4ib
00
Нэобретение относится к контрольно-измерительной технике и робототехнике и может быть использовано для измерения расстояния между двумя точками.
Цель изобретения - повьшгенйе быстродействия за счет параллельного проведения ряда вычисленнй.
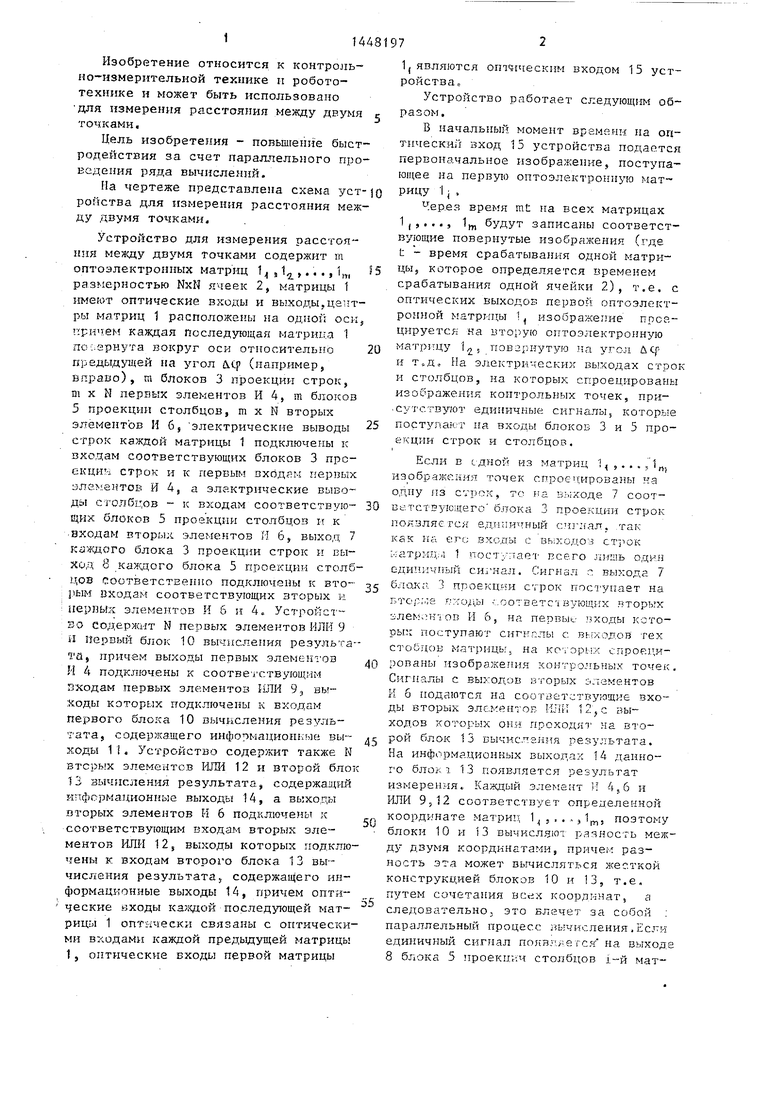
На чертеже представлена схема устройства для измерения расстояния между двумя точками.
