Изобретение относится к цифровой Вычислительной технике и может быть использовано для интерпретации экспериментальных зависимостей, в частности для решения задач технической диагностики, задач коррекции динамических характеристик измерительных и управляющих систем.
Цель изобретения - расширение функциональных возможностей устройства за счет увеличения порядка дифференциальных уравнений, описывающих идентифицируемые объекты, и увеличение быстродействия.
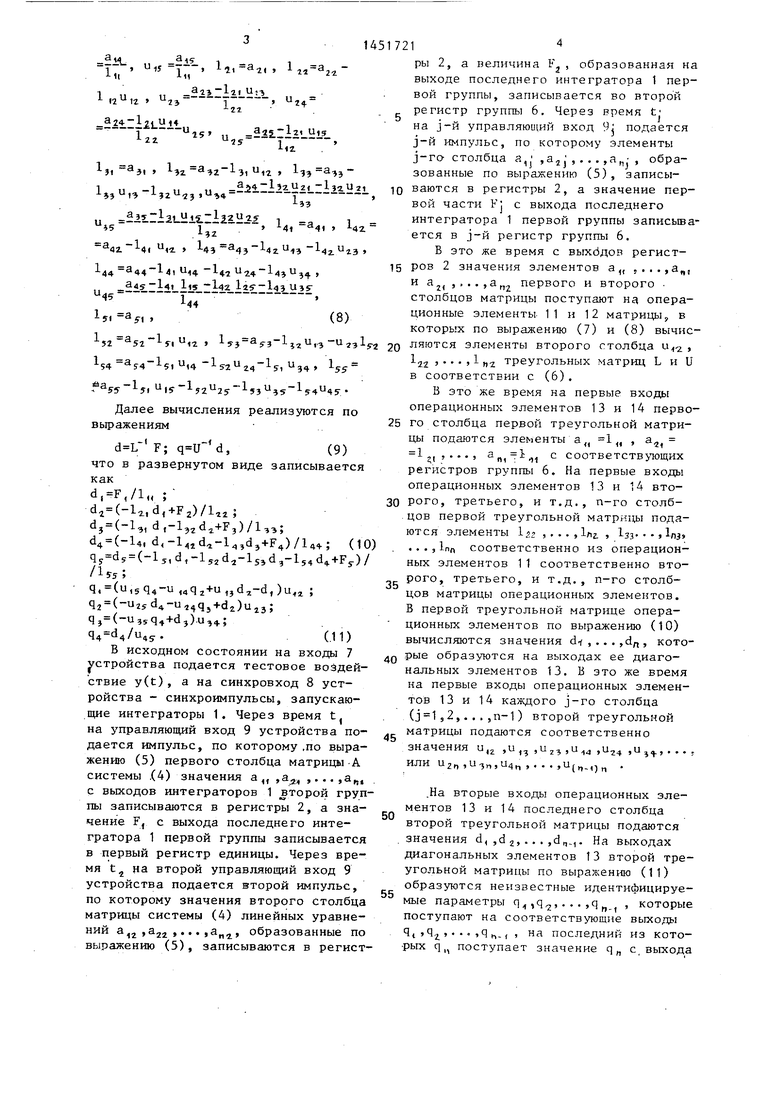
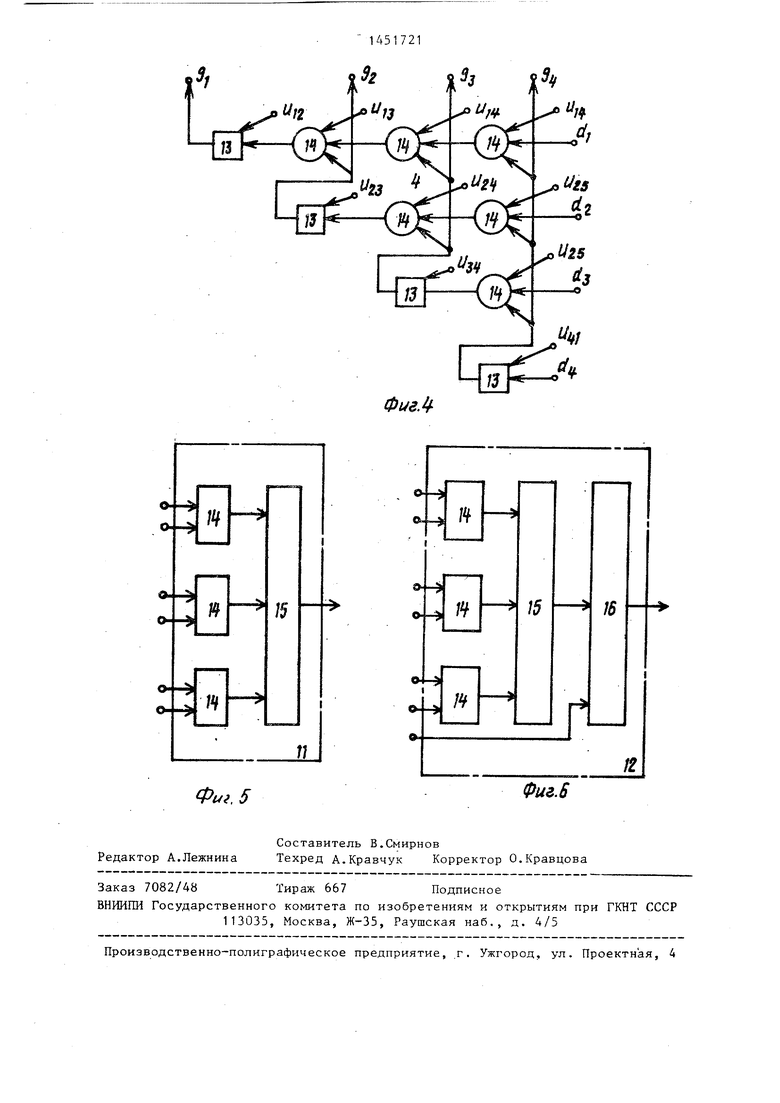
На фиг. 1 представлена схема устройства для идентификации линейных объектов; на фиг. 2 - схема матрицы операционных элементов для случая на фиг. 3 - схема треугольной матрицы операционных элементов для случая на фиг. 4 - схема треугольной матрицы операционных элементов при на фиг.5 и 6 - схемы операционных элементов матрицы опера ционных элементов.
Устройство содержит первую и вторую группы по п интеграторов 1 в каждой, п регистров 2, матрицу 3 размером (ri-l).n операционных элемен- тов, первую треугольную матрицу 4 операционных элементов, вторую треугольную матрицу 5 операционных эле- ментов, группу 6 из (п-1) регистров, вход 7 правой части дифференциально- го уравнения устройства, синхровход устройства, п управляющих входов 9„ устройства и п выходов 10,-10„ идентифицируемых параметров устройства.
Матрица 3 операционных элементов содержит операционные элементы 11
Первая и вторая треугольные матрицы 4 и 5 содержат делители 13 и умножители 14.
