(54) УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ЛИНЕ11НЫХ ДИНАМИЧЕСКИХ ОБЪЕКТОВ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения параметров динамических звеньев систем регулирования | 1978 |
|
SU930267A1 |
| Устройство для измерения параметров инерционных звеньев систем регулирования | 1980 |
|
SU949637A2 |
| СПОСОБ КОНТРОЛЯ ПАРАМЕТРОВ ЗВЕНЬЕВ СИСТЕМ УПРАВЛЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2156494C1 |
| Устройство для измерения параметров динамических звеньев систем управления | 1977 |
|
SU732823A1 |
| Устройство для измерения параметров инерционных звеньев | 1985 |
|
SU1269100A1 |
| СПОСОБ КОНТРОЛЯ ПАРАМЕТРОВ ЗВЕНЬЕВ СИСТЕМ УПРАВЛЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2133975C1 |
| Устройство для измерения параметров звеньев систем регулирования | 1978 |
|
SU711545A1 |
| Устройство для измерения параметров звеньев систем регулирования | 1985 |
|
SU1264141A1 |
| Устройство для измерения параметров инерционных звеньев систем регулирования | 1987 |
|
SU1418659A1 |
| Устройство для измерения параметров инерционных звеньев систем регулирования | 1976 |
|
SU622058A1 |
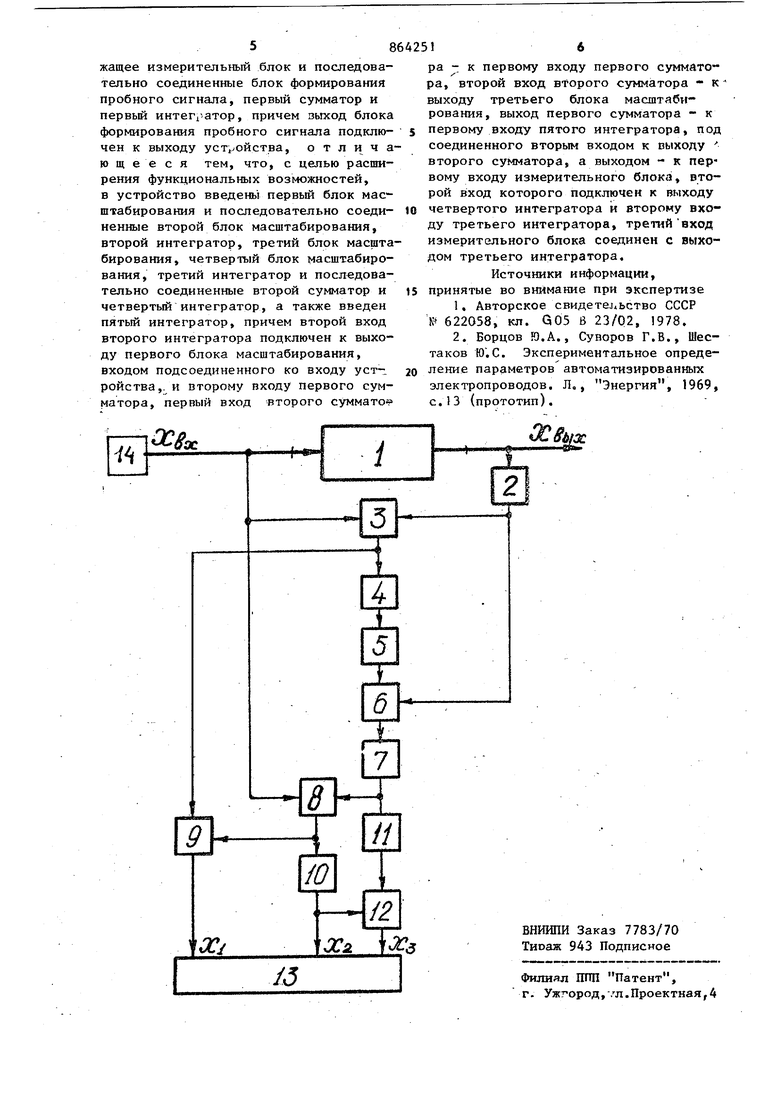
Изобретение относится к автоматическому регулированию и может быть использовано при идентификации объектов. Известно устройство для измерения параметров инерционных звеньев систем регулирования, содержащее первый интегратор, первый вход которого связан с первым входом устройства, измеритель ный блок, два блока масштабирования, второй интегратор и два блока деления напряжения, первые входы которых соединены с выходом первого и входом второго блоков масштабирования и вторым входом первого интегратора, выход которого подключен к первому входу второго интегратора, ко второму входу которого подключены выход второго блока масштабирования и второй вход первого блока деления напряжения, выход второрр интегратора связан «о вторым входом второго блока деления напряжения, выходы блоков деления напряжения соединены с соответствукнцими входами измерительного блока, а вход первого блока масштабирования связан со вторым входом устройства 1 |. Наиболее близким к предлагаемому является устройство для измерейия параметров инерционных звеньев систем регулирования, содержащее измерительный блок и последовательно соединенные блок формирования пробного сигнала, первьй сумматор и первый интегратор, причем выход блока формирования подключен к выходу устройства Недостаток этих устройств сострит в том, что с их помощью нельзя измерять параметры звеньев с передаточной функцией вида ) Р: a,. Цель изобретения - расширение функциональных возможностей устройства. Эта цель достигается тем, что в устройство введены первый блок масштабирования и последовательно соединенные второй блок масщтабирования, вто38рой интегратор, третий блок масштабирования, четвертый блок масштабирования, третий интегратор и последовательно соединенные второй сумматор и четвертый интегратор.