4
4
СХ) О 00
со
Изобретение относится к горному малмностроению, а именно к устройствам для контроля параметров бурения скважины cтaнкa 0I ипиндельного типа.
Цель изобретения - повышение точ ности измерения.
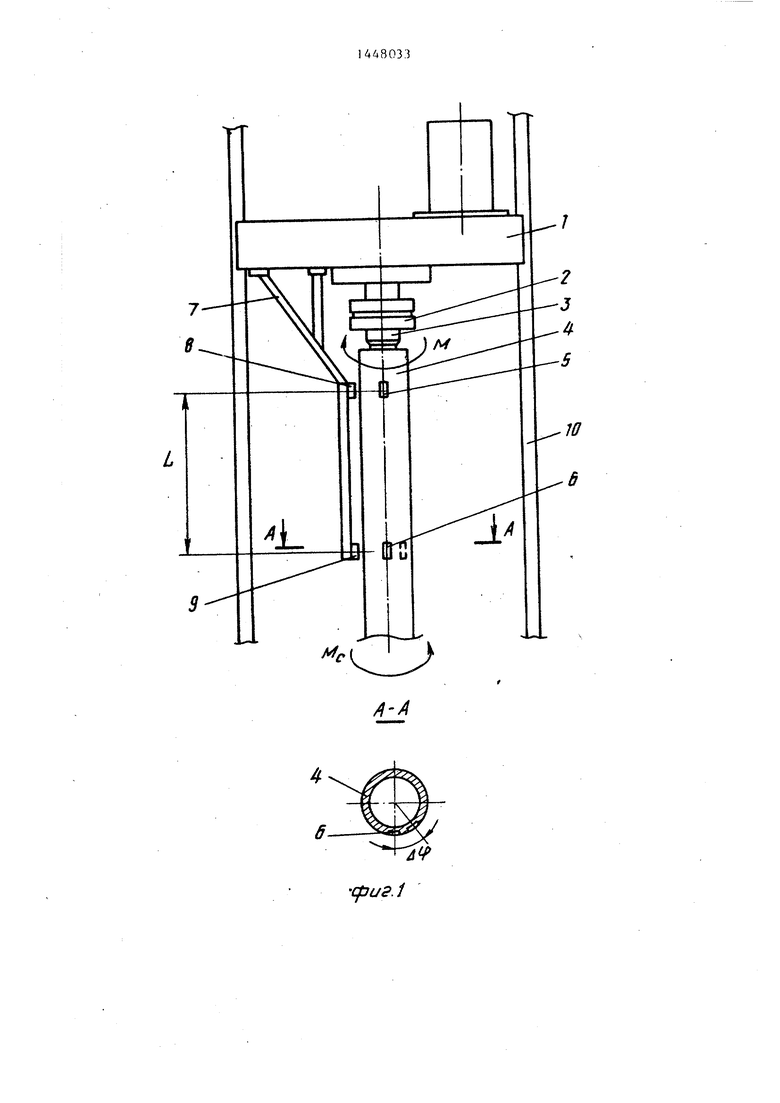
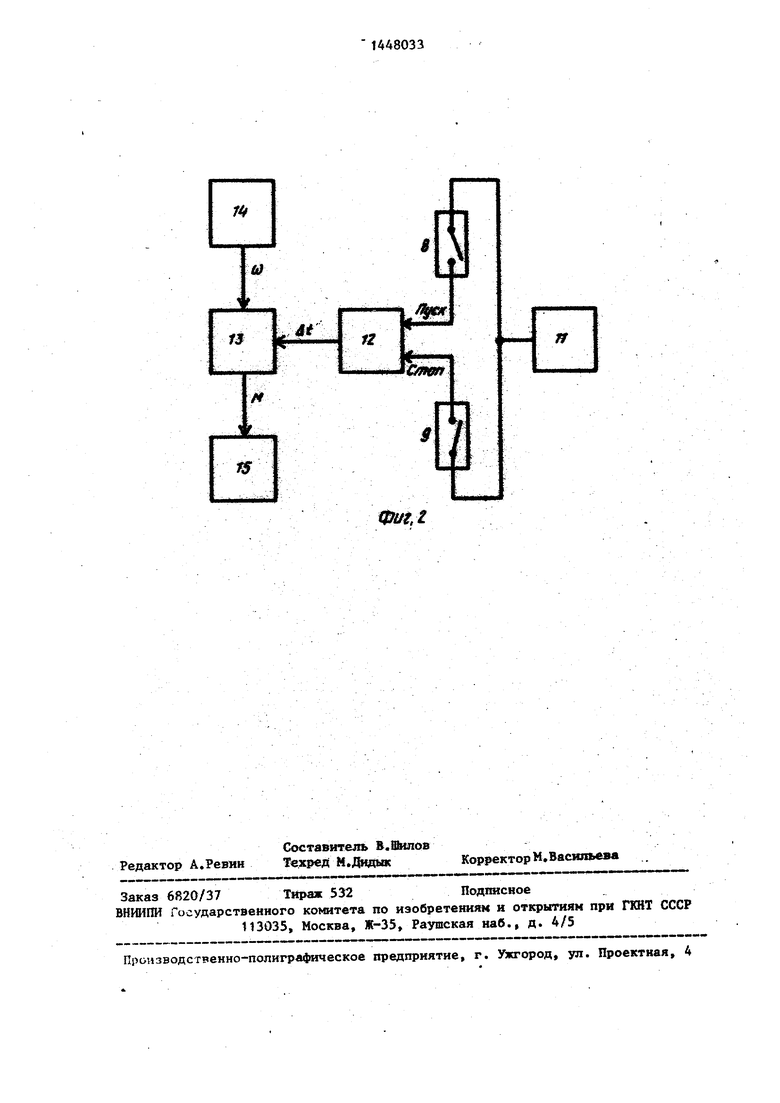
На фйг.1 показано размещение маг- нитоуправляемых контактов на буровом станке; на фиг.2 - блок-схема предла- гаемого устройства.
На фиг.1 изображен вращатель 1 бурового станка, выходной вал которого жестко связан через соединительную муфту 2 и шпиндель 3 с цилиндрическим хвостовиком 4 бурового става. На произвольной общей образукяцей цилиндрического хвостовика 4 укреплены постоянные магниты 5 и 6, находящиеся на, расстоянии L друг от друга. На кор пусе вращателя 1 установлен крон йтейн 7j на KoiropoM установлены два нормальйо разомкнутых магнитоуправля- ev&sx. контакта 8 и 9 так, что контакт
8взаимодействует с магнитным полем магнита 5, установленного на цилиндрическом хвостовике 4 со стороны вращателя t, а контакт 9 взаип одействует
с магнитным полем магнита 6, установленного на цилиндрическом хвостовике 4 со стороны бурового ийструмента (не показан). Вращатель t образует rf пары скольжения с направляющими 10, укрепленными на мачте (не показана) бурового станка. Одан вывод каждого из магнитоуправляемых койтактов 8 и
9(фиг.2) подключен к источнику- питания постоянного напряжения. Второй вьшод контакта 8 подключен к первому пусковому входу, а второй вывод кон- такта 9 - ко второму останавливающему входу измерителя 12 временных интервалов, выход которого соединен с первым входом блока 13 вычисления момента. Выход датчика 14 угловой ско- рости вращения бурового става подклю чены ко второму входу блока 13 вычисления с момента, выход которого соединен со входом индикатора 15. Принцип действия устройства основан на измерении угла упругой крутильной деформации бурового става, возникающей под действием момента сопротивления бурению. .
Устройство работает следующим образом.