Операционные элементы 11 и 12 матрицы 3 операционных элементов содержат умножители 14, сумматор 15 и делитель 16.
Устройство для идентификации линейного стационарного объекта, опи- сываемого дифференциальным уравнени
(t)+q, (t).., + (t)f(t)
(1)
С начальными условиями
(п-0
y(0)q,; у (0) (0)
5172
|Q 5
12
где f(t) - реакция объекта на тесто- вое вх щное воздействие
y(t);
qj,,n - идентифицируемые параметры, работает следующим образом.
Для вычисления параметров q по известным функциям f(t) и y(t) про- интегрируем обе части уравнения (1), используя формулы Дирихле: 4: т тi
}/t jdt...jy(t),J(TО nл
t)- y(t)cJt,
(2)
и после соответствующих преобразований получим выражение
,(t).t,;---1----(T- О
t) y(t)Jt ™-ypj(T-t) f(t)dt.
(3)
В результате дискретизации получим систему алгебраических уравнени вида:
Ч,а„ +qaa,+...,F, ;
(4)
, +qja, + ...,
где элементы матрицы а-- и правая часть вычисляются по формулам: i
(п-1:ттг г
1
,п(п-1)1
(tj-t) f(t)Jt-y(t-). (5)
Решение системы уравнения (4) вида реализуется путем представления матрицы А как произведения нижней и верхней треугольных матриц: ,(6)
элементы которых определяются по рекуррентным соотношениям вида: Ji., ();
i (-/)
;i aii-Z:li U5p/l;;, ();
I .,m, j 1,m,
где a j - элементы матрицы A;
1;: - элементы .матрицы L;
u.j - элементы матрицы U, или в развернутом виде при. элементы матриц L и и представляются как:
а,2
-а,, , и -----, U,5----, и,- i,( J-1
-SlL
Ц,
м -1 l,, i,a, ,
1 1 . 23
2l4.Zili.Hll.
