Изобретение относится к контрольно-измерительной технике и может быть использовано в автоматических анализаторах .изображения.
Известно устройство для автоматического подсчета изолированных фигур в телевизионном изображении, содержащее дискретную апертуру, логические элементы И, ИЛИ, НЕ и счетчик. Принцип действия устройств основан на параллельном считывании изображения и параллельном нелинейном его преобразовании логическими элементами 1.
Недостатком этого устройства является узкие функциональные возмо ности, так как оно не обеспечивает измерение периметра фигуры.
Наиболее близким к изобретению является устройство для измерения периметра объектов, содержащее блок считывания информации, блок коррекции и блок измерения периметра, в котором оптическое изображение фигуры преобразуют в последовательность .электрических сигналов, быделяют и с корректирующими поправками суммруют импульсы, соответствующие сторонам многоугольника, вершины которого образованы точками пересечения изображения строками сканирования и проекциями этих точек на соседние строки 2.
Недостатком известного устройств является низкая скорость измерения периметра.
Целью изобретения является повышение быстродействия измерения периметра.
Поставленная цель достигается тем, что, устройство для измерения периметра объектов, содержащее блок считывания информации, блок коррекции- и блок измерения периметра, снабжено блоком управления, блок счр;тывания информации выполнен в виде оптоэлектронной матрицы и двух соединенных последовательно матричных регистров, первый из которых соединен с выходом оптоэлектронной матрицы, блок коррекции состоит из соединенных последовательно дешифратора, счетчика и сумматора, блок измерения периметра выполнен в виде канала измерения вертикальны составляющих и канала измерения горизонтальных составляющих, каждый из которых состоит из соединенных последовательно схемы сравнения, счетчика и сумматора, первый и второй выходы второго матричного регистра соединены соответственно с первым входом дешифратора блока коррекции и с вторым входом дешифратора блока коррекции, соединенным с входом схемы сравнения канала измерения вертикальных составляющих, третий выход второго матричного регистра соединен с входом схемы
