й ел
00
ю
о
со
;убматыя 7, (i (сум:е;гт Г)лиется -овор(гг стойки 5 с г--сх;| ; ч r:cr:ni; Г У 1 ОЙ 16 м .схпптон. П Г ПР.--очп ; прлТаТ( ЧСТП ИЛЧИИЛРТСЯ (. -iPni rMSlO
иим;л 11 п п Ц1 е- гя ус ;-1М е |;ук1 , Дим рлгпкип.п: ;-- ;м-:рР ; М ;,г;пия 
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для моделирования систем дифференциальных уравнений | 1973 |
|
SU481041A1 |
| Станок для шлифования и полирования каменных облицовочных плит | 1950 |
|
SU88271A1 |
| Система управления гелиостатами | 1982 |
|
SU1149210A1 |
| Приспособление к волочильному стану для впрессовывания концов прутков в фильеру | 1945 |
|
SU70117A1 |
| Способ изготовления изделий типа крюков с хвостовиками и устройство для его осуществления | 1980 |
|
SU941011A1 |
| Станок для автоматической отрезки и разделки концов проводов и кабелей | 1956 |
|
SU113336A1 |
| Установка для изготовления индикаторных трубок | 1986 |
|
SU1373696A1 |
| Способ получения тримеров и тетрамеров пропилена | 1989 |
|
SU1609065A1 |
| Способ выверки технологического оборудования | 1986 |
|
SU1430752A1 |
| Устройство для пеногашения | 1986 |
|
SU1428413A1 |

Изобретение относится к области мапгиностроения, а именно к промышлен- ны роботам для загрузки-разгрузки технологического оборудования. Целью изобретения является уменьшение погрешности позиционирования за счет снижения момента инертдаи поворотных узлов. При включении привода 8 через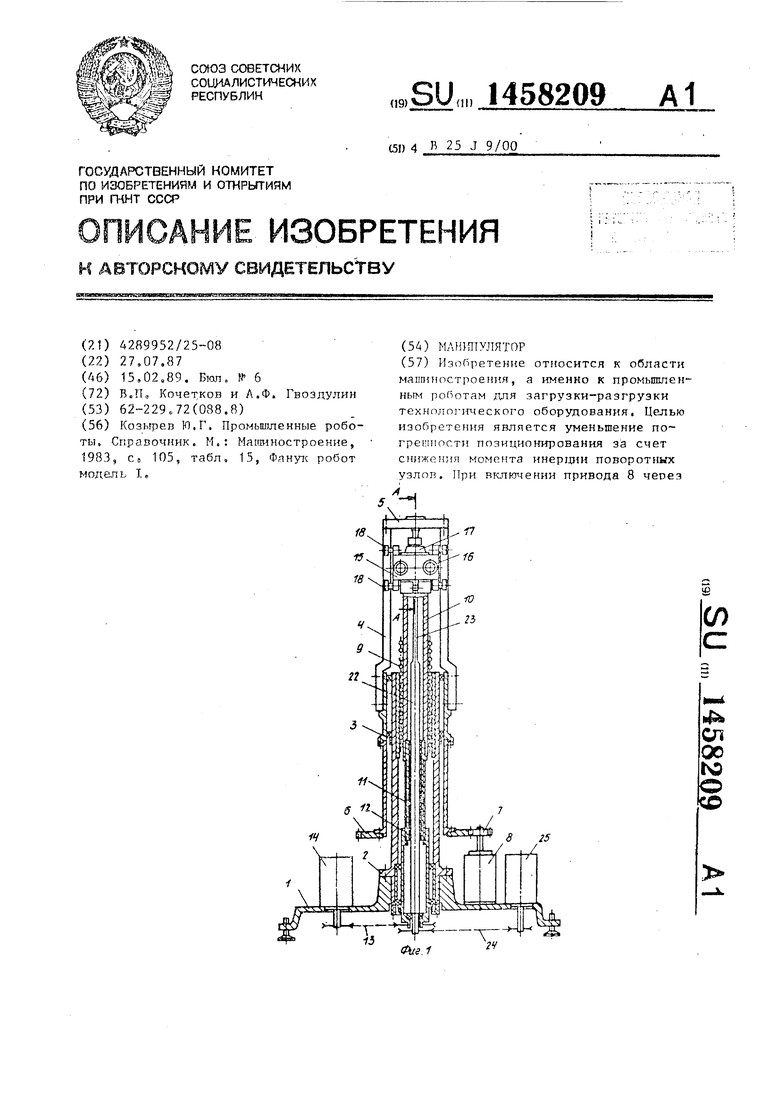
т чэда 14 чере 1 г Пбкую стп1: , i . пр идс --слулят ii :iino. ,-15, 5 ич,
пне Tiepo/in 15гс:и H;I raincy 2j- 1и; ул 1-ИзобрСП еИПС к МЙШИ О-гтроетиш, а темени.- к TiovM-iiiine IMIJ-U.; роботам для лП) ру: К --рач г)у:)- чтх-- Т ологпчG( KoPf) оГ) - :i .:
IlGjjbio ii3Oope i4;i jiii п.; гс;: умпнт, лтение пог решиостп ио лиг -п-р H ni за счет снижагия -1п; Г Ч ш ер дни поТН фОТНЫХ УЗЛОЛ,
