсов, триггер 31, регистры 32 и 33, умножитель 34, счетчик 35, дешифратор 36, элемент 37 задержки.
Блоки 4-8 памяти предназначены для упорядоченного хранения элементов матрицы размером 4x4 В исходном состоянии в блоках памяти хранятся единичные матрицы.
Устройство работает следующим образом,
В исходном состоянии в блоках 4-7 памяти хранятся элементы единичных матриц, в блоке 8 памяти и на выходе регистра 32 хранятся значения элементов результирующей матрицы преобразования, полученные в предшествптощем цикле изменения ракурса наблюдения (перед первым изменением ракурса - элементы единичной матрицы). Триггер 31 находится в нулевом состоянии, и единичный сигнал с его янверсного выхода разрешает прохождени е информа ции о текущих координатах (х) отображаемых объектов через блок 23 элементов ИЛИ на первый вход умножителя 34. Выход регистра 32 через блок 22 элементов ИЛИ подключен к второму входу умножителя 34, Сигналом с инверсного выхода триггера 31 разрешается прохождение информации с выхода генератора 30 через элементы
И 28, ИЛИ 26 на управляющий вход выбора режима работы умножителя 34, Тем самым определяется периодичность
выпотнения операции умножения вектора X на результирующую матрицу Sp, Частота следования сигналов с выхода генератора 30 должна быть согласована с частотой поступления информации о текущих координатах X, Результат перемножения Х Sp через блок 21 элементов И поступает в регистр 33, соединенный с выходной магистралью 3 устройства. Выходная магистраль может быть соединена, например, с устройством визуализации данных (не показано).
При изменении параметров ракурса наблюдения по магистрали 1 на вход
устройства поступает импульс сопровождения информации (ИСИ), вектор значений сдвигов D (dj, dy, 2) по соответствующим осям координат, вектор углов поворота (, зf(, dy}
вокруг соответствующих осей координат. Указанные данные могут поступать, например, от пульта ввода информации рабочего места оператора АСУ (не показан),
ИСИ поступает на вход триггера 31 и устанавливает его в единичное состояние. Тем самым разрешается прохождение информации через блок I2 элементов И, элемент И 27, обнуляется регистр 32 и запрещается прохождение информации через блоки 19 и 21 элементов И, а также элемент И 28. Устройство переводится в режим вычисления нового значения результиРУющей матрицы преобразования текущей информации S р,
Информация о величинах сдвига изображения d у, d, d поступает 1через блок 12 элементов И на йнформационный вход блока 4 памяти. Значения djfs iys 2 записываются в соответствующие ячейки (регистры) блока 4 таким образом, что в нем формируется матрица вида
Информация с ot-it , у через блок 12 элементов И поступает соответственно на первые входы синуснокосинусных преобразователей 9, 10 и 11. На выходе кадцого преобразователя формируются значения функций sin и cos соответствующего аргумента. Полученные значения поступают на информационные входы соответствующих блоков 5, 6 и 7 памяти, в которых формируются следующие матрицы соответственно:
С выхода генератора 29 тактовая частота поступает через элемент И 27 на счетный вход счетчика 35, На выходах дешифратора 36 в зависимости от состояния счетчика 35 формируются единичные сигналы, управляющие работой устройства в режиме вычисления значения результирующей матрицы преобразования Sp.
При поступлении первого тактового импульса в счетчик 35 на первом выходе дещифратора 36 формируется единичный сигнал. По этому сигналу через элементы ИЛИ 24 и 25 производится считьгаание информации из блока 8 и прохождение считанной информации через блок 17 элементов И, а также блок 23 элементов ИЛИ на выход .умножителя 34 в качестве первого
Аналогично устройство работает и при поступлении третьего и четвертого импульсов с генератора 29, В результате вьтолнения заданной после25 довательности операций в блоке 8 памяти формируется результирующая матрица (Sp), полученная последовательным перемножением матриц.(( (((S х X AJ, ) - А 2) А ) А.,).
40 При поступлении пятого импульса генератора 29 единичный управляющий сигнал формируется на пятом выходе дешифратора 36. По этому сигналу производится стирание информации и фор45 мирование единичных матриц в блоках 4-7 памяти, обнуление триггера 31 (тем самым запрещается прохождение импульсов с генератора 29 и входной информации через блок 12 элеменоперанда. Этим же сигналом дешифрато- gQ тов И), считывание содержимого блока
ра производится считывание содержимого блока 4, которое через блок 13 элементов И, блок 22 элементов ИЛИ поступает на вход умножителя 34 в качестве второго операнда.
