Изобретение относится к измерительной технике, в частности к способам преобразования параметров емкостных датчиков, и может быть ис- пользовано для автоматизации процессов измерения и контроля перемещений.
Цель изобретения - повьшение точности преобразования за счет уменьшения составляющей сигнала емкостно- го датчика в вькодном напряжении не- ли ейной мостовой схемы, а также за счет исключения фильтрации сигйала.
|На фиг. 1 приведена схема устрой- стйа, реализующего способ преобразо- вайия параметров емкостнрго датчика; на фиг. 2 - пример конкретного выпол- иейия этого же устройства с модулем аналогового входа.
Устройство для преобразования па- раметров емкостного датчика )фиг. 1) содержит генератор 1 импульсов, уп- ра ляемый по частоте, формирующий двухполярные импульсы напряжения, ; первую диодно-резисторную цепь, сое- тоЯщую из диода 2 и резистора 3, емкостный датчик 4, подключенный между общей шиной и точкой соединения диода 2 и резистора 3, вторую диодно резисторную цепь, состоящую из диода 5 и резистора 6, опорный конденсатор 7, подключенный между общей щиной и точкой соединения диода-5 и резистора 6,; образцовьй конденсатор 8, подключенный через ключевой элемент оптрона 9 jc точке соединения диода 2 и резистора 3, блок 10 управления, вькоды которого подключены к управляющему входу генератора 1 импульсов и светоиз- лучателю оптрона 9. Емкость 11 ключевого элемента оптроиа образует последовательную цепь с образцовым конденсатором 8. Выходная щина устройства подключена к точке соединения резисторов 3 и 6.
Устройство согласно фиг. 2 содержит управляемый генератор 12 импульсов, формирующий двухполярные импульсы напряжения, две диодно-резистор- ные цепи, образованные диодами 13, 14 и резисторами 15 и 16, емкостный датчик 17, пoдключeнньri между общей шиной и точкой соединения диода 13 и резистора 15, опорный конденсатор 18 подключенный между общей шийой и точ кой соединения диода 14 и резистора 16, образцовый конденсатор 19, подключенный через ключевой элемент оп
трона 20 к точке соединения диода 1 3 и резистора 15, интегратор 21 , вход которого подключен к точке соединения резисторов 15 и 16, схему 22 дискретизации и хранения с запоминающим конденсатором 23, вход которой соединен с выходом интегратора 21, аналого- цифровой преобразователь 24, соединенный со схемой 22 дискретизации и хранения через входную шину и шину сигнала состояния, микропроцессор 25, соединенный с входом управления интегратора 21, светоизлучателем оптрона 20, управляющим входом генератора 12 импульсов, а также с аналого-цифр вовым преобразователем 24 через шину
26управления и информационную шину
27аналого-цифрового преобразователя Шина 28 инициирования и информационная шина 29 микропроцессора 25 предназначены для связи с центральным процессором.
Устройство (фиг. 1) работает следующим образом.
Емкостной датчик 4 и опорньй конденсатор 7 запитьшаются через диоды 2, 5 импульсами напряжения с. выхода генератора 1 импульсов. При этом, в точке соединения диода 2 и резисто - ра 3 формируются импульсы напряжения с длительностью спада, определяемой постоянно й времени перезаряда суммарной емкости датчика 4 и емкости цепи, образованной последовательно соединенными образцовыми конденсатором 8 и емкостью 11 ключевого элемента оптрона 9. В точке соединения диода 5 и резистора 6 формируются импульсы напряжения с длительностью спада, определяемой постоян- .ной времени перезаряда опорного конденсатора 7. При условии, что длительность импульсов генератора 1 не менее, чем в 5 раз превьшает постоянные времени перезарядных цепей, постоянное выходное напряжение нелинейной мостовой схемы при закрытом ключевом элементе 9 можно принять равным
IT IT f H() /p p ч вь,к V (к+к„)а 21 7)
Rj- ( -C) , (1)
где Ugjjix выходное напряжение нелинейной мостовой схемы;
U - амплитуда напряжения на
емкостном датчике 4 и опорном конденсаторе 7;
f - частота импульсов генератора 1 ;
R - сопротивление резисторов 3, 6;
Кц - сопротивление нагрузки нелинейной мостовой схемы,
R ККн(К+2Кн)
VpVn а экйивалентное сопро- (.к+Кц; тивление перезарядной цепи,
г г
Г Г + а « у 4 г +г г. L g +L,
С - емкость датчика 4; Сд - емкость образцового конденсатора 8;.20 C емкость ключевого элемента
оптрона 9;
. С - емкость опорного конденсатора 7 .