сравнения канала измерения горизонтальных составляющих, вторые входы счетчиков блока коррекции и блока измерения периметра соединены между собой, третьи входы счетчиков блока коррекции и канала измерения вертикальных составляющих объединены,соответствующие выходы блока управления соединены с объединенными входами счечиков блока коррекции и блока измерени периметра,блока коррекции и канала измерения вертикальных составляющих, с третьим входом счетчика канала измерения горизонтальных составляющих , с вторым входом первого матричного регистра и с вторым матричным регистром.
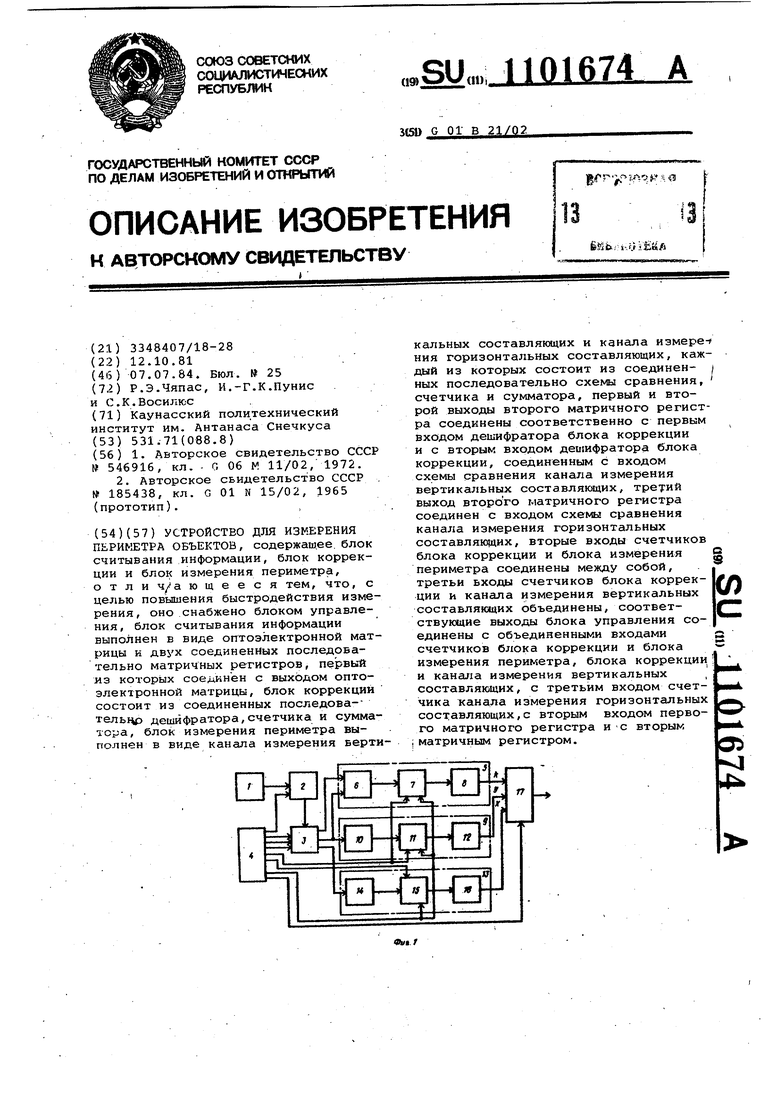
На фиг. 1 приведена структурная схема предлагаемого устройства; на фиг. 2 - 4 - пример, поясняющий работу устройства.
Устройство для измерения перимет содержит блок онитывания информации выполненный в виде оптоэлектронной матрицы 1, первого матричного регистра 2, второго матричного регистра 3, блок 4 управления, блок 5 коррекции, выполненный в виде дешифратора 6, счетчика 7 и сумматора 8, блок измерения периметра, содержщий канал 9 измерения вертикальных составляющих, выполненный в виде схемы 10 сравнения, счетчика 11 и сумматора 12, канал 13 измерения горизонтальных составляющих, выполненный в виде схемы 14 сравнения, счетчика 15 и сумматора 16, и вычислитель 17 периметра, выход которого является выходом устройства.
Выход оптоэлектронной матрицы 1 подключен к первому входу первого матричного регистра 2, соединенного последовательно с вторым матричным регистром 3, второй вход матричного регистра 2 соединен с выходом блока 4 управления.
Первый и второй выходы второго матричного регистра 3 подключены соответственно к первому и второму входами дешифратора 6, к выходу которого последовательно подключены счетчик 7 и сумматор 8. Второй и третий выходы второго матричного регистра 3 соответственно подключены к схемам 10 и 14 сравнения, к выходам которых соответственно последовательно подключены счетчики 11 и 15 и сумматоры 12 и 16, первый второй и третий входы вычислителя 17 периметра соответственно подключены к выходам сумматоров 8,12 и 16