Умножитель 34 осуществляет умножение поступивших на его входы опе8 памяти и прохождение считанной информации через блок 18 элементов И в регистр 32 и далее через блок 22 элементов ИЛИ на вход умножителя 34 55 в качестве второго операнда.
Сигнал с инверсного выхода триггера 31 разрешает прохождение входной
рандов (матриц R р и А-) по сигналу информации (х) о текущих координатах
управления, в качестве которого высотображаемых объектов через блок 19
тупает единичный сигнал с первого выхода дешифратора 36, Сигнал управления поступает через элемента ИЛИ 24 и 26 на управляющий вход умножителя 34, Этим же сигналом через элемент 27 задержки разрешается прохождение результата перемножения (SP А с выхода умножителя 34 через блок 20 элементов И в блок 8,
При поступлении второго импульса генератора 29 в счетчик записывается двойка и управляющий единичный сигнал формируется на втором выходе
дешифратора 36. По этому сигналу через элемент И 27 разрешается считьша- ние информации из блока 8 памяти и прохождение считанной информации через блок 17 элементов И, блок 23 элементов ИЛИ на вход умножителя 34 в качестве первого операнда. Этим же сигналом дешифратора производится считывание содержимого блока 5 памяти, которое через блок 14 элементов
И, блок 22 элементов ИЛИ поступает на вход умноткителя 34 в качестве второго операнда. Умножитель 34 осуществляет перемножение матриц (S А-) и результат перемножения
(S ) поступает в блок 8 памяти.
Аналогично устройство работает и при поступлении третьего и четвертого импульсов с генератора 29, В результате вьтолнения заданной последовательности операций в блоке 8 памяти формируется результирующая матрица (Sp), полученная последовательным перемножением матриц.(( (((S х X AJ, ) - А 2) А ) А.,).
При поступлении пятого импульса генератора 29 единичный управляющий сигнал формируется на пятом выходе дешифратора 36. По этому сигналу производится стирание информации и формирование единичных матриц в блоках 4-7 памяти, обнуление триггера 31 (тем самым запрещается прохождение импульсов с генератора 29 и входной информации через блок 12 элемен8 памяти и прохождение считанной информации через блок 18 элементов И в регистр 32 и далее через блок 22 элементов ИЛИ на вход умножителя 34 55 в качестве второго операнда.
Сигнал с инверсного выхода триггера 31 разрешает прохождение входной
отображаемых объектов через блок 19
5
элементов И, блок 23 элементов Ш1И на вход умножителя 34 в качестве первого операнда. Одновременно этим же сигналом триггера разрешается прохождение тактовой частоты с генератора 30 через элементы И 28, ИЛИ 26 на управляющий вход умножителя 34, Кроме того, разрешается выдача результата перемножения вектора текущих координат (i) на результирующую матрицу преобразования (Sl) через блок 21 элементов И на выходной регистр 33, выход которого является выходом устройства.
Таким образом, устройство в режиме преобразования те :у1цих координат (х) осуществляет их преобразование в соответствии с параметрами, зада- ваемь ми результирующей матрицей преобразования Sp, При переводе устройства в режим изменения параметров преобразования (йрием новых значений D, вГ и формирование новой S р), текущие координаты отображаемых объектов игнорируются на время вычислейия новой результирующей матрицы преобразования; Следует отметить, что при peaЛивадии устройства в виде спецйычис- лителя на быстродействующих элементах время вычисления новой результирующей матрицы невелико и не приводит к существенным искажениям инфор™ мации отображения.
Предлагаемое устройство обладает более широкими возможностями, так как позволяет осуществлять преобра- зования сдвигов и поворотов отображаемых объектов в трехмерном пространстве. При этом за счет накопления преобразований обеспечивается рекуррентное формирование ракурса наб- людейия при его изменениях, что позволяет добиться ощущения динамичного изменения точки наблюдения и сканирования линии визирования. Применение изобретения позволяет облегчит ориентировку оператора за счет того, что отпадает необходимость запоминания положения объектов в исходной системе координат.
