15 /4
/7
4
о 00 о со
N)
; Изобретение относится к горнодобываю- |щей промышленности, в частности к устройствам для дистанционного возведения клиновой крепи, и является усовершенствованием изобретения по авт. св. № 883476.
Цель изобретения - повышение надежности работы устройства при возведении линовой крепи в условиях работы на плас- 1гах крутого падения.
i На фиг. 1 изображено устройство с цан- овым держателем, вид сверху; на фиг. 2 - 1цанговый держатель, разрез; на фиг. 3 - Аазрез А-А на фиг. 2; на фиг. 4 - схема транспортировки клиновой крепи к месту ьозведения; на фиг. 5 - узел I на фиг. 4; на фиг. 6 - схема распора крепи в момент ее возведения; на фиг. 7 - узел II на фиг. 6.
Устройство содержит основание 1, верти- ь.альные стенки 2, подвижные упоры 3 с гидродомкратами подпора 4, подхваты и распорный механизм с гидроцилинд- pioM 6, башмаком 7 и цанговым держа- т1елем 8.
I Цанговый держатель содержит корпус 9| с полостью 10, цанги 11 с фигурными п оужинами 12, пластинчатые пружины 13,
froK 14 с концевыми ограничителями и 16 и с выступом 17, имеюшим би- коническую форму поверхности и цилиндрическую пружину 18. Держатель жестко связан с башмаком 7 распорного механизма посредством стакана 19 и шайбы 20. 11 кинематически связана с корпусом 9 посредством пластинчатой пружины И. Шток 14 кинематически связан посредством биконического выступа 17 с фигурной пружиной 12 цанги 11, а посредством концевого ограничителя 16 - с цилиндрической пружиной 18, расположенной в пЬлости 10 корпуса 9.
Устройство работает следующим образом.
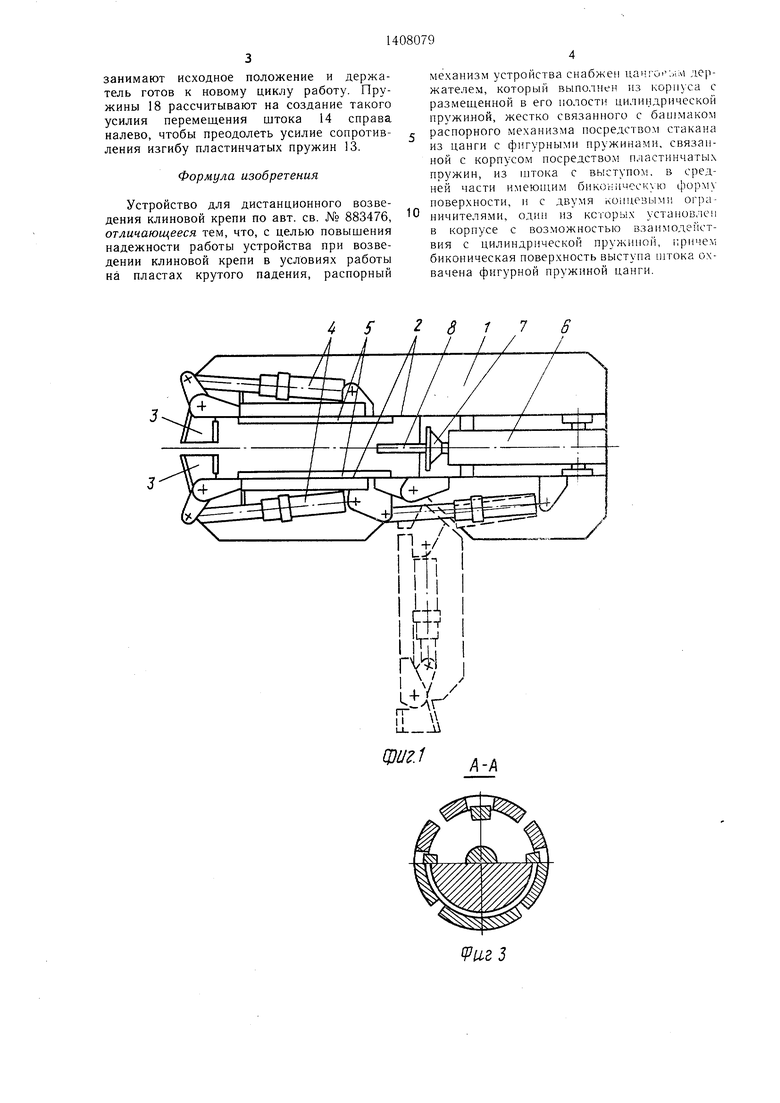
