ю
Фие.З
144632
телам (КД) верхнего элемента (ВЭ) и стопором положения КД. Последний размещен в фигурной выемке, выполненной в башмаке 7 распорного механизма. Стопор установлен в корпусе бапмака 7 и выполнен в ви,це подпружиненного штока 12, взаимодействующего с КД. Скобу 16 ВЭ при возведении крепи вставляют в прорезь на башмаке 7.Затем ВЭ перемещают до контакта его торца с башмаком 7. Скоба 16 перемещает курок 9 КД. После занятия скобой 16 крайнего нижнего положения курок 9 возвращается назад. При транспортировке по наклонной лаве скоба 16 упирается в курок 9. В результате предотвращается проскальзьгеание ВЭ крепи в сторону падения пласта. 4 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для дистанционного возведения клиновой крепи | 1986 |
|
SU1408079A2 |
| Устройство для дистанционного возведения клиновой крепи | 1981 |
|
SU994752A2 |
| РЕВОЛЬВЕР | 1996 |
|
RU2100742C1 |
| АГРЕГАТ ДЛЯ ВЫЕМКИ МОЩНЫХ КРУТОПАДАЮЩИХ ПЛАСТОВ | 1991 |
|
RU2037049C1 |
| Устройство для возведения крепи в очистном забое | 1980 |
|
SU947435A1 |
| Закладочное устройство | 1981 |
|
SU976089A1 |
| Устройство для дистанционного возведения клиновой крепи | 1980 |
|
SU883476A1 |
| ПИСТОЛЕТ "ИВАН" | 1993 |
|
RU2074353C1 |
| МНОГОЗАРЯДНЫЙ ГАЗОБАЛЛОННЫЙ РЕВОЛЬВЕР | 1998 |
|
RU2137082C1 |
| УДАРНО-СПУСКОВОЙ МЕХАНИЗМ | 1993 |
|
RU2082931C1 |
Изобретение относится к горно- добьшающей пром-сти и позволяет повысить надежность работы устр-ва при возведении клиновой крепи, имекнцей скобу 16 на торце верхнего элемента (ВЭ), в условиях работы на пластах с углами падения свшпе З5 с. Для этого устр-во снабжено курковьми держа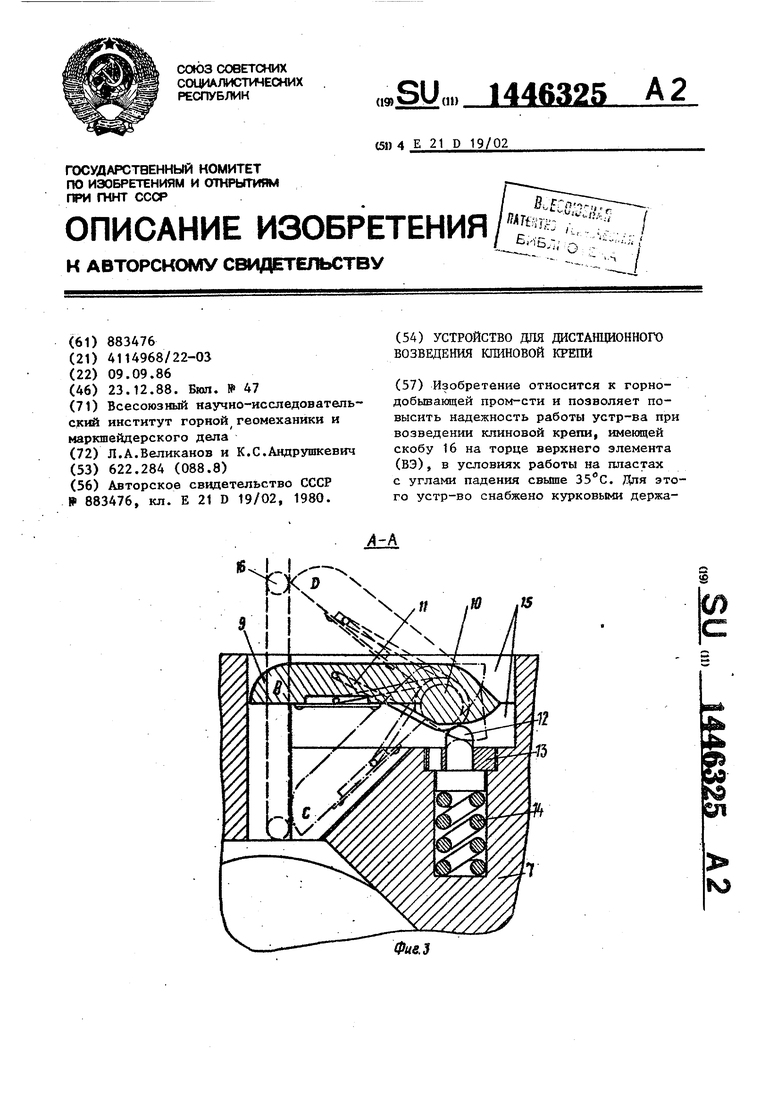
Изобретение относится к горно- добьтающей промышленности, в частности к устройствам для дистанционного возведения клиновой крепи, и являет- ся усовершенствованием изобретения по авт.св. № 883476.