aij -lai U.-j
24
1
гг
15 „ §21lil Hl 15
Mi
- я 31 ,-1
1 „
l,3Ul9-l 2 2}.4
Z l-Z
. lL iiS.y 1 1зэ
U iS.ll2L.ii5.lli2Ujiy 1 -я1
5Ц. . 41 4Z
42. 41 li 45 -14г и„ , ,
44 U,4 -1« U24 l4jU34 ,
Il5 -l42 l25--l43UiS- U.5T--.
15. ау, ,(8)
. l2 . a 5-3-1 „U,,3-U,3l5 l54 aj4-l5,U, -l52U24 l, 34 55 , U,s.-ly2U25.-l5jU,5-l5.U,5..
Далее вычисления реализуются по выражениям
F; ,
(9)
что в развернутом виде записывается
как
d,F,/l,, ;
d(-U,d,+F2)/l«;
dj (-l,, d.,)/,,;
i4 (-l4, d,-l4jd -l,d,+F) (iO
(-l5,d,,,-l5,d,-l5,)/
/ifTs;
q.(u,5q4-u ,4q2+u,,d.j-d,)u,,i ; q2 (,,qj+d2)Ui3; q, (-U3sq4+d5).u,4.;
,5:.(11)
в исходном состоянии на входы 7 стройства подается тестовое воздействие y(t), а на синхровход 8 устройства - синхроимпульсы, запускающие интеграторы 1. Через время t на управляющий вход 9 устройства подается импульс, по которому ,по выражению (5) первого столбца матрицы А
системы .(4) значения а,, ,a.j.,а,
с выходов интеграторов 1 второй группы записываются в регистры 2, а значение F, с выхода последнего интегратора 1 первой группы записывается в первый регистр единицы. Через время t,j на второй управляющий вход 9 устройства подается второй импульс, по которому значения второго столбца матрицы системы (4) линейных уравнений , образованные по
выражению (5), записываются в регистры 2, a величина F , образованная на выходе последнего интегратора 1 первой группы, записывается во второй регистр группы 6. Через время t на j-й управляющий вход 9; подается j-й импульс, по которому элементы
j-ro- столбца а ; ,а
1 1)
, обрао
J JJ
зованные по выражению (5), записываются в регистры 2, а значение первой части FJ с выхода последнего интегратора 1 первой группы записьша- ется в j-й регистр группы 6.
В это же время с выходов регистров 2 значения элементов а„ ,...,а„,
Q
,а„2 первого и второго .
25
30
5
0
5
0
5
И а
столбцов матрицы поступают на операционные элементы. 11 и 12 матрицы, в которых по выражению (7) и (8) вычисляются элементы второго столбца и , треугольных матриц L и U в соответствии с (6).
В это же время на первые входы операционных элементов 13 и 14 первого столбца первой треугольной матрицы подаются элементы а , 1 , , ц 1,,..., соответствующих регистров группы 6, На первые входы операционных элементов 13 и 14 второго, третьего, и т.д., п-го столбцов первой треугольной матри1ц,1 подаются элементы 1гг , . .. , 1лг , 1зз 1пз .. ., Inn соответственно из операционных элементов 11 соответственно второго, третьего, и т.д., п-го столбцов матрицы операционных элементов. В первой треугольной матрице операционных элементов по выражению (10) вычисляются значения d,...,dn, которые образуются на выходах ее диагональных элементов 13. В это же время на первые входы операционных элементов 13 и 14 каждого j-ro столбца (,2,...,п-1) второй треугольной матрицы подаются соответственно значения и, ,и,, ,и„,и, ,и ,и,...,
или и ,U,r,,U4n , . . . ,U(, ,
.На вторые входы операционных элементов 13 и 14 последнего столбца второй треугольной матрицы подаются .значения d, ,d г,.. . ,d,. На выходах диагональных элементов 13 второй треугольной матрицы по выражению (11) образуются неизвестные идентифицируемые параметры q,q,...,q , которые поступают на соответствующие выходы Чс q.i ,q и, , на последний из которых q,, поступает значение q с, выхода
514
диагонального элемента последней строки первой треугольной матрицы.