Быстрота и качество анализа отоб ражаемой информации существенно зависят от ракурса, под которым рассматривается объект (процесс). При этом в каждом конкретном случае можно подобрать свой наилучший ракурс наблюдения, который у разных оператбров может быть разным, Устрой14
875
ство позволяет обеспечить наиболее реальта 1й процесс взаимного движения наблюдателя и отображаемых объектов за счет того, что параметры новрго ракурса наблюдения (координаты точки наблюдйния и направление линии визирования) задаются относительно предшествующего.
10
ормула изобретения
Устройство для вычисления координат отображаемых объектов, содержащее первый блок памяти, синусно-ко- синусные преобразователи и умноязд- тель, отличающееся тем, что, с целью расширения области применения устройства путем вычисления координат отображаемых объектов с учетом рекуррентного изменения ракурса наблюдения в трехмерном пространстве, оно содержит первый и второй генераторы тактовой частоты, с второго по пятый блоки памяти, десять блоков элементов И, дептфратор, счетчик, триггер, два элемента И, три элемента ИЛИ, элемент задержки, два блока элементов ИЖ и первый и второй регистры, первый вход первого блока элементов И и установочный вход триггера являются управляющим входом устройства, выход первого блока элементов И соединен с инфор- мационным входом второго блока памя
ти И входами синусно-косинусных преобразователей, выхода которых подключены к информационным входам соответственно третьего, четвертого и пятого блоков памятк, выход первого генератора тактовой частоты соединен с первым входом первого элемента И, второй вход которого и второй вход itepBoro блока элементов И подключены к прямому выходу триггера, сседи-т ненному с входом сброса первого регистра, выход первого элемента И сое- диней со счетным входом счетчика выход которого подключен к входу дешифратора, первый, второй, третий и четвертьй выходы которого соединены с адресными входами соответственно второго, третьего, четвертого и пятого блоков памяти, первыми входами
соответственно второго, третьего,чет- вертого и пятого блоков элементов И и входами первого элемента ИЛИ, выходы с второго по пятый блоков . элемен тов И и выход первого регистра под7 1
ключены к входам первого блока элементов ИЛИ, выход которого соединен с первым информационным входом умножителя, второй информационный вход которого соединен с выходом второго блока элементов ИЛИ, выход первого элемента ИЛИ соединен с первыми входами шестого блока элементов И, второго и третьего элементов ИЛИ, второй вход третьего элемента ИЛИ соеди нен с выходом второго элемента И, а выход - с управляющим входом умножителя, пятый выход дешифратора соединен с управляющими входами с второго по пятый блоков памяти, входами сброса счетчика и триггера, вторым входом второго элемента ИЛИ и первым входом седьмого блока элементов И, второй вход которого подключен к выходу первого блока памяти, соединенному с вторым входом шестого блока элементов И, выход которого соединен с первым входом второго блока элементов ИЛИ, второй вход которого под
448758
