Известны устройства для измерения глубины залегания р-«-переходов, содержащие термозонд, перемещаемый ло косому сечению образца и служащий для возбуждения термо-э. д. с., и электрический измерительный прибор для определения знака термо-э. д. с.
Предлагаемое устройство отличается от известных повыщенной точностью измерения. Это достигается тем, что в нем применены электромагнит, снабженный демпфером, служащий для поддержания постоянства давления зонда на образец и оптическая система для измерения угла косого сечения образца.
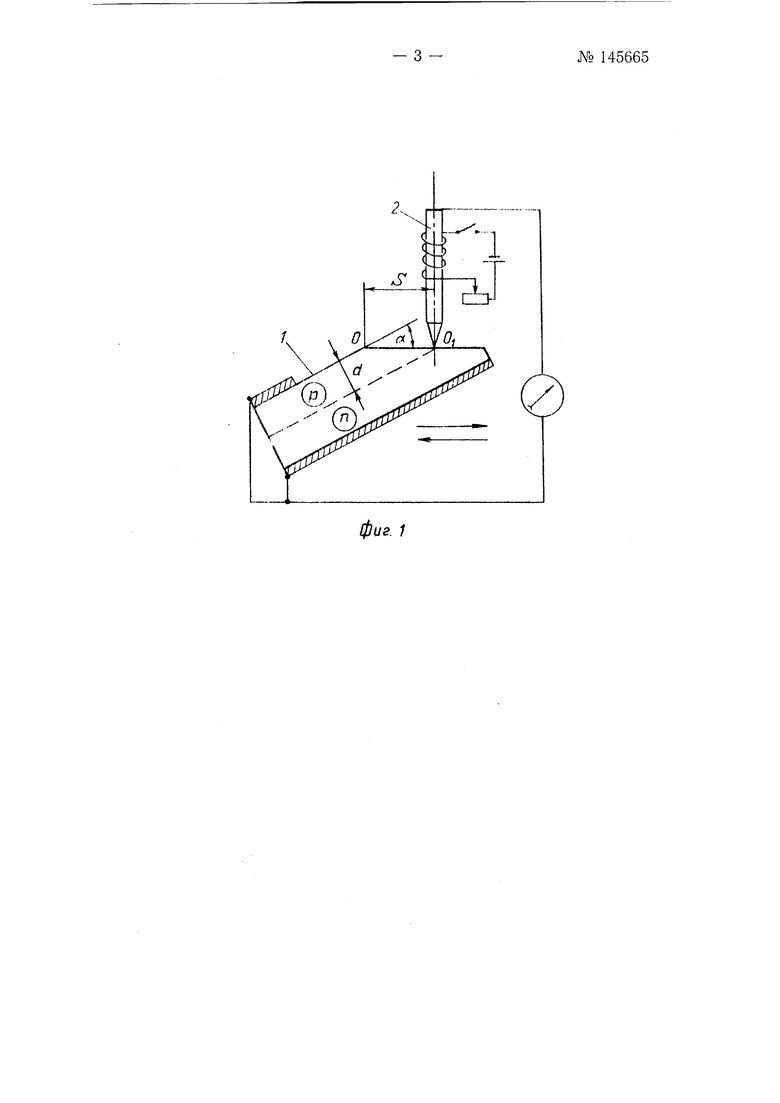
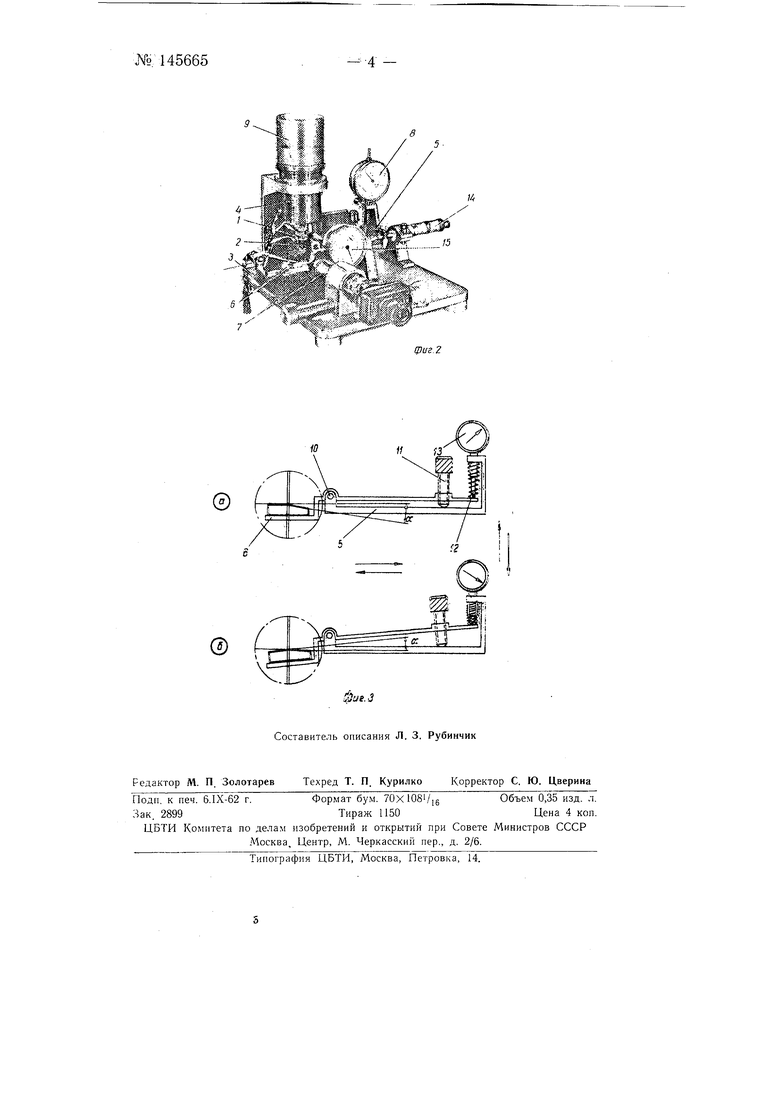
На фиг. 1 схематично изображен метод определения глубины залегания р-п-перехода, а на фиг. 2 и 3-соответственно фото и узлы предлагаемого устройства.
Измерение глубины залегания р-п-перехода производится на косом сечении образца / (фиг. 1) путем точного измерения угла среза а и расстояния 00 от ребра, образованного верхней гранью образца с плоскостью сечения, до места выхода перехода на поверхность. Граница между р-п-областями определяется по изменению знака термо-э. д. с. при перемещении нагретого зонда 2 по косому сечению.
Глубина залегания d определяется по формуле d Stga.
Устройство (фиг. 2) состоит из стальной плиты 5, на которой расположены нагреваемый зонд 2, укрепленный на сердечнике электромагнита 4, каретки 5 со столиком 6 для крепления образца, оптической системы 7 и электрического прибора для определения знака термо-э.д.с.
Термозонд 2 для подогрева снабжен электропечкой 5, питаемой от аккумулятора. При измерениях нагретый зонд 2 вводится в соприкосновение с образцом при помощи электромагнита 4, чем обеспечивается постоянство давления. С целью ослабления динамических нагру№ 145665- 2 зок и устранения опасности повреждения образца, применен воздушный демпфер 9.