Формула изобретения
Устройство для идентификации ли- нейных стационарных объектов, содержащее первый и второй интеграторы первой группы, отличающее- с я тем, что, с целью расширения функциональных возможностей за счет увеличения порядка дифференциальных уравнений, описывающих идентифицируемые объекты, и увеличения быстродействия, в него введены с третьего по п-й интеграторы первой группы, где п - порядок дифференциального уравнения, описывающего идентифицируемый объект, вторая группа из п интеграторов, с первого по п-й регистры, группа из п-1 регистров, матрица размером (п-1)-п операционных элементов, первая треугольная матрица и вторая треугольная матрица операционных элементов, причем вход правой части дифференциального уравнения устройства подключен к первым информационным входам первых интеграторов первой и второй групп, выход с-го интегратора (,,,.,п-1) первой группы подключен к информационному входу (с+1)-го интегратора первой группы, выход п-го интегратора первой группы подключен к информационным входам регистров группы, выход с-го интегратора второй группы подключен к информационному входу (с-1)-го интегратора второй группы и к информационному входу с-го регистра, выход п-го интегратора второй группы подключен к информационному входу п-го регистра, с первого по п-й управляющие входы устройства подключены соответственно к входам записи регистров с первого по п-й и соответственно к входам записи регистров с первого по (п-1)-й группы, вход синхронизации устройства подключен к синхровходам всех интеграторов первой и второй групп, выхода с первого по п-й р-го регистра (,...,п) подключены соответственно к входам с первого по п-й р-й группы матрицы операционных элементов, выходы с первого по (р-1)-й р-й группы матрицы операционных элементов подключены соответственно к входам первой группы первой треугольной матрицы операционных элементов, вы7216
ходы с р-го по (п-1)-й р-й группы матрицы операционных элементов подключены соответстенно к входам первой группы второй треугольной матрицы операционных элементов, выходы регистров с первого по (п-1)-и группы подключены соответственно к входам второй группы первой треугольной матрицы операционных элементов, выходы с первого по (п-1)-и которой подключены соответственно к входам второй группы второй треугольной матрицы операционных элементов, вы- 5 ходы с первого по (п-1)-и первой треугольной матрицы операционных элементов и п-й выход второй треугольной матрицы операционных элементов