ключей к выходу восьмого блока элементов И, первый вход которого является информационным входом устройства, выход умножителя подключен к первым входам девятого и десятого блоков элементов И, вторые входы которых соединены соответственно через элемент эадержки с выходом первого
10 элемента ИЛИ и инверсным выходом триггера, подключенным к второму входу восьмого блока элементов И, выход второго -элемента ИЛИ соединен с управляющим входом первого блока
15 памяти, информационный вход которого соединен с выходом девятого блока элементов И, выход десятого блока элементов И подключен к входу второго регистра, выход которого являет20 ся выходом устройства, первый вход второго элемента И соединен с дом второго генератора тактовой частоты, а второй вход - с инверсным выходом триггера. 25

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для вычисления координат отображаемых объектов | 1990 |
|
SU1751805A1 |
| Устройство для отображения информации на экране электронно-лучевой трубки | 1986 |
|
SU1357996A1 |
| Устройство для формирования информации на телевизионном индикаторе | 1981 |
|
SU1075298A1 |
| Устройство для формирования изображения | 1987 |
|
SU1474633A1 |
| Устройство для сигнализации с индикацией местоположения аварийного объекта | 1982 |
|
SU1121689A1 |
| Устройство трансляции | 1986 |
|
SU1390629A1 |
| Устройство для формирования изображения | 1987 |
|
SU1462289A1 |
| Устройство для преобразования изображений | 1988 |
|
SU1578841A1 |
| Устройство для обработки данных при формировании диаграммы направленности антенной решетки | 1987 |
|
SU1462351A1 |
| Тренажер операторов систем управления | 1980 |
|
SU968840A1 |
Изобретение относится к автоматике и вычислительной технике и может быть испольяовано при разработке устройств отображения координатной днфоцшации для автоматизированных Систем управления и систем автоматического проектирования. Цель изобретения - расширение области применения устройства путем вычисления координат отображае1«)ГХ объектов с учетом рекзфрентного изменения р««сурса наблюдения в трехмерном пространстве. которая достигается введением блоков i 4-7 памяти, блоков 12-21 элементов И, блоков 22-23 «Элементов ИЛИ, элементов ИЛИ 24-26, элементов И 27 и 28, генераторов 29 и 30 тактовой частоты, триггера 31, регистров 32 и 33, счетчика 35, дешифратора 36 и соответствующих функциональных связей. Преобразование информации о текущих координатах отображаемых объектов осуществляется в соответствии с параметрами, задаваемыми оператором АСУ. К числу таких параметров относятся сдвиги информации об отображаемых объектах и их повороты в трехмерном пространстве. Эти параметры задают ракурс наблюдения отображаемого процесса (объекта). За счет накопления преобразований (сдвигов и поворотов) устройство ; обеспечивает рекуррентное формирование ракурса наблюдения при егр изменениях, что позволяет добиться ощущения динамичного изменения точки наблюдения и сканирова-f ния линии визирования. 1 ил. О)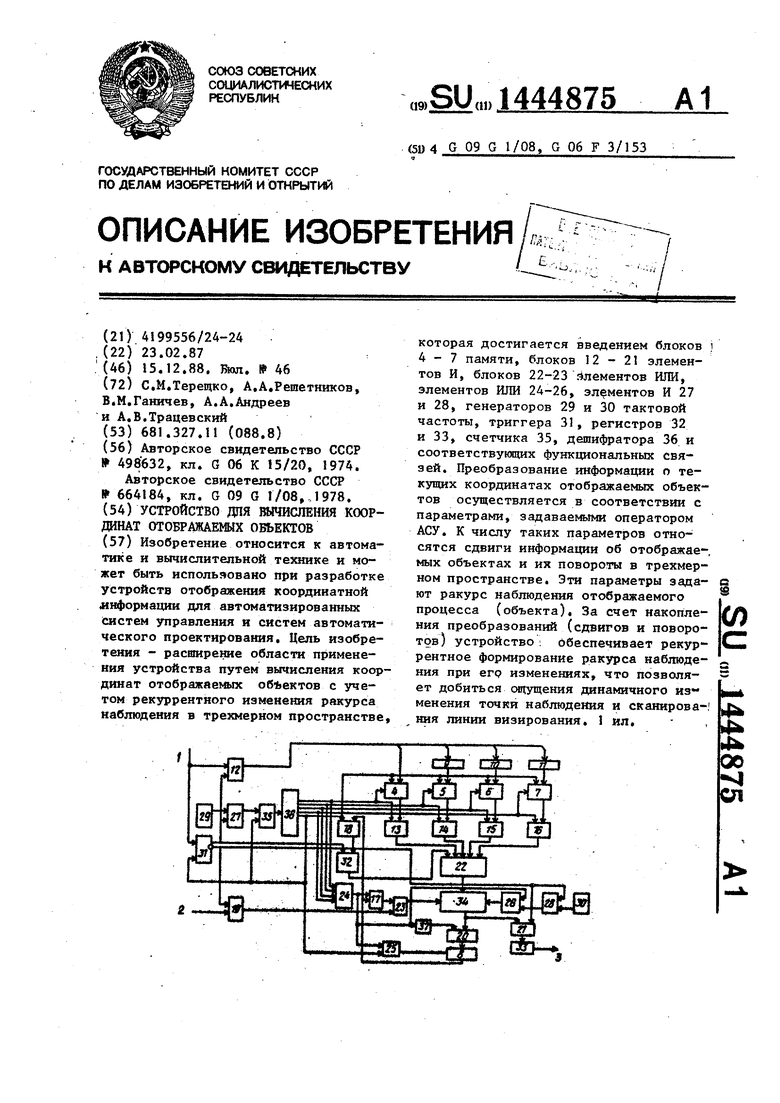

| Авторское свидетельство СССР 4981632, кл | |||
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Устройство для отображения информации на экране электроннолучевой трубки | 1978 |
|
SU664184A1 |
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