С учетом : нестабйльностне парамет- 25 ров генератора и элементов нелинейной мостовой схемы выражение (1) записывается в виде
Ueb.x
() «о, (2) где и - составляющая выходного напряжения, обусловленная температурной и временной нестабильностью параметров элементов схемы.
В режиме формирования напряжения раз баланса нелинейной мостовой схемы блок 10 управления формирует на управляющем входе генератора сигнал, устанавливающий высокую частоту импульсов на выходе генератора. Емкостной датчик 4 может быть представлен в виде модели из. двух параллельно соединенных конденсаторов: постоянной паразитной составляющей С„ и переменной
составляющей С,; S/d, где - диэлектрическая п роницаемо сть, S - пло щадь пластин датчика, d - расстояние между пластинами.
При С- С.. + -% выражение (2) Ьд- - и
принимает.вид
.b...
д.(3)
В режиме формирования напряжения нулевого уровня U gj,,,, блок 10 управления формирует на управляющем входе генератора 1 сигнал, понищакяций частоту импульсов на выходе генератора до значения F f/io . Сигнал разбаланса нелинейной мостовой схемы, создаваемый емкостным датчиком 4, уменьшается и составляет не более 0,1% от своего первоначального значения. Поэтому напряжение нулевого уровня равно
5 вь..о .- Uo«:U, (4)
В режиме формирования/напряжения полной шкалы ,, ц, блок 10 управления фррмирует сигнал, понижающий частоту импульсов на выходе генератора, и сигнал, открьшающий ключевой элемент оптрона 9. При выборе
Сб , где максимальное значение переменной составляющей Cjt модели датчика, составляющие сигнала разбаланса, создаваемые емкостным датчиком 4 и опорньм конденсатором 7, малы по сравнению с составляющей сигнала разбаланса, определяемой емкостью образцового конденсатора 8. Напряжение полной шкалы равно
.мк., ,) +
+ и„ с и„.
(5)
Результат измерения % определяется - отношением
±. s
F Ced
(6)
Устройство (фиг. 2) работает следующим образом.
Цикл преобразования состоит из трех тактов, каждый из которых состоит из периода интегрирования t и периода преобразования t. Длительность периода интегрирования выбирается равным или кратным длительности периода импульсов низкой частоты F генератора 12. Цикл преобразования начинается с установки низкой : частоты F на выходе генератора I2 импульсов, обесточивания светоизлуча- теля оптрона 20 и приведения интегратора 21 и аналого-цифрового преобразователя 24 в исходное состояние. В первом тайте преобразования за время интегрирования f 1/F на выходе, ин- тегра:тора 21 устанавливается напряжение равное
&ЫХ.О
4J
Uo TF
1448289
N,
(7)
це ме ем да ре 25
где Т постоянная времени интегриро- вания.
Схема 22 дискретизации и хранения осуществляет слежение за уровнем сигнала на выходе интегратора 21 в течение времени интегрирования t и ю поддерживает неизменным уровень сигнала на своем выходе в течение времени, преобразования t, во время кото- рфго аналого-цифровой преобразователь
15
24 преобразует напряжение U Ц 1фровой код N. С выхода аналого-циф- рОвого преобразователя 24, код N передается по информационной- шине 27 в. м}«сропроцессор 25 и заносится в память микропроцессора. В течение этого 20 же периода времени t интегратор 21 и аналого-цифровой преобразователь 24 йриводятся по входам управления в исходное состояние и открьшается клюN,
и заносится в память микропроцессора 25. В случае измерения перемещения, характеризуемого расстоянием d между пластинами емкостного датчика, вычисление результата измерения производится в микропроцессоре 25 по формуле
NU- NC
NX- N
(10)
где k - коэффициент пропорциональности.
Формирование высокой частоты f и низкой частоты F может осуществляться микропроцессором программно, при этом генератор импульсов выполняется в виде формирователя двухполярных импульсов.