Выходы блока 4 управления соединены с счетчиками 7,11 и 15, матричными регистрами 2,3 и четвертым входом вычислителя 17.
Устройство работает следующим образом.
Измерение периметра-изображения производится путем апроксимации
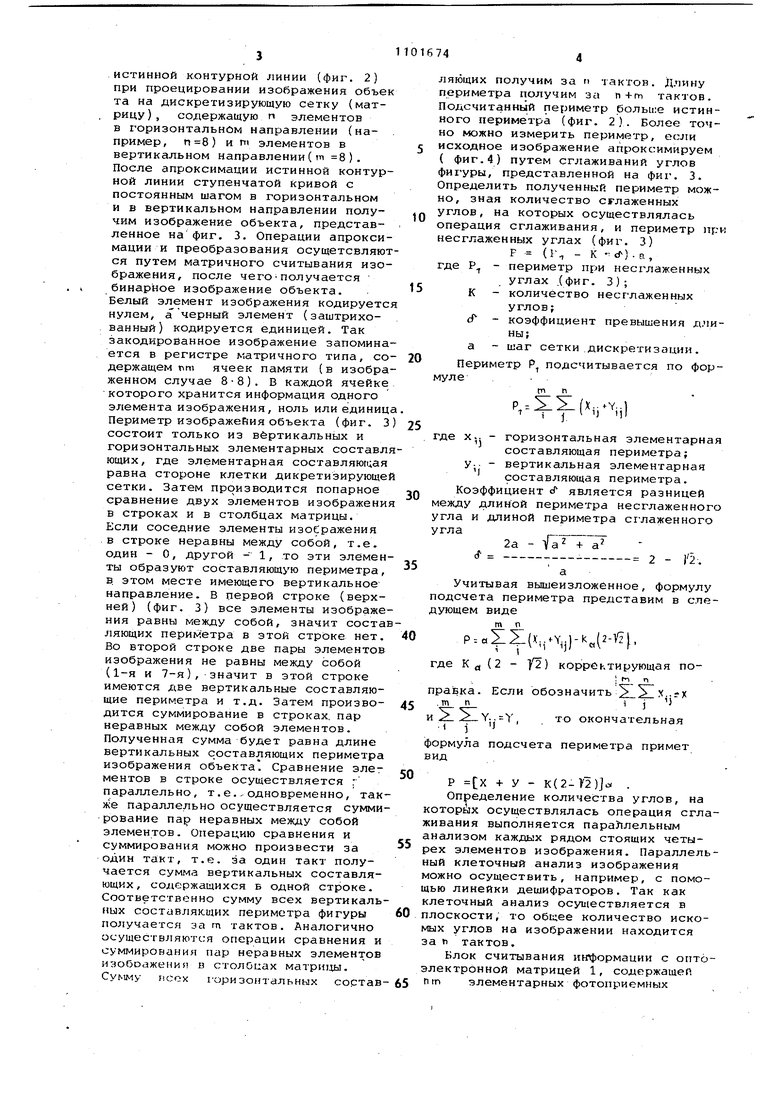
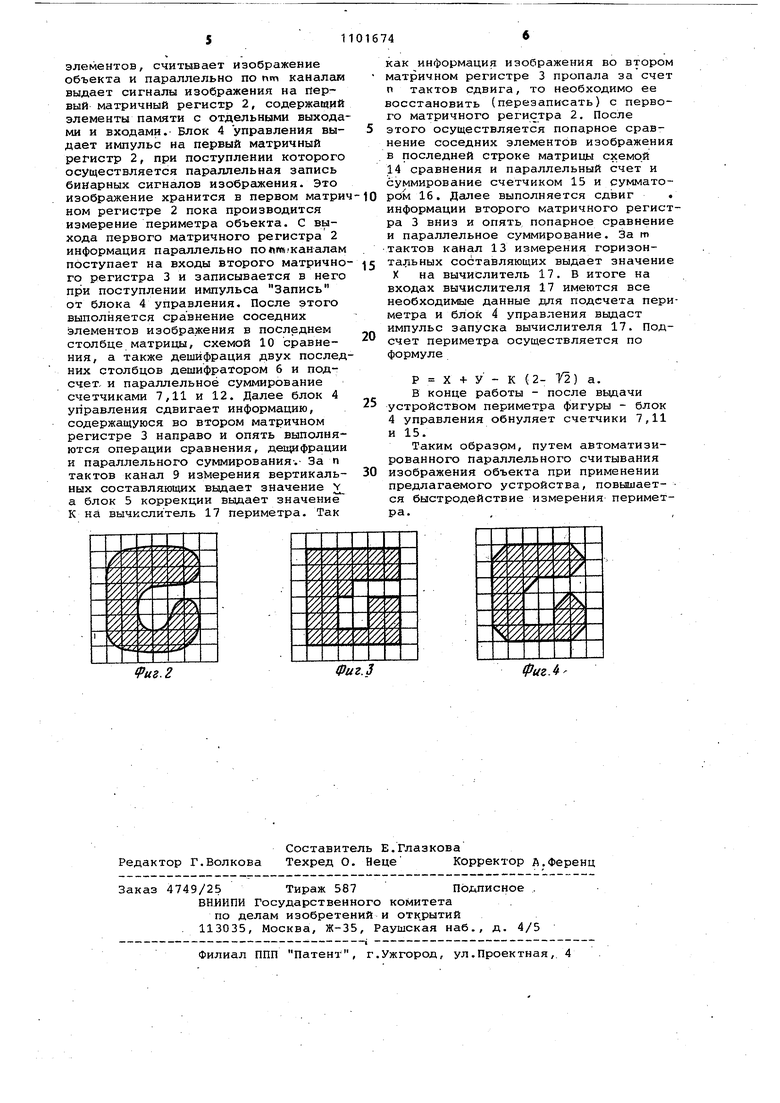
истинной контурной линии (фиг. 2) при проецировании изображения объек та на дискретизирующую сетку (матрицу), содержащую м элементов в горизонтальном направлении (например, п 8 ) и П1 элементов в вертикальном направлении(m 8). После апроксимации истинной контурной линии ступенчатой кривой с постоянным шагом в горизонтальном и в вертикальном направлении получим изображение объекта, представленное нафиг. 3, Операции апроксимации и преобразования осущетсвляются путем матричного считывания изображения, после чегополучается бинарное изображение объекта. Белый элемент изображения кодируется нулем, а черный элемент (заштрихованный) кодируется единицей. Так закодированное изображение запоминается в регистре матричного типа, содержащем rm ячеек памяти (в изображенном случае 8-8). В каждой ячейке которого хранится информация одного элемента изображения, ноль или единица Периметр изображения объекта (фиг. 3 состоит только из вертикальных и горизонтальных элементарных составляющих, где элементарная составляющая равна стороне клетки дикретизирующей сетки. Затем производится попарное сравнение двух элементов изображения в строках и в столбцах матрицы. Если соседние элементы изображения в строке неравны между собой, т.е. один - О, Другой - 1, то эти элементы образуют составляющую периметра, в. этом месте имеющего вертикальное направление. В первой строке (верхней) (фиг. 3) все элементы изображения равны между собой, значит составляющих периметра в этой строке нет. Во второй строке две пары элементов изображения не равны между собой (1-я и 7-я), значит в этой строке имеются две вертикальные составляющие периметра и т.д. Затем производится суммирование в строках, пар неравных между собой элементов. Полученная сумма будет равна длине вертикальных составляющих периметра изображения объекта. Сравнение элементов в строке осуществляется : параллельно, т.