f
т
- - /
,s
f
| название | год | авторы | номер документа |
|---|---|---|---|
| АКУСТООПТИЧЕСКИЙ ПРИЕМНИК | 1991 |
|
RU2007046C1 |
| ПЕЛЕНГАТОР | 1990 |
|
RU2006872C1 |
| СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ ПРИНАДЛЕЖНОСТИ НАЗЕМНОЙ ТЕХНИКИ И ВОЕННОСЛУЖАЩИХ К СТОРОНЕ-УЧАСТНИЦЕ ВОЕННЫХ ДЕЙСТВИЙ | 2010 |
|
RU2438143C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТА УТЕЧКИ ЖИДКОСТИ ИЛИ ГАЗА ИЗ ТРУБОПРОВОДА, НАХОДЯЩЕГОСЯ В ГРУНТЕ, И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2009 |
|
RU2411476C1 |
| Способ определения скорости распространения звука в среде и вектора скорости движения среды и устройство для его осуществления | 1983 |
|
SU1293492A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ КОММУНИКАЦИЙ | 1999 |
|
RU2180447C2 |
| Устройство для контроля и сигнализациипЕРЕМЕщЕНий Об'ЕКТА | 1979 |
|
SU842889A1 |
| Импульсный ультразвуковой расходомер | 1977 |
|
SU885808A1 |
| Устройство для считывания графической информации | 1974 |
|
SU525976A1 |
| ВЕРТОЛЕТНЫЙ РАДИОЭЛЕКТРОННЫЙ КОМПЛЕКС | 2009 |
|
RU2419814C1 |
Изобретение относится к контрольно-измерительной технике, а более конкретно к устройствам акустического контроля, и может быть ис-. пользовано для определения мест разрыва трубопровода, например, при аварии для определения координат точек трубопровода, например, при картографировании трассы, состояния трубопровода, степени заиленности, Целью изобретения является повышение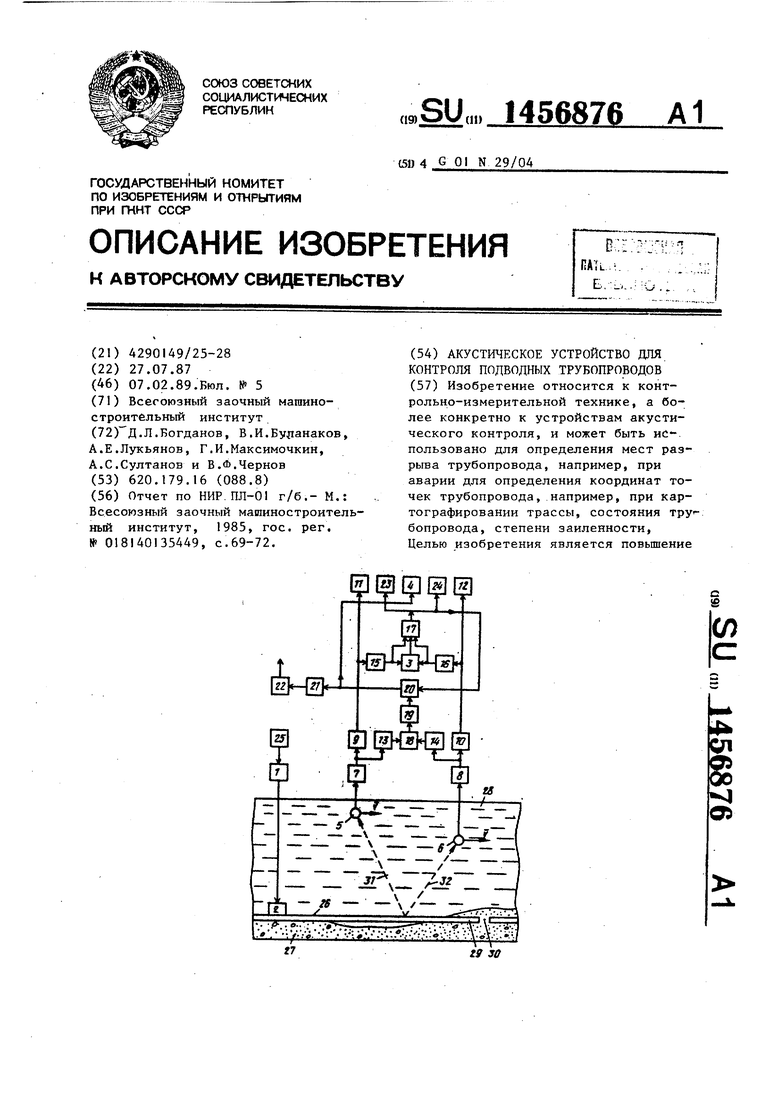
. .. % У л ::У пto М
точности и производительности контроля трассы подводного трубопровода за счет применения дифференциальног- фазового измерителя величины уклонения плавсредства с укрепленными на нем приемными электроакустическими преобразователями от линии трассы трубопровода и автоматизации определения момента прохода плавсредства над трубопроводом. Излучающий электроакустический преобразователь 2 возбуждает в трубопроводе 29 акустическую, волну. Принятые приемными электроакустическими преобразователями 5,6
1
Изобретение относится к контрольно-измерительной технике, а более, конкретно к устройствам акустического контроля, и может .использоваться для определения места разрыва трубопровода, например, при аварии, для определения координат точек трубопровода, например, при картографировании трассь), состояния трубопровода, степени заиленности.
Целью изобретения является повышение точности и производительности контроля трассы подводного трубопровода за счет применения дифференциально-фазового измерителя, величины уклонения плавсредства с укрепленными на нем приемными электроакустическими преобразователями .от линии трассы трубопровода и автоматизации определения момента прохода япавсред- ства над трубопроводом.