подключены соответственно к выхо- 0 дам с первого, по п-й идентифицируемых параметров устройства, при этом р-й вход первой группы матрицы операционных элементов подключен к первым информационным входам первой 5 группы операционных элементов р-й строки матрицы операционных элементов, входы с первого по п-й а-й группы (, ... ,п) матрицы операционных элементов подключены соответственно 0 к вторым информационным входам первой группы (а-1)-х операционных элементов с первого по п-й столбцов матрицы операционных элементов, выход Ь-го операционного элемента р-й строки (,...,п-1) матрицы операционных элементов подключены к (Ь-р+1)-му выходу первой группы матрицы операционных элементов и к (р+2)-м информационным входам первой группы Ь-х операционных элементов строк с р-й по п-й матрицы операционных элементов, выход k-ro операционного элемента а-й строки (,...,а-1) матрицы операционных элементов подключены к k-м информационным входам второй группы с (k+1)-ro по (п-1)-й операционный элемент а-й строки матрицы операционных элементов и к k-му выходу второй группы матрицы операционных элементов, при этом в первой треугольной матрице операционных элементов первый информационный вход i-ro операционного элемента j-й строки (,..., п-1, ,...,n-j) подключен к (i+jn- j (j-1) / 2)-му входу первой группы первой треугольной матрицы операционного элемента, j-й вход второй группы которой подключен к второму информационному входу (n-j)-ro операционного
0
5
0
55
элемента j-й строки первой треуголь- ной; матрицы операционных элементов, выход 1-го операционного элемента т-й строки первой треугольной матриць операционных элементов (,...,т-2, ,.,.,n-2) подключен к второму информационному входу (1-1)-го операционного элемента первой треугольной матрицы операционных элементов, выход первого операционного элемента j-й строки первой треугольной матрицы операционных элементов подключен к третьим информационным входам j-x операционных элементов строк с первой по j-ю первой треугольной матрицы операционных элементов и к j-му выходу первой треугольной матрицы операционных элементов, причем первые операционные элементы всех строк первой треугольной матрицы операционных элементов представляют собой делители, а остальные операционные элементы первой треугольной матрицы операционных элементов представляют собой умножители, первый информационный вход i-ro операционного элемента j-й строки второй треугольной матрицы операционных элементов подключен к (i+j()/2)-Myвходу