е.- одновременно, также параллельно осуществляется суммирование пар неравных между собой элементов. Операцию сравнения и суммирования можно произвести за один такт, т.е. за один такт получается сумма вертикальных составляющих, содержащихся Б одной строке. Соответственно сумму всех вертикальных составляющих периметра фигуры получается за m тактов. Аналогично осуществляются операции сравнения и суммирования пар неравных элементов изобоажения в столбцах матрицы. Сумл1у псох горизонтальных сортавляющих получим за ti тактов. Длину периметра получим за п+т тактов. Подсчитанный периметр больше истинного периметра (фиг. 2). Более точно можно измерить периметр, если исходное изображение апроксимируем { фиг.4) путем сглаживаний углов фигуры, представленной на фи1. 3. Определить полученный периметр можно, зная количество сглаженных углов, на которых осуществлялась
0 операция сглаживания, и периметр при несглаженных углах (фиг. 3) F (1% - К -d).n, где Р - периметр при несглаженных
углах .(фиг. 3 ) ;
5 К - количество несглаженных
углов;
сГ - коэффициент превышения длины;а - шаг сетки дискретизации.
Периметр Р. подсчитывается по формуле
fn h
(
РГ5
где X.. - горизонтальная элементарная
п
составляющая периметра;
У;. - вертикальная элементарная
составляющая периметра. Коэффициент сГ является разницей между длиной периметра несглаженного угла и длиной периметра сглаженного угла
2а - fc
а + а
cf
2 - |2.
Учитывая вышеизложенное, формулу подсчета периметра представим в следующем виде
p.«it(X,..Y,.)-k(2-yi. где К а (2 - У5) корректирующая по1 t п
,.,
npaiBKa. Если обозначить
i J
.т п
.,.г,
ТО окончательная
формула подсчета периметра примет
вид
Р Х + У - К(2-У2)о. .
Определение количества углов, на которых осуществлялась операция сглаживания выполняется параллельным анализом каждых рядом стоящих четырех элементов изображения. Параллельный клеточный анализ изображения можно осуществить, например, с помощью линейки дешифраторов. Так как клеточный анализ осуществляется в плоскости, то общее количество искомых углов на изображении находится за и тактов.