Цель изобретения - повьвввние надежности работы устройства при возведении клиновой крепи, имекядей ско- бу на торце верхнего элемента, в условиях работы на пластах с углами падения свьш1е 35.
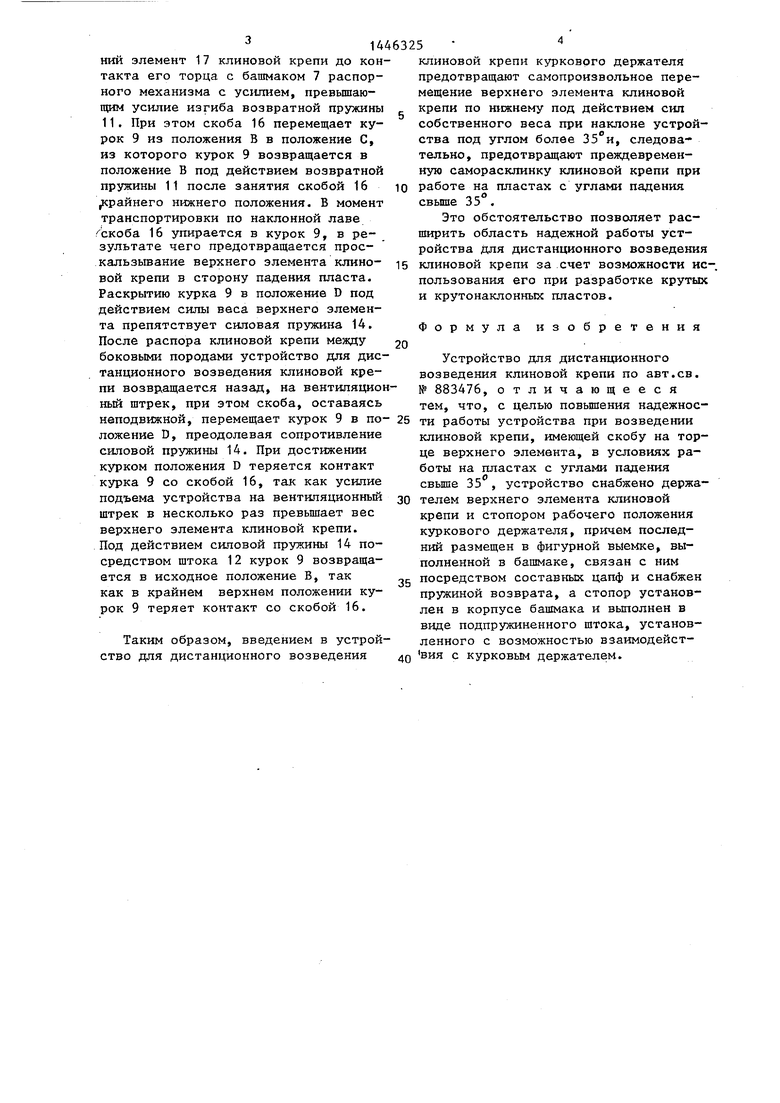
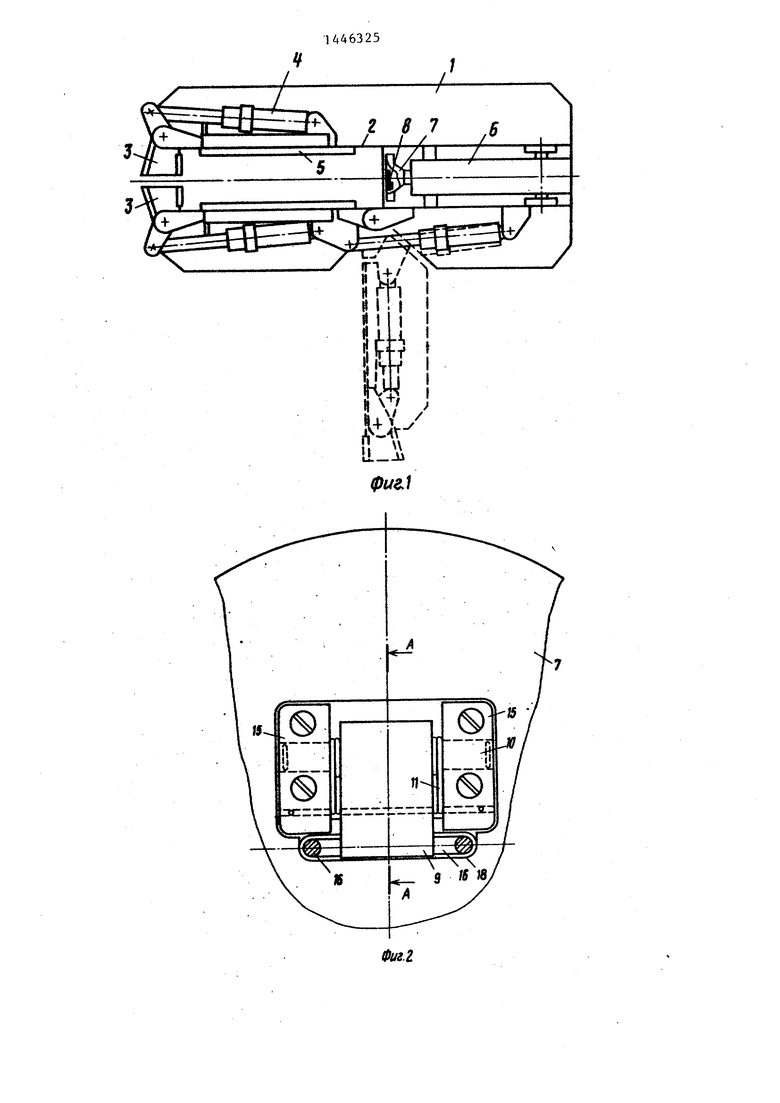
На фиг. 1 изображено устройство с курковым держателем, вид сверху; на фиг. 2 - курковый держатель, вид сверху; на фиг. 3,- разрез А-А на фиг. 2; на фиг. 4 - клиновая крепь в транспортном положении.
Устройство содержит основание 1, вертикальные стенки 2, подвижтаю упоры 3 :с гидродомкратами 4 подпора, подхваты 5 и распорньй механизм с гидроцилиндром 6, башмаком 7 и курко вым держателем 8.
Курковый держатель 8 содержит курок 9 с осью 10 и возвратную пружину 11, стопор рабочего положения ;:урко- вого держателя содержит шток 12, ог- раничительную гайку 13, силовую пружину 14 и две собтавные цапфы 15. Курковый держатель 8 помещен в фигурную выемку в башмаке 7 распорного механизма и жестко связан с ним посредством составных цапф 15, которые болтами соединены с корпусом башмака 7. Курок 9.кинематически связан с составными цапфами 15 посредством собственной оси и возвратной пружины 11, концы которой жестко закреплены в
корпусах цапф 15, с силовой пружиной 14 посредством штока 12.
Устройство работает следукяцим об- (разом.
