1
Изобретение относится к сменным грузозахватным органам и может быть использовано в составе любого грузоподъемного средства для подъема, транспортировки и складирования грузов из ферромагнитных материалов.
Целью изобретения является повьте- ние эксплуатационных качеств.
На фиг. 1 показано предлагаемое магнитное устройство во включенном положении, поперечньш разрез (пунктиром показаны пути замыкания магнитного потока); на фиг. 2 - последовательность выключения устройства; на фиг. 3 - магнитньй держатель, вид сбоку.
Магнитньй держатель содержит П- образньй магнитопровод, состоящий из боковых пластин 1 и перемычки 2, образующих корпус устройства. К внутренним поверхностям пластин 1 примыкает пара магнитов 3, намагниченных встречно. Между магнитами расположен подвижной наконечник, состоящий из частей 4 и 5 с пальцами 6 и 7, которые независимо друг от друга могут перемещаться вдоль поверхностей полюсов магнитов, занимая крайние положения между перемычками 2 и ферромагнитной поверхностью 8. При этом пальцы 6 и 7 выходят через прорези 9 в боковых пластинах П-образного магнитопровода. Перемещение частей подвижсд
00. 00
ного наконечника осуществляется с помощью двух пар кулачков 10 и 11, име кщих ручки 12. Б каждой паре кулачк жестко кинематически связаны между собой посредством зубчатого колеса 13. На полюсах П-образного магнито™ провода установлены цилиндрические башмаки 14 и 15, обеспечивающие контакт полюсных поверхностей устройства с плоскими и цнпиндрическими ферромагнитными поверхностями 8 любого диаметра.
Устройство работает следутощим образом.
В исходном положении (фиг. 3) обе части 4 и 5 подвижного наконечника находятся в контакте с перемычкой 2. При этом магнитный поток, созданньй постоянными магнитами 3 и обеспечивающий сиги тяжения, развиваемые устройством, замкнут внутри магнитной систет ы, проходя, как показано пунктиром, по магнитам 3, боковым ппастинам-магнитопроводам 1, перемычке 2, частям 4 и 5 подвижного наконечника. В этом положении устройство выключено. При установке устройства на ферромагнитную поверхность 8 с помощью кулачков IО и 11 перемеща- киг до соприкосновения с поверхностью 8 сначала одну из частей 4 или 5 подвижного наконечника провода (фиг. 2), обеспечивая таким образом путь для магнитного потока через ферромагнитную поверхность 8. При этом шунтиру- кядая цепь, замыкающая магнитный поток по перемычке 2 сохраняется. Это означает, что перевод магнитной системы из положения Вьшлюнено в положение Включено происходит без изменения энергии магнитной системы, а
1
1458307
следовательно, без сопротивления магнитной системы переключающему воздействию. Далее в соприкосновение с поверхностью 8 приводят вторую часть подвижного наконечника (фиг. 1), что также происходит без заметного сопротивления магнитной системы. В положении, показанном на фиг. 1 магнитная система полностью включена. Выключение устройства выполняют в обратной по с л едо в ате ль но с ти.
15
Формула изобрете
н и я
Магнитное подъемное устройство, содержащее корпус, представляющий собой П-образньй магнитопровод, внутри которого закреплены два постоянных 20 магнита, намагниченных встречно, и установленный подвижно в вертикальной плоскости между магнитами полюс- ньй наконечник и привод перемещения наконечника, отлич, аюшееся
25
ч, а ю щ
тем, что, с целью повьпиения эксплуатационных качеств, на боковых стенках магнитопровода установлены полюсные башмаки с цилиндрической рабочей поверхностью, радиус которой выполнен
30 не менее толщины боковой стенки, полюсный наконечник выполнен из двух равных по высоте смежных в продольной плоскости частей, при этом привод перемещения наконечника вклю2g чает в себя установленные жестко на его частях по два горизонтальных пальца и по два кулачка, установленных на соответствующей стенке магни- топровода и кинематически соединенных
40 между со бой для синхронного поворота и выполненных с криволинейным пазом для соответствующего пальца.