На вентиляционном штреке в кассету устройства для дистанционного возведения клиновой крепи, образованную с боков стенками 2, с торцов - подвижными упорами 3 и башмаком 7, а снизу - под- хйатами 5, укладывают клиновую крепь в транспортном положении (фиг. 4) и транспортируют ее по лаве сверху вниз к месту возведения. После доставки крепи на место ее возведения в гидросистему устройства подают под давлением эмульсию или масло. При этом шток гидроцилиндра 6 вьидвигаясь, перемешаег верхний элемент клиновой крепи по нижнему до распора клиновой крепи между боковыми породами с заданным начальным распором, а подвижные упоры 3 удерживают нижний элемент клиновой крепи от движения сверху вниз под действием силы трения верхнего элемента по нижнему. После достижения заданного начального распора клиновой крепи между боковыми породами гидродомкраты подпора 4 автоматически переключаются на слив, в результате чего при движении устройства снизу вверх, на вентиляционный штрек, подвижные упоры 3 свободно раскрываются. Принцип работы держателя состоит в
следующем. На вентиляционном штреке при укладке в кассету устройства клиновой крепи ее верхний элемент 21 насаживают на держатель с некоторым усилием р. При этом шток 14, упираясь ограничителем 15
0 в дно углубления 22, перемещается из исходного (крайнего левого) положения слева направо на величину а и прижимает биконическим выступом 17 цанги 11 к стенкам углубления 22. Больше, чем на велиr чину а шток 14 продвинуться не может, так как фигурные пружины 12 рассчитывают на сжатие при движении штока 14 слева направо с усилием, превышающим величину р. В результате под действием усилия р создают между держателем и
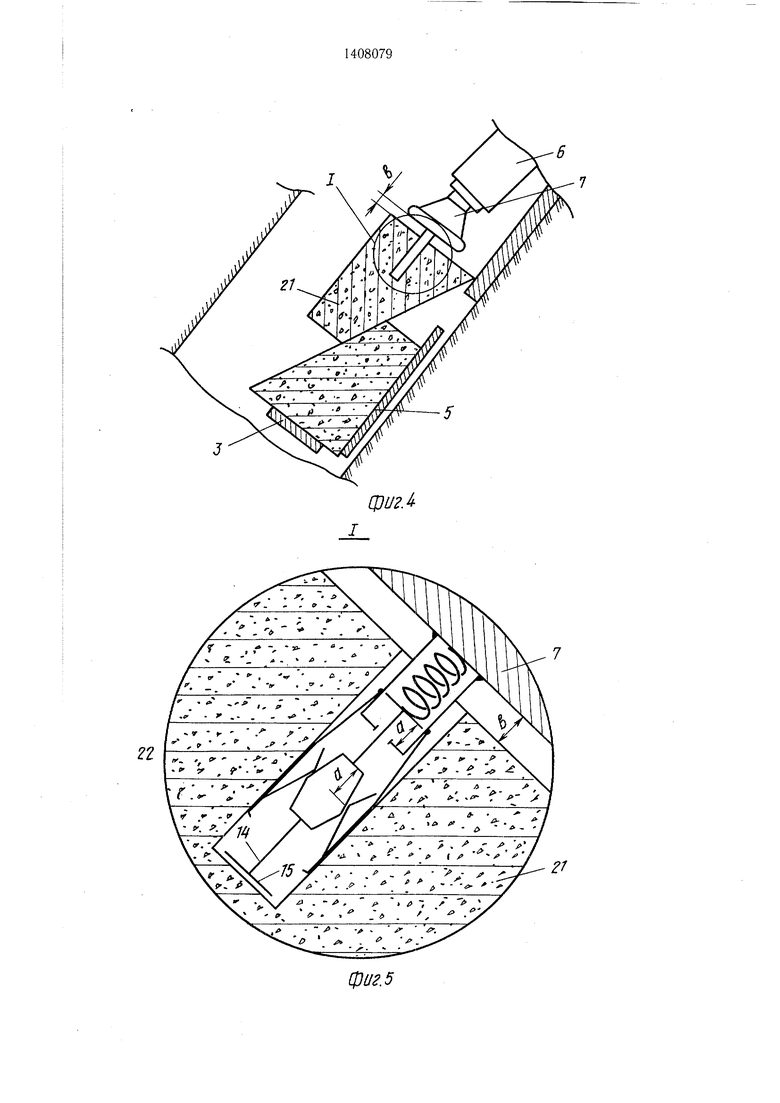