Блок считывания ин юрмации с оптоэлектронной матрицей 1, содержащей пm элементарных фотоприемных элементов, считывает изображение объекта и параллельно по nm каналам выдает сигналы изображения на Первый матричный регистр 2, содержащий элементы памяти с отдельными выхода ми и входами.- Блок 4 управления выдает импульс на первый матричный регистр 2, при поступлении которого осуществляется параллельная запись бинарных сигналов изображения. Это изображение хранится в первом матри ном регистре 2 пока производится измерение периметра объекта. С выхода первого матричного регистра 2 информация параллельно попгт.каналам поступает на входы второго матрично го регистра 3 и записывается в него при поступлении импульса Запись от блока 4 управления. После этого выполняется сравнение соседних элементов изображения в последнем столбце матрицы, схемой 10 сравнения, а также дешифрация двух послед них столбцов дешифратором 6 и подсчет- и параллельное суммирование счетчиками 7,11 и 12. Далее блок 4 управления сдвигает информацию, содержащуюся во втором матричном регистре 3 направо и опять выполняются операции сравнения, дещифрации и параллельного суммирования. За п тактов канал 9 измерения вертикальных составляющих выдает значение v а блок 5 коррекции выдает значение К на вычислитель 17 периметра. Так как информация изображения во втором матричном регистре 3 пропала за счет п тактов сдвига, то необходимо ее восстановить (перезаписать) с первого матричного регистра 2. После этого осуществляется попарное сравнение соседних элементов изображения в последней строке матрицы схемой 14 сравнения и параллельный счет и суммирование счетчиком 15 и сумматором 16. Далее выполняется сдвиг . информации второго матричного регистра 3 вниз и опять попарное сравнение и параллельное суммирование. За m тактов канал 13 измерения горизонтахЕьных составляющих выдает значение X на вычислитель 17. В итоге на входах вычислителя 17 имеются все необходимые данные для подсчета периметра и блок 4 управления выдаст импульс запуска вычислителя 17. Подсчет периметра осуществляется по формуле Р X + у - К (2- У2) а. В конце работы - после выдачи устройством периметра фигуры - блок 4 управления обнуляет счетчики 7,11 и 15. Таким образом, путем автоматизированного параллельного считывания изображения объекта при применении предлагаемого устройства, повышает- ся быстродействие измерения периметра.
WAT.
24 т й
Фиг.З
fuz.Z
ФигЛ 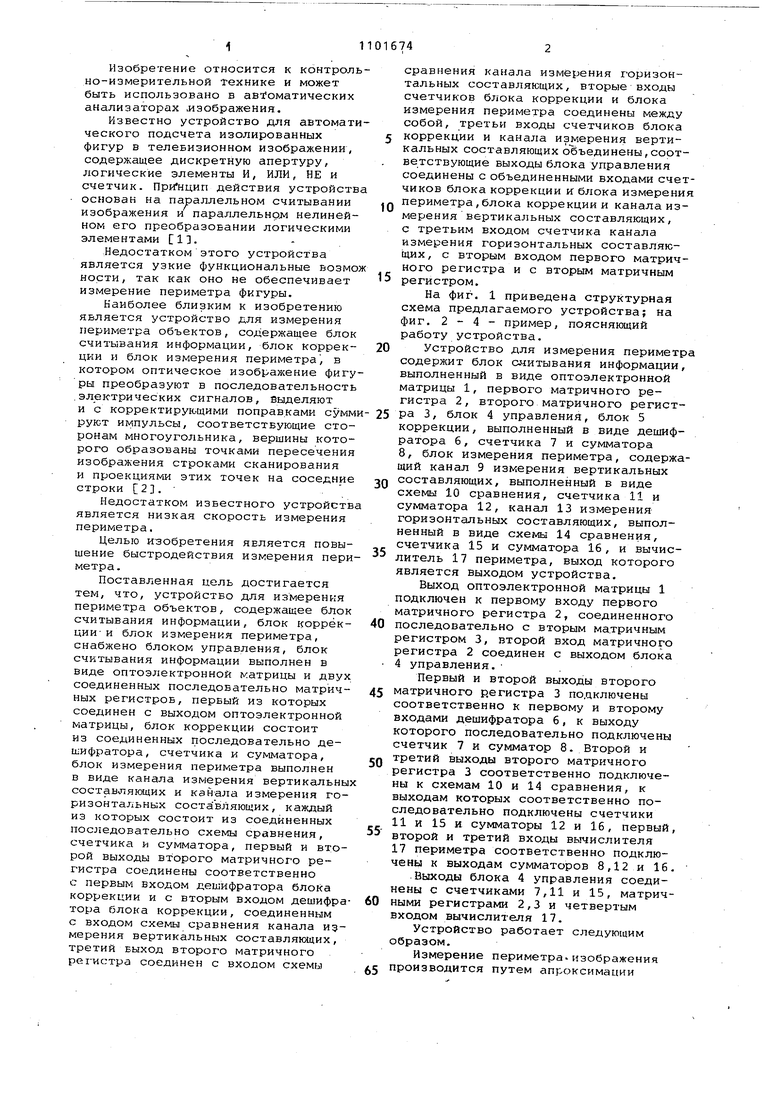