На фиг, 1 cxQr:a ГИЧЧ10 i:peA.:- vnijie i манипулятор; на фиг, 2-- .льзрвз па. фнг,„ 1; на фиг „ 3 - 5.ачге;: па фиг J 2 ,
Манш тулятор ао/тержкт пспогкание i и закрепленпу о на iier-s вр.ртикглУзяую колонну 2, с.ларул;и котороГ н;; iiojv шиппиках рлсл(;ло-кя;;я лО11Ор() Глпя crr ::« с эйК1 -е1тле1П и П1 на исрхжгм мас тч л,))уг-Л г л;1;;| а1.:л s, м srb MiiUjiMH лерсмьглкоп ). ii;; счгике ш ;;|и;ллсчс.1 )у(1латоо KOJieco С)., 1Л1-ил i i ичлс ivu вязалиос ; с яупча гыь; : KI.MI-- }ода мехплпч ;;1 8 полором рукг-г, ; 1НГ1леи1ияч па ( лг-: 1,
Биутрм CTOf-nni i л агл КЛ1Л i7ii: liu«: -- )Ээме1 -еи . л на которое уптгл( :а смоятирО11а)1иая v; 1л 11;Г11л ;чкак н к-л- 2 и ;1пклч7лггч ;С кл :л- лзаллап
слизью с ЛРИЛГ)ЛС,-- 1 НС-Х;;имзма , рукИ; шт;; :;л.лл Л1ыи на осиог;ам и .1 „
На верх лей час и ;0 .а1 ; СИ пена сарРтка i, i:a ко1лл:ол ;;стаиоп пена мсхат чло с кл п Г : :; - корпус;
17 с ПОЛОрг ТЛЛГ: |П УЛ чО( С р ОЛПКОВЫ
ми опорами |Н, 1азме1 ел ;ь И iia эксцентриках 1 . 11,4 ГЛГУЛ СС )G iJH3Ha
звездочка 20 и р|;1ли1 г1ОГ1(Л)Ы 21 на /)ксцеитрлк; х ,
Т иутрл - у,. ла лкях ра меп си р/ .ч .. , ти шллпы 2 .
тактпр.лпг i :-.:-л лл-м ч а1 ч / I а л г-м. -its io-ii (л;:. 2ч
2
ciiiiv fui с ггррпш.лом 25 радиалтл сллт ru: рглллцоиия pyjc,, устаиоплй П Ь ;- ла л; ;1онпл11 г „ рука 16 ;Л)Гполлела TI ЛМЛ.Г ллул 26,. ( холцсл лял-.- .-лл- лыл ла каретке iS, а другим -- ус: га - ),пых в корпусе редуктора 2. вы lio.KiieH K ro pa (п-лематическн слп ллд} ух i:)pe: ( 29 г омспе:нных liHyn ; : УО 26 на ро.- и :опь;х опорах 30 с nKCL.oFi i - рикамп Si снаружи скроплслньп ; т еремь ко; 31 С 32, На ол:ном i-x; з Пл:ат1:1Х ко; ;ес аакреллела заладг i;- 33 „ которая гЛ бкой спязг ю З : (лллл / л1 со злсздочкой 20,
iaи ilTyл лi Л1 л. лотг: trr -.(лусл :;п -i гч; лаг С)н„
V piii.rxi В л , . ,.