0 стенками углубления 22 силу трения не менее силы веса верхнего элемента 21 клиновой крепи, что позволяет удерживать последний от самопроизвольного проскальзывания по нижнему элементу в момент транспортировки клиновой крепи к месту ее возведения. Между торцом верхнего элемента 21 и башмаком 7 распорного механизма устройства оставляют зазор р.. При возведении клиновой крепи, в момент ее распора между боковыми породаQ ми усилием р подачи штока гидроцилиндра 6 распорного механизма устройства, которое в несколько раз превышает усилие р, шток 14 держателя перемещается относительно его корпуса 9 и цанг 11 слева направо на величину в, преодолевая сопро5 тивление фигурных пружин 12. В конце .пути в фигурные пружины 12 и цанги И возвращаются в исходное положение и распор держателя в углублении ликвидируется.
После возведения клиновой крепи уст- 0 ройство возвращается на вентиляционный щтрек за новым комплектом клиновой крепи. В момент извлечения держателя из верхнего элемента вновь создается распор его в углублении 22 за счет движения штока 14 срава налево под действием цилиндрической пружины 18, но величина этого распора незначительна и легко преодолевается.
5
После извлечения держателя из углуб- Q ления 22 шток 14 под действием пружины 18 занимает исходное, крайнее левое, положение. При этом при переходе наибольшим сечением биконического выступа 17 наименьшего зазора между фигурными пружинами 12 цанги 11 раскрываются, прео- 55 долевая сопротивление пластинчатых пружин 13. После занятия штоком 14 крайнего левого положения, цанги 11 под действием усилий пластинчатых пружин 13 также
занимают исходное положение и держатель готов к новому циклу работу. Пружины 18 рассчитывают на создание такого усилия перемещения штока 14 справа налево, чтобы преодолеть усилие сопротивления изгибу пластинчатых пружин 13.