первой группы второй треугольной матрицы операционных элементов, г-й вход второй группы которой подключен к второму информационному входу первого операционного элемента г-й строки второй треугольной матрицы операционных элементов, выход s-ro операционного элемента t-й строки (,...,n, ,..., t-1) второй треугольной матрицы операционных элементов подключен к второму информационному входу (з+1)-го операционного элемента t-й строки второй треугольной матрицы операционных элементов, выход q-ro операционного элемента q-й строки (q 1,... ,п-1) второй треугольной матрицы операционных элементов подключен к третьим информационным входам q-x операционных элементов строк с (q+1) по п-ю второй треугольной матрицы операционных элементов и к q-му выходу второй треугольной матрицы операционных элементов, выход п-го операционного элемента п-й строки второй треугольной матрицы операционных элементов подключен к п-му выходу второй треугольной матрицы операционных элементов, при этом q-e операционные элементы
0
5
0
q-й строки второй треугольной матрицы операционных элементов представляют собой делитель, а все остальные операционные элементы второй треугольной матрицы операционных элементов представляют собой умножители, при -и операционный элемент т -и строки матрицы операционных элементов (, .., n-1,|u 1..., п-1) содержит группу из d/2 умножителей, (d - число информационных входов -го операционного элемента ju-и строки матрицы операционных элементов) , сумматор и делитель, v-й .информационный вход (,.,.,d) первой группы -го операционного элемента jU-й строки матрицы операционных элементов подключен к.первому информационному входу v-ro уъ{ножителя, v-й информационный вход второй группы -го операционного элемента |U-и строки матрицы операционных элементов подключен к второму информационному 5 входу v-ro умножителя, выходы умножителей подключены к информационным входам сумматора, выход которого подключен к первому информационному входу делителя, второй информационный вход которого подключен к (d+1)-My информационному входу операционного элемента (К -и строки матрицы операционных элементов, выход делителя подключен к выходуV-ro операционного элемента in -и строки матрицы операционных элементов, при этом и-й операционный элемент w-й строки матрицы операционных элементов (, ...,(w-1),w 2,...,п) содержит группу из п /2 умножителей (fT - число информационных входов и-го операционного элемента w-й строки матрицы операционных элементов) и сумматор, х-й