На чертеже представлена блок-схема акустического устройства для контроля подводньпс трубопроводов.
Устройство содержит последовательно соединенные генератор I синусои- дального напряжения и излучающий электроакустический преобразователь 2, предназначенный для закрепления на участке контролируемого трубопровода с известными координатами, блок 3 сравнения и первый индикатор 4, и два канала приема и обработки сигналов, каждый из которых выполнен из последовательно соединенных приемного электроакустиче :кого преобразователя 5 (6), усилителя .7 (8),- перамплитудно-нодулированные сигналы поступают на детекторы .9,10, с выхода которых при равенстве их амплитуд - на третий и четвертый индикаторы 23, 24. Фазометр 18 осуществляет сравнение фаз огибающих сигналов с выходов детекторов 13 и 14 первого и второго каналов приема и обработки сигналов. При равенстве фаз нуль-орган 19 через вторую схему И 20 и генератор 21 .,меток запускает формирователь 22 импульсов, вырабатывают щий импульсы запуска пеленгатора. 1 ил.
0
5
вого детектора 9 (10) канала приема и второго .индикатора 11 (12), приемные электроакустические преобразователи каждого из каналов приема и обработки сигналов смонтированы на заданном расстоянии один от другого и предназначены для перемещения в толще водоема вдоль его поверхности, в каждом из каналов приема и обработки сигналов второй детектор 13 (14), вход которого подключен к выходу усилителя 7 (8) того же канала, амплитудный дискриминатор 15 (16), вход которого подключен к выходу детектора 9 (10) соответствующего канала, и общие для обоих каналов первый элемент И 17, первый и второй входы которого объединены с соответ- ствующими входами блока 3 сравнения и подключены к выходам амплитудных дискриминаторов 15 и 16 соответствующего канала, третий вход подключен к выходу блока 3 сравнения, последова5 тельно соединенные фазометр 18, вый и второй входы которого подклю - чены к выходам вторых детекторов 13 и 14 соответствующих каналов, нуль- орган 19 и второй элемент И 20, вто рой вход которого подключен к выходу первого элемента И 17, генератор 21 меток времени и формирователь 22 импульсов, выход которого предназначен для подключения к входу запуска пеленгатора для определения местопо5 ложения и текущих координат приемных электроакустических преобразователей 5 и 6 (точнее координат плавсредства.