Понижение частоты генератора импульсов по предлагаемому способу позволяет уменьшить во столько же раз составляющую выходного напряжения, создаваемую емкостным датчиком, без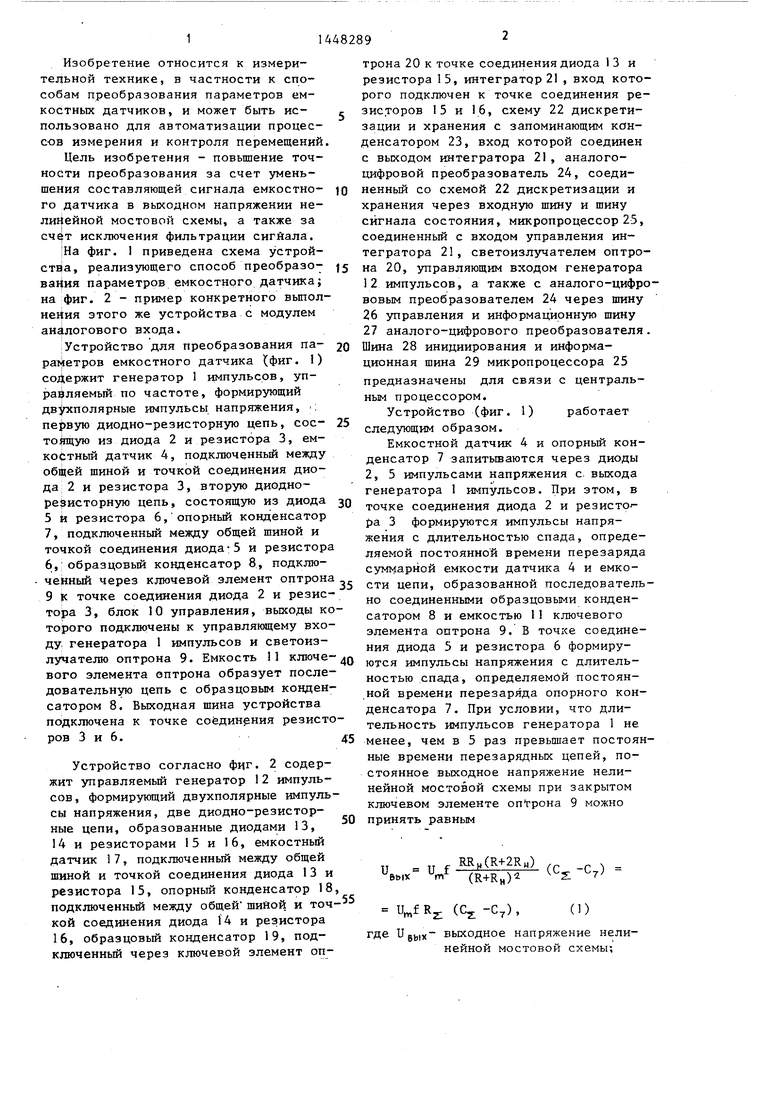
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для преобразования перемещения во временной интервал | 1986 |
|
SU1415035A1 |
| Устройство для преобразования перемещения в частоту импульсов | 1986 |
|
SU1364853A1 |
| СИГНАЛИЗАТОР ОТКЛОНЕНИЯ ПАРАМЕТРА ДАТЧИКА | 1991 |
|
RU2024948C1 |
| АНАЛОГО-ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ ИНТЕГРИРУЮЩЕГО ТИПА ДЛЯ ИЗМЕРЕНИЯ МАЛЫХ ЭЛЕКТРИЧЕСКИХ СИГНАЛОВ | 2018 |
|
RU2693647C1 |
| Способ преобразования перемещения в напряжение и устройство для его реализации (его варианты) | 1981 |
|
SU1026081A1 |
| ПРЕОБРАЗОВАТЕЛЬ ИНЕРЦИАЛЬНОЙ ИНФОРМАЦИИ | 2006 |
|
RU2325620C2 |
| Способ преобразования перемещения в длительность импульсов и устройство для его осуществления (его варианты) | 1984 |
|
SU1227939A1 |
| СТАТИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ ЧАСТОТЫ, НАПРЯЖЕНИЯ И ФАЗЫ | 2006 |
|
RU2311717C1 |
| Емкостный преобразователь перемещения | 1986 |
|
SU1396087A1 |
| УНИВЕРСАЛЬНЫЙ МОДУЛЬ ЧАСТОТНОГО ИНТЕГРИРУЮЩЕГО РАЗВЁРТЫВАЮЩЕГО ПРЕОБРАЗОВАТЕЛЯ ДЛЯ ДАТЧИКОВ ФИЗИЧЕСКИХ ВЕЛИЧИН | 2016 |
|
RU2631494C1 |

Изобретение относится к измерительной технике и способам преобразования параметров емкостных датчиков и может быть использовано для автоматизации процессов измерения и контроля перемещений. Цель изобретения - повьшение точности преобразования - достигается тем, что последовательно формируют на выходе нелинейной мостовой схемы напряжение нулевого уровня, напряжение полной шкалы и напряжение, пропорциональное разности токов перезаряда емкостного датчика и опорного конденсатора, формирование напряжения нулевого уровня и напряжения полной шкалы производят- понижением частоты импульсов генератора в 10-10 раз. Понижение частоты импульсов генератора в процессе формирования напряжений нулевого уровня и полной шкалы позволяет повысить точность преобразования за счет уменьшения составляющей сигнала емкостного датчика в выходном напряжении нелинейной мостовой схемы, которого нельзя обеспечить использованием коммутирующих элементов в цепи емкостного датчика. Интегрирование выходного напряжения нелинейной мостовой схемы за период, равный или кратный периоду низкой частоты генератора, повьш1ает быстродействие за счет исключения- фильтрации сигнала, требукхцей применения филь1 ра низких частот с полосой пропускания, лежащей ниже частоты генератора ..импульсов. .п. ф-лы, 2 ил. § (Л