Формула изобретения
Устройство для дистанционного возведения клиновой крепи по авт. св. № 883476, отличающееся тем, что, с целью повышения надежности работы устройства при возведении клиновой крепи в условиях работы на пластах крутого падения, распорный
механизм устройства снабжен иаи.,;л1 держателем, который выполнен нз корпуса с размешенной в его полости цилиндрической пружиной, жестко связанного с башмаком распорного механизма посредством стакана из цанги с ф1 гурными пружинами, связанной с корпусом посредством пластинчаты.х пружин, из штока с выступом, в средней части имеюн1им бикокичеокую форм поверхности, н с двумя концевыми ограничителями, один из которых установлен в корпусе с возможностью взанмоденст- вия с цилиндрической пружиной, |;рнчем биконическая поверхность выстуна штока охвачена фигурной пружиной цанги.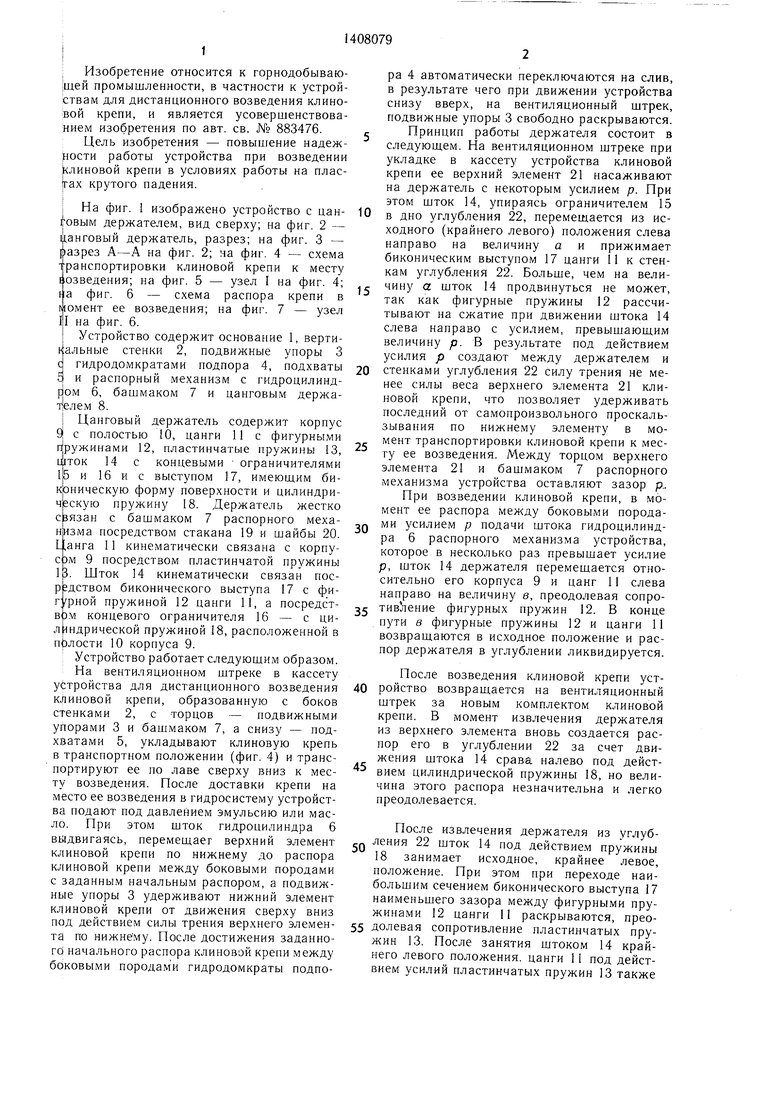
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для дистанционного возведения клиновой крепи | 1986 |
|
SU1446325A2 |
| Устройство для дистанционного возведения клиновой крепи | 1981 |
|
SU994752A2 |
| Станок для монтажа секций механизированной крепи и конвейера | 1990 |
|
SU1774998A3 |
| НАРУЖНАЯ ОСВОБОЖДАЮЩАЯСЯ ТРУБОЛОВКА | 2002 |
|
RU2213201C1 |
| УСТРОЙСТВО ДЛЯ НАПРАВЛЕННОГО РАЗРУШЕНИЯ МОНОЛИТНЫХ ОБЪЕКТОВ | 2006 |
|
RU2319008C1 |
| БОРТОВАЯ ГИДРАВЛИЧЕСКАЯ КРЕПЬ | 1972 |
|
SU335407A1 |
| Скрепероструговая установка для выемки весьма тонких пластов | 1986 |