Устройство для измерения расстояния меяоду двумя точками содержит m оптоэлектронных матриц 1 j l. Vi размерностью NxN ячеек 2, матрицы 1 имеют оптические вкоды и выходы,цаит- ры матриц 1 расположены на одной оси каждая последующая матри1г,а 1 по дернута вокруг оси относительно предьщущей на угол лср (например, вправо), m блоков 3 проекции строк, m X N первь х элементов И 4, m блоков 5 проекции столбцов, m х N вторых элементов И б, электрические выводы строк каждой матрицы 1 подключены к входам соответствующих блоков 3 проекции строк и к первым входам первых элементов И 4, а электрические выводы столбцов - к входам соответствующих блоков 5 проекции столбцов и к входам вторых элементов И 6, выход 7 каждого блока 3 проекции строк и выход 8 ка ;цого блока 5 проекцир столбцов соответственно подключены к вто- 1.1ЫМ входам соответствующих вторых н элементов И 6 и 4. Устройство содерлшт N первых элементов ИЛИ 9 и Первый блок 10 вычпслегшя результаI a, причем выходы первых элемент ов И 4 подключены к соотвеч ствующим входам первых элементов 1ШИ 9, выходы которых подключены к входам первого блока 10 вычисления результата, содержащего инфопнационмые выходы 11. Устройство содержит также N вторых элементов liJIH 12 и второй блок 13 ВЕ.чисо1ения результата, содержащий ипфсфмационные выходы 14, а выходы вторых элементов И 6 подключены х соответствующим входам вторых элементов ИШ-1 12 5 выходы которых подключены к входам второго блока 13 вычисления результата, содержащего информационные выходы 14, причем опти- г еские входы последующей матрицы 1 оптнчески связаны с оптическими входам каждой предьщущей матрицы 1J оптические входы первой матрицы
1j являются отчгческпм входом 15 устройства.
Устройство работает следующим образом,
В начальный момент времени на оптический вход 15 устройства подается первоначальное изображение, поступающее на первую оптоэлектронную мат рицу 1j .
Через время rat на всех матрицах
0
5
1
( 9 S
будут записаны соответствующие повернутые изображения (где t - время срабатывания одной матрицы, которое определяется временем срабатывания одной ячейки 2), т,е, с оптических ВЫХОДОБ первой оптоэлект- ронной матрицы 1, изображение прск- цируетс ; ка оптоэлектронную матрзтду 1,2 5 повзрнутую па угол uCf- и . На электрических выходах строк и столбцов, на которых спроецированы изображеиия контрольных точек, при- сутствуют единичные сигналы, которые nocTiTiaioT на входы блоков 3 и 5 проекции строк и столбцов.
Если в с-дной из матри
м
1.
изобралсеаия точек спроецированы 5ia одну из cvT OK. тс на выходе 7 соот
ветствующего блока 3 проекции строк появляется единичный . так как на его входы с вь;5::одо с строк :-;атриБ,;.1 1 nocTyrraei- всего лишь один сдипичя ый сигнал. Сигнал с выхода 7
35
блакп.
проекц - И строк поступает на
0
5
G
5
i;.TOp;,;e -г оответс вующггх вторых з-леькм1 1оп И 6, на персыи входы которых поступают сигкплы с выходов тех стобцов :--{атрмцьк на Ko-roptix спроеГ И- рованы изобрахкепия контрольт)ых точек. Сигналы с выходов вторых элементов К б подаются на соответствующие входы BTOpbix эле.мйнтоБ ИЛИ 12., с ходов которых они проходят на второй блок 13 сычислен5 я результата. На информационных выходах 14 дангю- го блок 13 появляется результат измерения. Каждый Н 4,6 и ИЛИ 9,12 соответствует определенной координате матриц ..,1,„ поэтому блоки 10 и 13 вычисляют разность между двумя координатами, причем разность эта может вычисляться жесткой конструкцией блоков 10 и 13, т.е. путем сочетания всех координат, а следовательно, это влечет за собой ; параллельный процесс лЬ Числения.Если единичный сигнал появляется на выходе 8 блока 5 проекции столбцов i-й матрицы., то измерение идет аналогичным образом, но в данном процессе задействованы первые элементы И 4, ИЛИ 9 и первый блок 10 вычисления результата, на выходах 11 которого присутствует код результата измерения.
Есди измерение проходило на определенной i-й матрице 1;, то в ней изображение точек повернуто вправо относительно первоначального на величину угла, равного i-uif.
Определение угла наклона прямой, проходящей через контрольные точки, осуществляется путем учитывания матрицы 1j , на которой происходит измерение, и блоков 10 и 13, на выходах 1 и 14 которых появляется результат.