В процессе бурения вращатель 1 и жестко связанный с ним через муфту 2 и шпиндель 3 цилиндрический хвосто
вик 4 бурового става (фиг.1) перемещаются в сторону забоя по направляющим 10. Момент MC сопротивления, воз- никшонрй на буровом инструменте, вызывает упругую крутильную деформацию цилиндрического хвостовика 4 бурового става. Согласно закону Тука при кручении, взаимш угол Mf закручивания двух параллельных сечений, расположенных на расстоянии L, определяется по формуле:
&cf
рад.
(1)
5 0
5
о
5
где М - момент вращения бурового става, Н-м;
L - расстояние между сечениями , бурового става, в которых
установлены постоянные магниты 5 и 6, м;
GP - модуль упругости 1ФИ сдвиге, Н/(),
In полярный момент инерции бурового става, равный
Ip()/32, м где dц и ct - наружньй и внутрен«1Й Диаметры бурового става, соответственно.
Иостоянный нагнкт 6, установленШ)1й первоначально на общей образукщей с магнитом 5, смещается в плоскости, перпендикулярной оси вращения на угол utf(в разрезе на фиг.1 новое положение магнита 6 показано пунктирной линией).
Взаимодействие магнитных полей магнитов 5 и 6 с мaгнитoyпpaвляe в Iми контактами 8 и 9, установленныьш на кронштейне 7, вызывает их замыкание в момент наибольшего сближения магнитов и контактов. При отсутствии де- б формации цилиндрического хвостовика и бурового става замыкание контактов 8 и 9 происходит одновременно.
Смещение магнита 6 относительно магнита 5 на угол иq вызывает запаз- дьшание замыкания контакта 9 относительно контакта 8 на время fit, определяемое из соотношения
Jit
йМ -5-
(2)
где СО - угловая скорость вращения
бурового става, рад/с. При за шании магнитоуправляемого контакта 8 (фиг,2) сигнал Пуск в
виде постоянного напряжения от источника 11 питпиия поступает на первый (пусковый) вход измерителя 12 временных интервалов, который начинает отсчет времени. Замыкание магни- тоуправляемого контакта 9 приводит к поступлению сигнала Стоп в виде постоянного напряжения, поступающего на второй (останавливакяций) вход из- мерителя 12 временных интервалов, который формирует на своем выходе сигнал At с определенной частотой, соответствующий измеренному в данньй момент промежутку времени между ера- батьгеаниями магнитоуправляемых контактов 8 и 9. Частота измерения определяется измерителем 12 временных интервалов. Сигнал u.t с выхода измерителя 12 временных Интервалов посту- пает на один вход блока 13 вычисления момента, на второй вход которого с датчика 14 угловой скорости Q вращения бурового става непрерывно поступает синхронизация о величине Q .
Блок 13 вычисления момента функционирует в соответствии с алгоритмом
М со- ut-G-Ip/L,
полученным на основании выражения (1) и (2), причем постоянные величины G, IP к L задаются с помощью за- датчиков заранее.
Результат измерения момента отображается на индикаторе 15.
Для выполнения условия одновременности замыкания магнитоуправляемых контактов 8 и 9 достаточно установить магниты на общей образующей, определенной, например, путем разметки поверхности хвостовика бурового става, а затем провести ручной про- ворот бурового става до срабатывания одного из контактов, после чего второй контакт смещают до положения, в котором он также замыкается. В этих положениях контакты и магниты окончате льно фиксируют. Все операции проводят при неподвижном раз груженном буровом ставе (т.е. момент вращения равен нулю)
Для компенсации ошибки установки магнитов и контактов в программу вычислений момента вращения может быть введена поправка. Для определения по правки проводят измерение времени между срабатыванием контактов при вращении бурового става без нагруз
д gjn25
30
35
40
. .
-
15
3ки и определяют угол ошибки установки, равньт
utfo ut,, рад.
В этом случае формула (2) приобретает вид:
ЛЧ-1 дд-,, ut -- , с.