Чевой элемент оптронй 20. Всем процес-25 использования каких-либо коммутирую-. сом преобразования и передачи сигна- ЯЬв управляет микропроцессор 25, в соответствии с командами которого возбуждаются управляющие входы элементов схемы. Во втором такте преобра30
щих элементов в цепи емкостного датчика. Так, при понижении частоты генератора в 10 раз погрешность напряжений нулевого уровня и полной шкалы от изменения емкости датчика не превьшгает 0,1% от сигнала разба - ланса нелинейной мостовой схемы.
инза время t на выходе 21 устанавливается напряжее (jf
.FR Св+ U)dt
1(141
С,
in
SsTF
(8)
В течение напряжение
времени t второго такта
Uc
N
ш
и
8ЫК. Ш
заносится в
преобразуется в код память микропроцессора 25. В этот период времени t интегратор 21 и аналого-цифровой преобразователь 24 приводятся в исход- нее состояние, закрьшаетсй ключевой элемент онтрона 20, а на выходе генератора 12 импульсов устанавливается высокая частота f. В третьем такте преобразования за время f{j на выходе интегратора 21 устанавлива- равное
ется напряжение, «
S
и,
бых, X
.1 (4«f« т J
Uo)dt
u,
+ (9)
55
o TF
В течение времени t третьего такта напряжение Ug, преобразуется в код
использования каких-либо коммутирую-.
щих элементов в цепи емкостного датчика. Так, при понижении частоты генератора в 10 раз погрешность напряжений нулевого уровня и полной шкалы от изменения емкости датчика не превьшгает 0,1% от сигнала разба - ланса нелинейной мостовой схемы.
Интегрирование выходного напряжения нелинейной мостовой схемы за
период времени, равный или кратный периоду низкой частоты генератора импульсов по сравнению с фильтрацией сигнала, обеспечивает более высокое быстродействие и исключает необходимость применения фильтра низких частот со сложной структурой, увеличи- вающего габариты и снижающего надеж- ность всего устройства.
Устройство, реализующее предлага-
емьй способ, может быть использовано в качестве периферийной части по отношению к центральному процессору системы сбора и обработки данных.
50
Формула изобретения
вательно напряжение нулевого уровня, напряжение полной шкалы и напряжение, пропорциональное разности токов перезаряда емкостного датчика и опор- ного конденсатора, отличающийся тем, что, с целью повьше- ния точности преобразованияJ формирование напряжения нулевого уровня и напряжения полной шкалы производят
89
при
8
понижении частоты импульсного напряжения в 10 -10 раз.
Фиг.1
/4
18
.г
/
/7
,
2
гв
/5
27
Фиг.
| Приборы для научньк исследований, 1964, Р 3, с.95-98 | |||
| Электроника, 1980, № 24, с.55-62. |