Формула изобретения
Устройство для измерения расстоя ния между двумя точками, содержащее оптоэлектронную матрицу размер- ностыо М X N с оптическими входами и выходами, отличающееся тем, что, с целью повьш ения быстродействия, оно снабжено т-1 оптоэлект poHKof матрицей размерностью N х N ячес К с оптическ; ми входами и выхода ми, центры матриц расположены на одной оси, причем каждая послед аощая матрица повернута относительно оси по отношению к предьщущей на угол
ЛС.
m
блохами проекции строк, m х N
первь1ми элементами К, tn блоками про0
5
25
п .
екции столбцов, m X N вторыми элементами И, N первыми элементами ИЛИ и первым блоком вычисления результата, N вторыми элементами ИЛИ и вторым блоком вычисления результата, электрические выводы ячеек каждой строки и каждого столбца каждой матрицы подключены к входам соответствующего элемента ИЛИ, электрические выводы строк каждой матрицы подключены к входам соответствующих блоков проекции строк и к первым входам первых элементов
И, а электрические выводы столбцов - . к входам соответствующих блоков проекции столбцов и к первым входам вторых элементов И, выходы каждого блока проекции строк и проекции столбцов соответственно подключены к вторым входа -- соответствующих вторых и первых элементов И, причем выходы первых элементов И подключены к соответствующим входам первых элементов ИЛИ,выходы которых подключены к входам пер-, вого блока вычисления результата, содержащего информационные выходы, а выходы вторых элементов И подключены к соответствующим входам вторых элементов 1ШИ, выходы которых подключены к входам второго блока вычисления результата, содержащего информационные выходы, причем оптические входы каждой последующей матрицы оптически связаны с оптическими входами каждой предьщущей матрицы, а оптические вхо- ды пер вой матрицы являются оптическим входом устройства.
0

| название | год | авторы | номер документа |
|---|---|---|---|
| Аналого-цифровой преобразователь изображений | 1990 |
|
SU1800437A1 |
| Оптоэлектронное модульное устройство для параллельного сложения оптических цифровых картин в системе остаточных классов | 1990 |
|
SU1751783A1 |
| Устройство для измерения периметра объектов | 1981 |
|
SU1101674A1 |
| АВТОСТЕРЕОСКОПИЧЕСКИЙ К-РАКУРСНЫЙ ДИСПЛЕЙ С ПОЛНОЭКРАННЫМ РАЗРЕШЕНИЕМ В ИЗОБРАЖЕНИИ КАЖДОГО РАКУРСА (ВАРИАНТЫ) | 2017 |
|
RU2659190C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ОПТИЧЕСКОГО СИГНАЛА | 1991 |
|
RU2029351C1 |
| Составитель страницы оптоэлектронного запоминающего устройства | 1972 |
|
SU445076A1 |
| СПОСОБ ОЦЕНКИ НАПРЯЖЕННОСТИ ЭЛЕКТРОМАГНИТНОГО ИЛИ АКУСТИЧЕСКОГО ПОЛЯ ПО СИГНАЛАМ ЭЛЕМЕНТОВ АНТЕННОЙ РЕШЕТКИ, РАСПОЛОЖЕННЫХ ВБЛИЗИ ИСКАЖАЮЩЕГО ПОЛЕ РАССЕИВАТЕЛЯ (ВАРИАНТЫ) | 2008 |
|
RU2405165C2 |
| Оптический транспарант | 1989 |
|
SU1647649A1 |
| Оптоэлектронное устройство ввода информации | 1987 |
|
SU1501022A1 |
| ОПТОЭЛЕКТРОННОЕ ВЫЧИСЛИТЕЛЬНОЕ УСТРОЙСТВО | 1998 |
|
RU2134899C1 |
Изобретение относится к контрольно-измерительной технике. Цель изобретения - повьппение быстродействия за счет параллельного проведения ряда вычислений. Устройство содержит m матриц, установленных последовательно на одной оси и повернутых одна относительно другой на угол &tp . Матричная конструкция позволяет одновременно анализировать положение проекции точек на каддой из матриц и регистрировать лишь сигнал с той матрицы, проекции точек на одну из координат которой совпадают, тогда расстояние между точками по другой координате фиксируется как искомое. 1 ил.
| Способ измерения расстояния между двумя точками | 1984 |
|
SU1244486A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| f | |||