Таким образом, магниты и контакты могут быть установлены (либо точность их установки может быть учтена) с любой требуемой точностью.
Предлагаемое устройство может быть использовано как при промьшшенной эксплуатации бурового става (в качестве элемента АСУ режимами бурения), так и при экспериментальных исследованиях (в качестве автоматического устройства измерения и регистрации момента вращения бурового става).
Формула изобретения
Устройство для измерения момента вращения бурового става, цилиндрический хвостовик которого жестко связан с вращателем, содержащее преобразователь угла, соединенный с входами узла кон троля, включающего источник питания и блок вычисления момента, подключенный к индикатору, отличающееся тем, что, с целью увеличения точности, узел контроля снабжен датчиком угловой скорости вращения бурового става и измерителем временных интервалов, а преобразователь угла выполнен в виде двух нормально- разомкнуть Х магнитоуправляемых контактов, расположенных на жестко прикрепленном к вращателю кронщтейне,а два постоянных магнита расположены на одной образующей цилиндрического хвостовика бурового става с возможностью взаимодействия с соответствующим магнитоуправляемым контактом, при этом выходы источника питания соединены с первыми выводами магнитоуправляемых контактов, вторые вьшоды которых подключены к соответствующим входам измерителя временных интервалов, выход измерителя временных интервалов соединен с первым, а выход датчика угловой скорости вращения бурового става - с вторыми входами блока вычисления момента.

| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ВРАЩЕНИЯ ГОРНЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2034145C1 |
| Датчик скорости задающего вала | 1983 |
|
SU1148979A1 |
| Устройство для определения механических характеристик грунта в процессе бурения | 1986 |
|
SU1414928A1 |
| Устройство для измерения глубины скважины в процессе бурения | 1982 |
|
SU1116148A1 |
| СИСТЕМА ДЛЯ ОРИЕНТАЦИИ УСТРОЙСТВ НАПРАВЛЕННОГО БУРЕНИЯ ГОРИЗОНТАЛЬНЫХ И СИЛЬНОНАКЛОНЕННЫХ СКВАЖИН | 1991 |
|
RU2015316C1 |
| Способ определения содержанияпОлЕзНОгО иСКОпАЕМОгО B МАССиВЕ | 1979 |
|
SU806855A1 |
| Устройство для измерения глубины скважины в процессе бурения | 1987 |
|
SU1430510A1 |
| СПОСОБ ПРОГНОЗИРОВАНИЯ ОПАСНОСТИ ГАЗОДИНАМИЧЕСКИХ ЯВЛЕНИЙ В МАССИВЕ ГОРНЫХ ПОРОД И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2382202C1 |
| Способ определения плотности объемного электрического заряда и постоянной времени его релаксации в потоке диэлектрической жидкости и устройство для его осуществления | 1987 |
|
SU1493966A1 |
| Патрон буросбоечной машины | 1980 |
|
SU935609A1 |
Изобретение относится к буровым станкам и позволяет повысить Точность измерения момента вращения (MB) бурового става. Узел контроля снабжен датчиком угловой скорости вращения бурового става и измерителем временных интервалов. Преобразователь угла выполнен в виде двух нормально-разомкнутых магнитоуправляемых контактов (МК), установленных на жестко прикрепленном к вращателю кронштейне. Постоянные магниты расположены на общей образующей цилтздрического хвостовика бурового става и взаимодействуют с соответствуннцими Ж. Выводы МК подключены ко входу измерителя временных интервалов, с выхода которого сигнал, соответствующий периоду времени между срабатываниям МК, поступает на первый вход блока вычисления MB. Сигнал с датчика угловой скорости вращения бурового става поступает на второй вход блока вычисления MB. Результат вычисления МБ отображается на индикаторе. 2 ил. с € W с
cpL/г. 1
1Ш.1
| Нанкин Ю.А., Герасимов И.В | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| М.: Недра, 1980, с.98 | |||
| Патент США № 3596718, кл | |||
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