на котором размещены последние).третий 23 и четвертый 24 индикаторы, подключенные к выходу первого элемента И 17 и второй генератор 25 си нусоидального напряжения, выход котрого подключен к входу модуляции амплитуды первого генератора 1 сину соидального напряжения, а выход второго элемента И 20 подключен к вход первого индикатора 4.
Кроме того, на чертеже показаны контролируемый подводный трубопровод 26, лежащий на дне 27 водоема 28,заиленный участок 29 трубопровода, разрыв 30 трубопровода. Позициями 31 и .32 условно показаны акустические пути от трубопровода 26 до движущихся со скоростью V приемных электроакустических преобразователей 5 и 6.
Акустическое устройство для контроля подводных трубопроводов работает следующим образом.
Излучающий электроакустический преобразователь 2 устанавливают на участке контролируемого трубопровода 26 с известными координатами на дне или на поверхности водоема на участке, выходящем на берег или эстакаду. Приемные электроакустические преобразователи 5 и 6 монтируют на заданном расстоянии порядка 5-8 м . (по бортам плавсредства).. С помощью второго генератора 1 синусоидального сигнала получают промодулированный по амплитуде сигнал с несущей в ультразвуковом диапазоне частот (порядка 20-50 кГц). На несущую сигнала настроены первые детекторы 9 и 10. Приемные электроакустические преобразователи перемещают вдоль трассы трубопровода, корректируя курс плавсредства по показаниям первого, второго, .. третьего и четвертого каторов соответственно 4, II и 12 23, 24.
При подходе к зоне расположения трубопровода приемные электроакустические преобразователи 5 и 6 принимают акустический модулированный сигнал, излучаемый трубопроводом в окружающую среду. Трубопровод возбуждается излучающим электроакустическим преобразователем 2. Электрические сигналы с выходов приемных преобразователей .5 и 6 усиливаются усилителями 7 и 8 и поступают на входы первых 9 и 10 и вторых 13 и 14 детекторов. Первые из них вьщают
1456876
10
15
20
сигналы, определяющие уровень сигнала, принятого приемными преобразовав телями, и поступают на вторые индикаторы 11 и 12, в качестве которых могут использоваться световые индикаторы или наушники. По наличию свечения индикаторов или звукового сигнала в наушниках добиваются грубой корректировки курса плавсредства.
Далее, учитьгоая разницу в показаниях сигнала вторых индикаторой 11 и 12 (при использовании наущников), .используя бинауральный эффект, корректируют курс, стараясь выполнить условие равенства сигналов на вторых индикаторах Ми 12. При достижении- их равенства получают сигнал логической I одновременно на всех трех входах первого элемента И 17. На первый и второй входы поступают сигналы с выходов амплитудных дискриминаторов 15 и 16, свидетельствующие о нали- чии принятого акустического сигнала 25 не равного нулю. На третий вход элемента И 17 поступает сигнал с выхода элемента 3 сравнения лишь в том слу-, чае, если разница сравниваемых сигналов по амплитуде оказывается мень- 30 ше некоторой заданной величины. При формировании сигнала с уровнем ческой. М на выходе элемента И J7 срабатывает третий индикатор 23 и для удобства симметрично расположен- 25 ный на панели четвертый индикатор 24; что свидетельствует о более тонкой корректировке курса плавсредства относительно трассы трубопровода. Мак-., симальное уклонение в этом случае 0 все еще составляет 6-8 м, что в ряде случаев недостаточно.
Дальнейшая более точная корректиг ровка осуществляется по показаниям первого индикатора 4, связанного с 5 фазометром 18 через нуль-орган 19 и второй элемент И 20. Сигналы низкой частоты с выходов вторых детекторов 13 и 14 поступают на соответствующие входы фазометра 18. При достижении разности фаз в обоих каналах, равной нулю, срабатывает нуль-орган 19 и сигнал с ...его выхода через второй элемент И 20, открытый сигналом с выхода первого элемента И 17, запускает первый индикатор 4 и генератор 21 меток времени, что соответствует наиболее точному совмещению курса плавсредства с трассой трубопровода. В этом случае по сиг 0
5
5
налам генератора 21 меток времени срабатывает формирователь 22 импульсов, вырабатывающий импульсы запуска пеленгатора для определения мес- тоположения и текущих координат искомой трассы трубопровода.