Столик 6 (фиг. 3) с креплением для образца может поворачиваться на небольшой угол а вокруг оси W относительно каретки 5.
Поворот столика в вертикальной плоскости осуществляется специальным винтом /У и пружиной 12, угол поворота указывается индикатором 13, горизонтальное перемешение каретки 5 со столиком 6 производится микрометрическим виНтом 14 (фи-г. 2), а величина перемешения фиксируется индикатором 15.
Оптическая система 7, предназначенная для измерения угла косого среза образца, представляет собой тубус с объективом от микроскопа и окуляром.
Измерение глубины залегания р-п-перехода производится следующим образом. Исследуемый образец закрепляется на столике 6 каретки 5. С помощью винта // и микрометрического винта 14 верхняя плоскость образца подводится под горизонтальную линию перекрестья оптической системы 7, и по индикатору 13 производится первый отсчет (фиг. За)- Затем с этой же линией перекрестья совмещается плоскость косого сечения образца (фиг. 36). По разности отсчетов индикатора 13 вычисляется tg а.
Микрометрическим винтом 14 край среза образца подводится под острие зонда 2, начало отсчета фиксируется по индикатору 15. Затем каретка с образцом перемещается с по мощью того же винта 14, и при периодическом замыкан-ии кнопки питания электромагнита горячий; зонд вводится в соприкосновение с образцом и фиксируется знак тер-; мо-э. д. с.
Второй отсчет по индикатору 15 берется в точке изменения знака термо-э. д. с. Перемещая образец в ту и другую сторону несколько раз, повторяют измерения и для расчета принимают среднее значение полученных данных. Зная величину tga и расстояние OOi, легко определить глубину залегания р-п-перехода.
Устройство рекомендуется для внедрения на предприятиях, занимающихся разработкой и выпуском полупроводниковых приборов.