информационный вход (х 1 « ) первой группы и-го операционного элемента w-й строки матрицы операционных элементов подключен к первому информационному входу и-го умножителя, х-й информационный вход второй группы и-го операционного элемента w-й строки матрицы операционных элементов подключен к второму информационному входу и-го умножителя, выходы множителей подключены к информационным входам сумматора, выход которого подключен к выходу и-го операционного элемента w-й строки матрицы операционных элементов.
0
0
5
0
S}
9s
5
и,
w
о 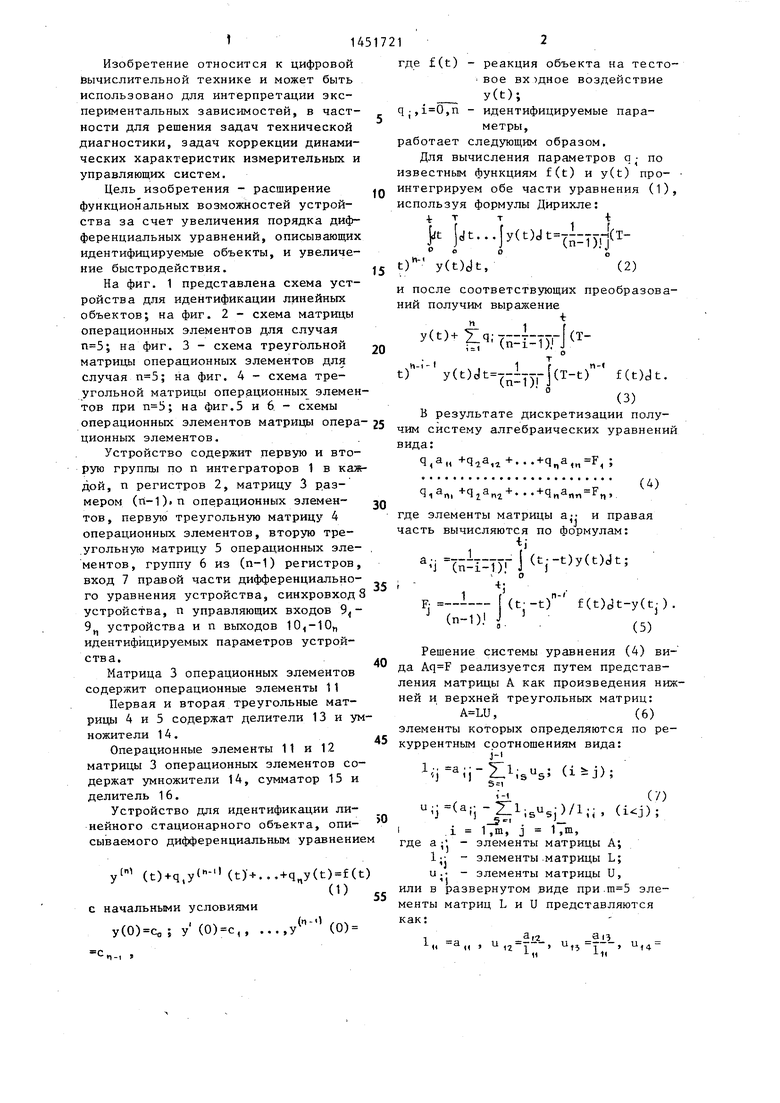
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для треугольного разложения ленточных матриц | 1988 |
|
SU1587540A1 |
| Устройство для решения систем линейных алгебраических уравнений | 1988 |
|
SU1569846A1 |
| Однородная вычислительная структура | 1985 |
|
SU1251104A1 |
| Однородная вычислительная структура для @ разложения матриц | 1984 |
|
SU1249531A1 |
| Устройство для LU-разложения матриц | 1986 |
|
SU1401478A1 |
| Устройство для решения дифференциальных уравнений | 1985 |
|
SU1310839A1 |
| Процессор для преобразования цифровых сигналов по Хааро-подобным базисам | 1987 |
|
SU1418745A1 |
| Устройство для вычисления рекуррентных соотношений | 1989 |
|
SU1683032A1 |
| Устройство для LU - разложения матриц | 1988 |
|
SU1661793A1 |
| Устройство для операций над матрицами | 1990 |
|
SU1737462A1 |
Изобретение может использоваться автономно или в составе многопроцессорных вычислительных машин для идентификации и управления быст- роизменяющимися объектами. Целью изобретения является расширение функ-t циональных возможностей устройства за счет увеличения порядка дифференциальных уравнений, описывающих идентифицируемые объекты, и увеличение быстродействия. Поставленная цель достигается тем, что устройство содержит две группы по п интеграторов каждая у где п - порядок дифференциального уравнения, описывающего иден- - тифицируемый объект, с первого по п-й регистры 2, матрицу 3 размером (п-1).п операционных элементов, первую и вторую треугольные матрицы 4 и 5 операционных элементов, группу 6 регистров. 6 ил. i СЛ О1 ЦЗиг.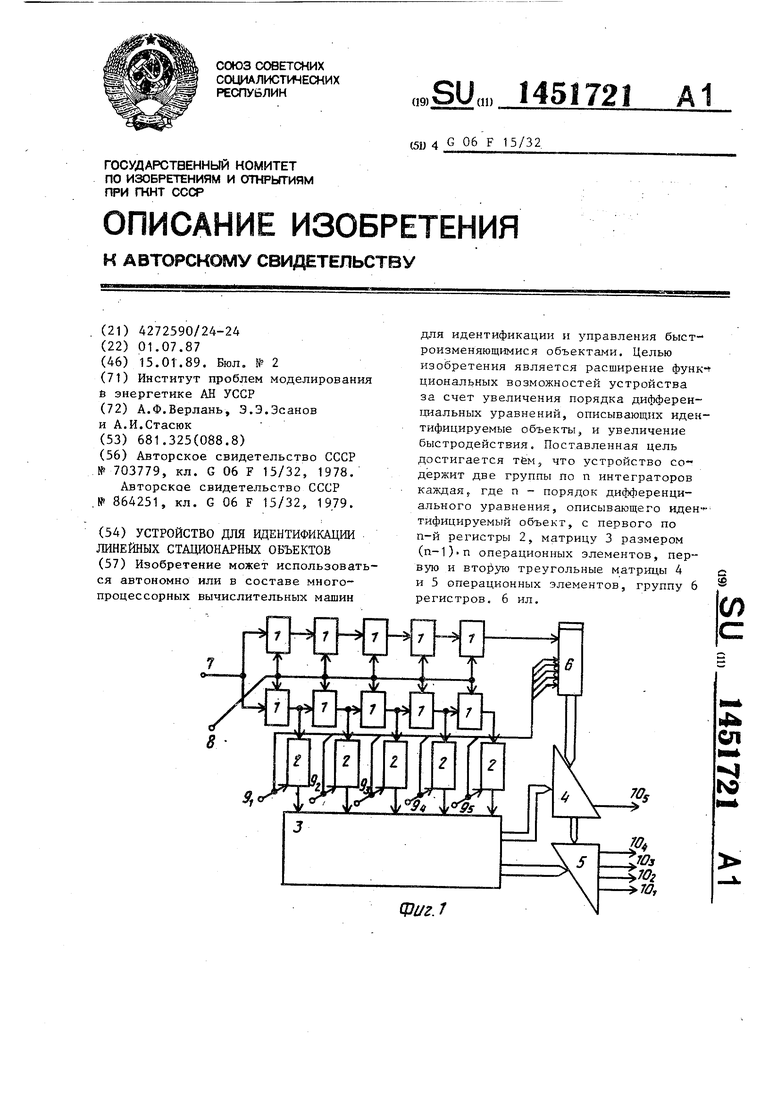
Фие.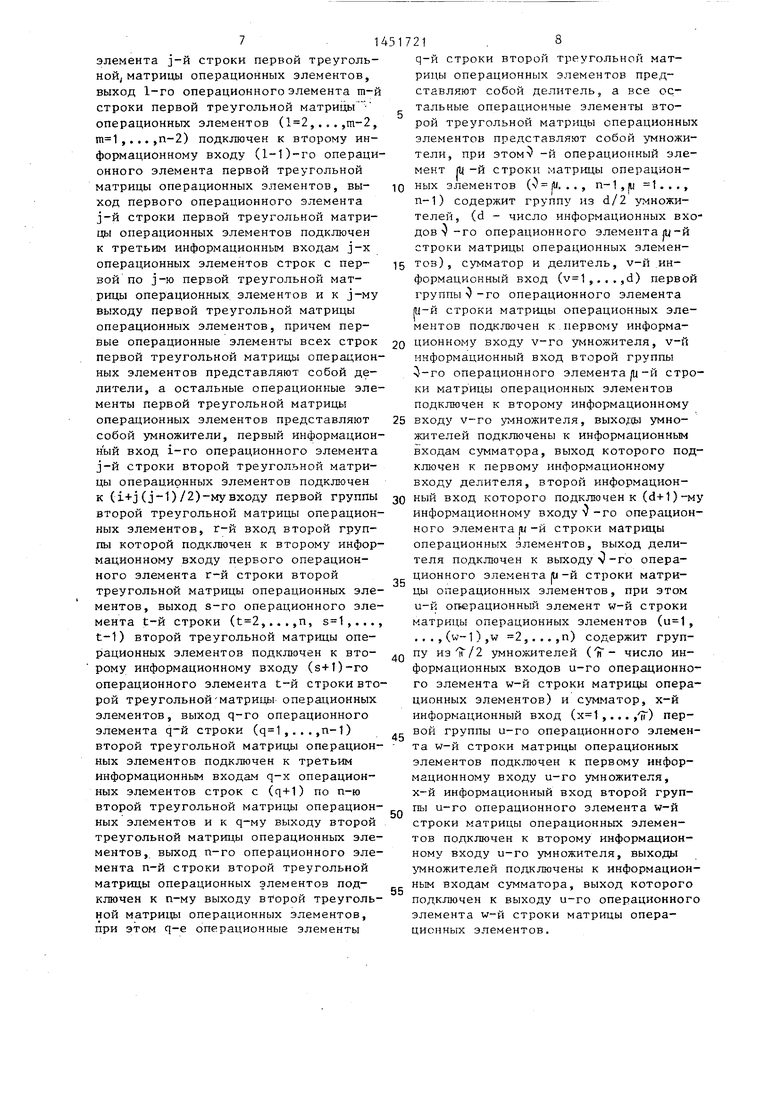
| Система индентификации параметров объекта | 1977 |
|
SU703779A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Устройство для измерения параметров линейных динамических объектов | 1979 |
|
SU864251A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