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ЗАПИСИ-ВОСПРОИЗВЕДЕНИЯ МНОГОКАНАЛЬНОЙ ЦИФРОВОЙ ИНФОРМАЦИИ | 1995 |
|
RU2107953C1 |
| Устройство для формирования информации на телевизионном индикаторе | 1981 |
|
SU1075298A1 |
| Устройство компенсации сигнала царапин кинопленки | 1988 |
|
SU1536521A2 |
| УСТРОЙСТВО ДЛЯ УМНОЖЕНИЯ МАТРИЦ КАРТИН-ИЗОБРАЖЕНИЙ | 1991 |
|
RU2018916C1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМНОЖЕНИЯ ЧИСЛОВЫХ МАТРИЦ | 1991 |
|
RU2022334C1 |
| Устройство для умножения десятичных чисел | 1984 |
|
SU1198514A1 |
| Устройство для селекции изображений объектов | 1987 |
|
SU1525718A1 |
| Устройство для определения координат объекта | 1990 |
|
SU1814196A1 |
| УСТРОЙСТВО ДИВЕРГЕНТНОГО ДЕКОДИРОВАНИЯ СЕГМЕНТОВ ЛИНЕЙНОЙ РЕКУРРЕНТНОЙ ПОСЛЕДОВАТЕЛЬНОСТИ | 2023 |
|
RU2820053C1 |
| Кодек на основе кода Рида - Маллера первого порядка | 1990 |
|
SU1777243A1 |
УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПЕРИМЕТРА ОБЪЕКТОВ, содержащее, блок считывания информации, блок коррекции и блок измерения периметра, отлич/ающееся тем, что, с целью повышения быстродействия изме рения, оно снабжено блоком управления, блок считывания информации выполнен в виде оптоэлектронной мат рицы и двух соединенных последовательно матричных регистров, первый из которых соединен с выходом оптоэлектронной матрицы, блок коррекций состоит из соединенных последова-тельнр дешифратора,счетчика и сумма тора, блок измерения периметра выполнен в виде канала измерения верт кальных составляющих и канала измере-f ния горизонтальных составляющих, каждый из которых состоит из соединен- i ных последовательно схемы сравнения, счетчика и сумматора, первый и второй выходы второго матричного регистра соединены соответственно с первым входом дешифратора блока коррекции и с вторым входом дешифратора блока коррекции, соединенным с входом схемы сравнения канала измерения вертикальных составлякяцих, третий выход второто матричного регистра соединен с входом схемы сравнения канала измерения горизонтальных составляющих, вторые входы счетчиков блока коррекции и блока измерения Р периметра соединены между собой, третьи входы счетчиков блока коррекции и канала измерения вертикальных составляющих объединены, соответствующие выходы блока управления соединены с объединенными входами счетчиков блока коррекции и блока измерения периметра, блока коррекции и канала измерения вертикальных составляющих, с третьим входом счетчика канала измерения горизонтальных составляющих,с вторым входом первого матричного регистра иС вторым матричным регистром.