|
SU1364717A1 |
| Устройство для постановки односторонних заклепок | 1979 |
|
SU984620A2 |
| ТРУБЧАТЫЙ АНКЕР | 1994 |
|
RU2065969C1 |
| Устройство для направленного разрушения монолитных объектов | 1989 |
|
SU1670121A1 |
Изобретение относится к горнодобывающей промышленности, в частности к устр- вам для дистанционного возведения клиновой крепи. Цель - повышение надежности работы устр-ва при возведении клиновой крепи в условиях работы на пласта.х крутого падения. Для этого распорный механизм устр-ва имеет цанговый держатель. Выполнен он из корпуса (К) 9 с полостью 10, цанги 11 с фигурными пружинами 12, штока 14 с концевыми ограничителями 15 и 16 и с выступом 17. Последний имеет в средней части бикони- ческую форму поверхности. В полости 10 К 9 размешена цилиндрическая пружина 18, с которой взаимодействует концевой ограничитель 16. Цанговый держатель жестко связан с башмаком 7 распорного механизма посредством стакана 19 и шайбы 20. Цри возведении клиновой крепи в момент распора ее между боковыми породами усилием подачи штока гидроцилиндра шток 14 держателя перемешается относительно К 9 и цанги И, преодолевая сопротивление фигурных пружин 12. 7 ил. se (Л с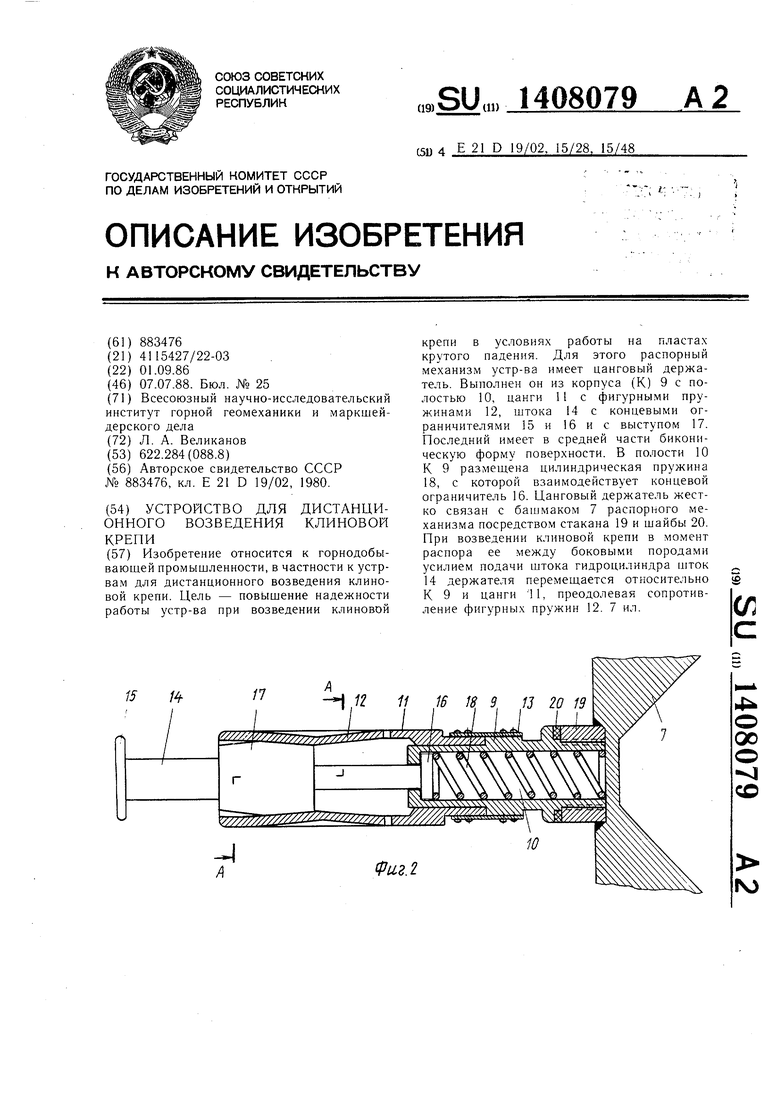
4 S 2 S г 7 ff
1 1 // / / / /
а7
I L- I
I Г
V.T
kv
II
.л
Фи.1
л-л
игЗ
22
Ч
фиг. 5
5
фигЛ
21
21
| Устройство для дистанционного возведения клиновой крепи | 1980 |
|
SU883476A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