5 lerica ;лл15 лл ):л ЛЛ Ь i .i л лкопа л :/. ;; г 1:ЛГй гку л л | ;ль:С i t с такреплслпл л п 1ЛЛ-: руул )л 1 (| и с:хнатом 32, ф -л-д i с I ir -.oru/ глбгтон слязк 13 лл ла Л
:ЛГ:Л :у ,, а. Г .ОГЛр ЛЖе л , с Л:Г ЛУС.
;C,:-ii; 11,, ; лер::(и заясь ; л :лллл; ло л р;Л 1л;ооги рям)-1 18, лереллщл;;- т лаг:рлл,1лт;о1 пй-) г; лгккальио г;ус лл.лл;-:, /л л ;() Б:- 1ес; л; с кар гплсол 5 :- леплой я рукой ;Л: Прияол. 2:: лог,:о|-ллг гибкой слязи 24 :вра1 лкл, ix.- лот орыл ;ллл- Л1 иилодами 23 i, лоЛ Лц. ;Л ,глг;-ллЛ1О1) 2| говора ив;усг . ку 20,, :л ллл1лслл-гу1и с;;я:-;л;г г ::л ;плздол 53, ирл лтоь л- -- л,л | 1 адипльгл:)е г еремешеииб рукл. Пр лолг ;оте рукн 16 от В -i ;-- по,лг 14 и 25 должны быть ралго1л. лг: для тил;дотиращения обкатывалг;- алр люлки 20 и 12„, чем - я г т г:я с ; копро -: ол ь н:ое эыдтл зка f лгs
i; r-i ViV7: M Г; f-ЮМеНТ ОЗОрСТ ,
-. о р ь у л а и 3 с 5 р е г л .
Mat лл -л trrfni 5 содержа: гий ;- лг ггпрпгагл ую па He--. 1юворол г;-;с
стойку с кареткой, мехяиимескук руку со охватом, установленную ня кпрет- ке, механизмы попорота н радил.пыют о перемещения руки, механизм руки типа винт - гайка, и приводы этих механизмов, о т л и ч а ю щ и й- с я тем, что, с пелью уменьшения погрешности позиционирования за счет снижения момента инерции поворотных злов, привод механизма под7эема ру- Хи кинеь1ати-чески связан с гайкой, и винт вьтолнен nycTOTejni. M, а механизм радиального выдвиже ия руки выполнен в виде закрецлеююго на каретке корпуса, размещенньк в )ем поворот1гой
Б-Б
V76 629/
дЖта I.,,,/,, /
р4 : : а: : г1зД| пА
- - , t, X- V vA SA- -Г V „
:гг:У1 г- ::г -г7 7-7- 7-7-7-7-т- j j TIT i Уi ЛуОСА-ОчУ-- -: .- v,- -:--i
DTv. iKi с 11(1. 1ИК( Г1Ыми cinopanu и гряя;п1 ио1- 1 (- пти ч И (прлм1г 1аг1ице ого вяла и смсиггирорянной ня руке зубчлто- реечной передачи, состоящей из двух зубчатых реек и. двух зубчатых колес, каждое из которых находится в зацеплении с соответствующей рейкой, при этом зубчатые колеса кинематшгески
связаны с поворотной втулкой, ггшкце- вой вал размещен в пустотелом винте и кинематически связан с приводом pajuia. ibHoro перемещения руки, причем прин1 Ь1 меха)1измов подъема и радигшьного иеремсгпения руки смонтированы на основании.
А-А
J
J/ 22
| Козьфев Ю.Г | |||
| Промышленные роботы | |||
| Справочник | |||
| М.: Магаиностроение, 1983, с, 105, табл, 15, Фанут робот модель Т.. |