Предмет изобретения
Устройство для измерения глубины залегания р-п-переходов, содержащее термозонд, перемещаемый по косому сечению образца и служащий для возбуждения термо-э. д. с., и электрический измерительный при1бор для определения знака термо-э. д. с., отличающееся тем, что, с целью повышения точности измерения, в нем применены электромагнит с демпфером, служащим для поддержания постоянства давления зонда на образец, и оптическая система для измерения угла косото сечения образца.
фиг. 1
5
фиг.2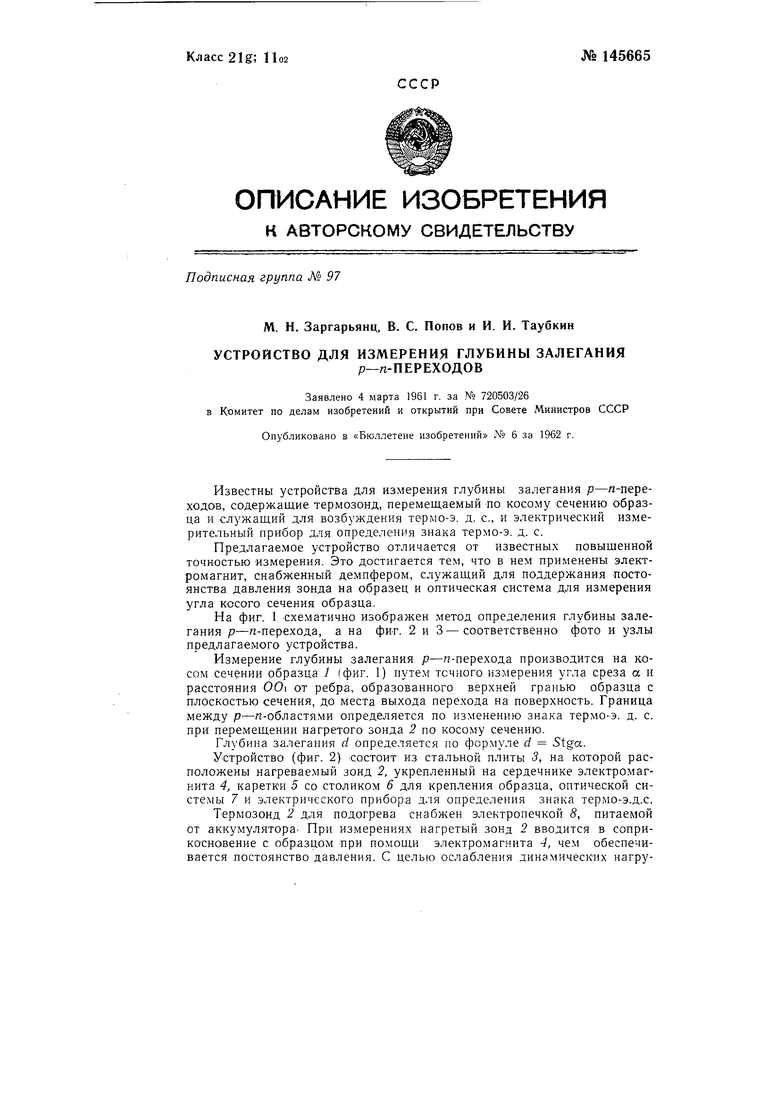
| название | год | авторы | номер документа |
|---|---|---|---|
| Электронно-зондовое устройство | 1988 |
|
SU1688303A1 |
| Устройство для измерения радиуса и угла сопряжения поверхностей деталей | 1981 |
|
SU1221486A1 |
| ЭХОЛОТ | 1997 |
|
RU2123191C1 |
| Устройство для измерения деформаций объектов | 1991 |
|
SU1796894A1 |
| Устройство для измерения трехмерных микрообъектов и изображений | 1983 |
|
SU1116865A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОХЛАЖДАЮЩЕЙ СПОСОБНОСТИ ЖИДКОЙ СРЕДЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1990 |
|
RU2039092C1 |
| ПРИБОР ДЛЯ ИСПЫТАНИЯ МЕРЗЛЫХ ГРУНТОВ ШАРИКОВЫМ ШТАМПОМ | 2012 |
|
RU2485474C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОЭФФИЦИЕНТА ДИФФУЗИИ ПРИМЕСНЫХ АТОМОВ В ПОЛУПРОВОДНИКЕ | 2009 |
|
RU2408952C1 |
| Устройство контроля остаточных напряжений | 1990 |
|
SU1783288A1 |
| Устройство для измерения индикатрисы источника излучения и рассеяния образцов при воздействии на них пучков излучения | 1990 |
|
SU1770771A1 |