На вентиляционном штреке в кассету устройства для дистанционного возведения клиновой крепи, образованную с боков стенками 2, с торцов - подвижными упорами 3 и башмаком 7, а снизу подхватами 5, зпсладывают клиновую крепь в транспортном положении (фиг.4 и транспортируют ее по лаве сверху вниз к месту возведения. После доставки крепи на место ее возведения в гидросистему устройства подают под давлением эмульсию или масло. При этом шток гидроцилиндра 6, выдвигаясь перемещает верхний элемент клиновой крепи по нижнему до распора клиновой крепи между боковыми породами с заданным начальным распором, а подвижные упоры 3 удерживают нижний элемент клиновой крепи от движения сверху вниз под действием силы трения верхнего элемента по нижнему. После достижения заданного начального распора клиновой крепи между боковыми породами гидродомкраты 4 подпора автоматически переключаются на слив, в результате чего при движении устройства снизу вверх на вентиляционный штрек подвижные упоры 3 свободно рас- крьгааются.
Принцип действия держателя состоит в следующем.
При укладке в устройство для дистанционного возведения клиновой крепи скобу 16 верхнего элемента 17 вставляют в прорезь 18 на башмаке 7 распорного механизма и перемещают верхНИИ элемент 17 клиновой крепи до контакта его торца с башмаком 7 распорного механизма с усилием, превьшаю- щим усилие изгиба возвратной пружины 11, При этом скоба 16 перемещает курок 9 из положения В в положение С, из которого курок 9 возвращается в положение В под действием возвратной пружины 11 после занятия скобой 16 крайнего нижнего положения. В момент транспортировки по наклонной лаве скоба 16 упирается в курок 9, в результате чего предотвращается проскальзывание верхнего элемента клиновой крепи в сторону падения пласта. Раскрытию курка 9 в положение D под действием силы веса верхнего элемента препятствует силовая пружина 14. После распора клиновой крепи между боковыми породами устройство для дистанционного возведения клиновой крепи возвр,ащается назад, на вентиляцион ньй штрек, при этом скоба, оставаясь
Устройство для дистанционного возведения клиновой крепи по авт.св. № 883476, отличающееся тем, что, с целью повьшения надежнос
неподвижной, перемещает курок 9 в по- 25 ти работы устройства при возведении ложение D, преодолевая сопротивление силовой пружины 14. При достижении курком положения D теряется контакт курка 9 со скобой 16, так как усилие подъема устройства на вентиляционньй штрек в несколько раз превьшает вес верхнего элемента клиновой крепи. Под действием силовой пружины 14 посредством штока 12 курок 9 возвращается в исходное положение В, так как в крайнем верхнем положении курок 9 теряет контакт со скобой 16.
Таким образом, введением в устройство для дистанционного возведения
клиновой крепи, имеющей скобу на тор це верхнего элемента, в условиях работы на пластах с углами падения свыше 35 , устройство снабжено держа
30 телем верхнего элемента клиновой крепи и стопором рабочего положения куркового держателя, причем последний размещен в фигурной выемке, выполненной в башмаке, связан с ним
3g посредством составных цапф и снабжен пружиной возврата, а стопор установлен в корпусе башмака и выполнен в виде подпружиненного штока, установленного с возможностью взаимодейст40 ВИЯ с курковым держателем.
клиновой крепи куркового держателя предотвращают самопроизвольное перемещение верхнего элемента клиновой крепи по нижнему под действием сил собственного веса при наклоне устройства под углом более 35°и, следовательно, предотвращают преждевременную саморасклинку клиновой крепи при работе на пластах с углами падения свьше 35 .
Это обстоятельство позволяет расширить область надежной работы устройства Для дистанционного возведения клиновой крепи за счет возможности ис-. пользования его при разработке крутых и крутонаклонных пластов.
Формула изобретения
Устройство для дистанционного возведения клиновой крепи по авт.св. № 883476, отличающееся тем, что, с целью повьшения надежности работы устройства при возведении
ти работы устройства при возведении
клиновой крепи, имеющей скобу на торце верхнего элемента, в условиях работы на пластах с углами падения свыше 35 , устройство снабжено держа-
телем верхнего элемента клиновой крепи и стопором рабочего положения куркового держателя, причем последний размещен в фигурной выемке, выполненной в башмаке, связан с ним
посредством составных цапф и снабжен пружиной возврата, а стопор установлен в корпусе башмака и выполнен в виде подпружиненного штока, установленного с возможностью взаимодейстВИЯ с курковым держателем.
фие.1
Фиг.
| Устройство для дистанционного возведения клиновой крепи | 1980 |
|
SU883476A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