При проходе участка трубопровода с разрывом 30 наблюдаются одновременная потеря (спад амплитуды) акустического сигнала в обоих каналах и одновременное выключение всех индикаторов 4, И, 12, 23 и 24, так как при этом закрываются элементы И 17 и 20, Генератор 21 меток времени выключается, а о координатах дефекта (разрыва трубопровода судят по последнему пеленгу, выданному устройством с выхода блока 22 формирователя импульсов.
О наличии заиленных участков трубопровода и их степени (мощности пластов заноса) судят по величине амплитуды сигналов на входах вторых индикаторов 11 и 12 при расположении
14
плавсредства над трубопроводом (в мо- 25 тотного синусоидального сигнала, вы- мент выдачи сигнала пеленга). Резкое снижение амплитуды сигнала может быть связано с вхождением трубопровода в отложения, песок, ил.
Изобретение обеспечивает повыше- 30 ние точности и производительности контроля, что достигается за счет выполнения схемы ,на базе дифференциально-фазового измерения величины уклонения плавсредства с укрепленны- ц ми на нем приемными электроакустическими преобразователями от трассы трубопровода и автоматизации в определении момента прохода плавсредства над трубопроводом.40
Ф о рмула изобретения
Акустическое устройство для контроля подводных трубопроводов, содер- 45 жащее последовательно соединенный генератор синусоидального напряжения и излучающий электроакустический преобразователь, предназначенный для
ход которого подключен к входу модуляции амплитуды первого-генератора синусоидального напряжения, вход второго детектора каждого из каналов приема и обработки сигналов подключен к выходу усилителя того же канала, вход амплитудного дискриминатора каждого из каналов подключен к выходу первого детектора этого же канала, первый и второй входы первого элемента И объединены с соответствующими входами блока сравнения и подключены к выходам амплитудных дискриминаторов соответствующего канала, а третий вход подключен к выходу блока сравнения, первый и второй Bxoi- ды фазометра подключены к выходам вторых детекторов соответствующих каналов, второй вход второго элемента И подключен к выходу первого элемента И, выход формирователя импуль - сов предназначен для подключения к входу запуска пеленгатора для определения места положения и текущих ко
568766
приемного электроакустического преобразователя, усилителя, первого детектора и второго индикатора, прием- ные электроадсустические преобразовав тели каждого из каналов, приема и обработки сигналов смонтированы на заданном расстоянии один от другого и предназначены для одновременного
10 перемещения в толще водоема вдоль .. его поверхности, о тлич ающее- с я тем, что, с целью повышения точности и производительности контроля трассы подводного трубопровода,
15 оно снабжено в каждом из каналов приема и обработки сигналов вторым де- тектором, амплитудным дискриминатором и общими для обоих каналов первым элементом И, последовательно сое20 диненными фазометром, нуль-органом, вторым элементом И, генератором меток времени и формирователем импульсов, третьим и четвертым индикаторами и вторым генератором низкочастотного синусоидального сигнала, вы-
ход которого подключен к входу модуляции амплитуды первого-генератора синусоидального напряжения, вход второго детектора каждого из каналов приема и обработки сигналов подключен к выходу усилителя того же канала, вход амплитудного дискриминатора каждого из каналов подключен к выходу первого детектора этого же канала, первый и второй входы первого элемента И объединены с соответствующими входами блока сравнения и подключены к выходам амплитудных дискриминаторов соответствующего канала, а третий вход подключен к выходу блока сравнения, первый и второй Bxoi- ды фазометра подключены к выходам вторых детекторов соответствующих каналов, второй вход второго элемента И подключен к выходу первого элемента И, выход формирователя импуль - сов предназначен для подключения к входу запуска пеленгатора для определения места положения и текущих ко
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| per | |||
| № 018140135449, с.69-72. | |||