и, кроме того, введен пятый интегратор, причем второй вход второго интегратора подключен к выходу первого блока масштабирования, входом подсоединенного ко входу устройства, и второму входу первого сумматора, первый вход второго сумматора - к первому входу первого сумматора, второй вход второго сумматора - к выходу третьего блока масштабирования, выход первого сумматора - к первому входу пятого интегратора, подсоединенного вторым входом к выходу второго сумматора, а выходом - к первому входу измерительного блока, второй вход которого подключен к выходу четвертого интегратора и второму входу третьего интегратора, третий вход измерительного блока - к выходу третьего интегратора. На чертеже изображена блок-схема устройства. Блок-схсма содержит исследуемое звено 1, первьм блок 2 масштабирования, первый сумматор 3, первый интег ратор 4, второй блок 5 масштабирования, второй интегратор 6, третий бло 7масштабирования, второй сумматор 8 третий и четвертый интеграторы 9 и 10, четвертый блок 11 масштабирования, пятый интегратор 12, измеритель ный блок 13,14, блок формирования пробного сигнала. Процесс измерения параметров состоит из двух операций: подготовки и собственно измерения. Подготовка осуществляется следующим образом. На. вход исследуемого звена подает ся единичный ступенчатый сигнал, 8установившемся режиме, изменяя коэффициент передачи блока 2 масштабирования, добиваются нулевого напряже ния на выходе сумматора 3. Возвратив схему в исходное состояние, вновь подают единичный ступенчатый сигнал на вход исследуемого звена, и в установившемся режиме, изменяя коэффициент передачи блока 5 масштабирования, добиваются нулевого напряжения на выходе интегратора 6 интегратор 6 переведен в пропорциональный режим работы ). Вновь возвратив схему в исходное состояние, подают единичный ступен.4 чатый сигнал на вход исследуемого звена и в установившемся режиме работы, изменяя коэффициент передачи блока 7 масштабирования, добиваются на выходе блока суммирования 8 нулевого напряжения (интегратор 6-работает в интегральном режиме), Вновь возвратив схему в исходное состояние, подают единичный ступенчатый cHrHajri на вход исследуемого звена и в установившемся режиме, изменяя коэффициент передачи блока 11 масштабирования, добиваются на выходе интегратора 5 нулевого напряжения (интегратор 5 переведен в пропорциональный режим работы), На этом подготовка оканчивается и производят собственно измерение параметров, Возвратив схему в исходное состояние и подав единичный ступенчатый сигнал на вход исследуемого звена, в установившемся режгме производят измерение параметров на выходе блоков 9,10,12 с помощью измерительного блока 1 3 , Используя правила структурных преобразований и учитывая, что исследуемое звено имеет передаточную функцию (1 ), можно показать справедливость изложенного. Изображения по Лапласу на выходе блоков 9, имеет вид ( а, вх Y +0-1 « . 9(Р) ciaP - a.pH Известно, что К («) Cimp Х(р), где X р - изображение оригинала х (-t) Тогда получим значения параметров )гЬ; X2(c),,Coo) случае, если измеряются параметры инерционного звена первого порядка, постоянная времени определяется на выходе блока 4, Предложенное устройство дает возможность измерять параметры звеньев вида (l), а также инерционных звеньев первого и второго порядков. Формула изобретения Устройство для измерения параметров линейных динамических объектов, содер