12
fJu2.1
фи.2
12
iO
x/V

| название | год | авторы | номер документа |
|---|---|---|---|
| Магнитное грузозахватное устройство | 1982 |
|
SU1122600A1 |
| МАГНИТНОЕ ПОДЪЕМНОЕ УСТРОЙСТВО | 1991 |
|
RU2014279C1 |
| Устройство управления электрическим механизмом | 1988 |
|
SU1721652A1 |
| МАГНИТОВОЛНОВОЙ ФРИКЦИОННЫЙ ВАРИАТОР (ВАРИАНТЫ) | 1997 |
|
RU2138709C1 |
| РЕЛЬСОВЫЙ ТОРМОЗ С ПОСТОЯННЫМИ МАГНИТАМИ | 2000 |
|
RU2185984C2 |
| Магнитоэлектрический захват груза | 2022 |
|
RU2797934C1 |
| Магнитный захват | 1988 |
|
SU1585271A2 |
| Устройство для измерения крутящего момента | 1977 |
|
SU708183A1 |
| Генератор маховичный | 2017 |
|
RU2687242C2 |
| СПОСОБ, СИСТЕМА И АППАРАТ, ИСПОЛЬЗУЮЩИЕ ВЫСОКОЭНЕРГЕТИЧЕСКИЕ ПОСТОЯННЫЕ МАГНИТЫ ДЛЯ ЭЛЕКТРОМАГНИТНОГО ПЕРЕМЕЩЕНИЯ, ТОРМОЖЕНИЯ И ДОЗИРОВАНИЯ РАСПЛАВЛЕННЫХ МЕТАЛЛОВ, ПОДАВАЕМЫХ В ЛИТЕЙНЫЕ МАШИНЫ | 2000 |
|
RU2256279C2 |

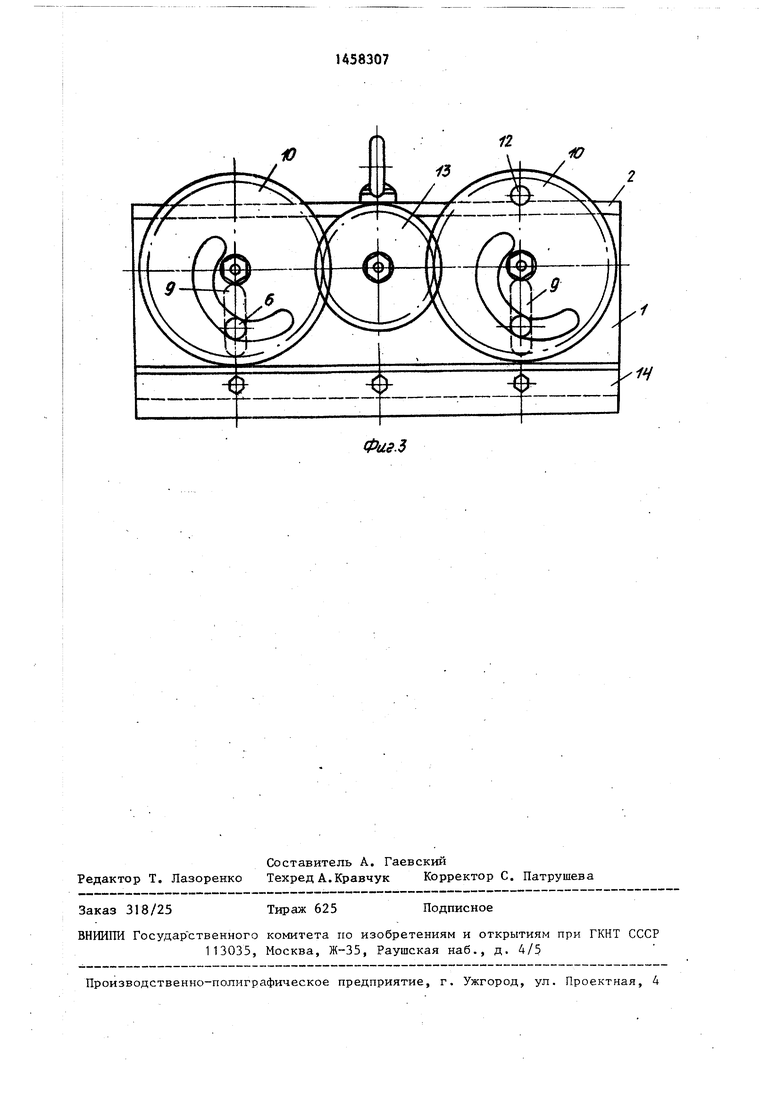
Изобретение относится к магнитным грузозахватным устройствам, используемым при складировании и транспортировке грузов из ферромагнитных материалов. Цель изобретения - повышение эксплуатационных качеств. Магнитный держатель содержит П-образный магнитопровод, состоящий из боковых пластин 1 и перемычки 2, к внутрен.-. ним поверхностям магнитопровода примыкает пара магнитов 3, намагниченных встречно. Между , магнитами расположен подвижной магнитопровод, состоя- . щий из частей 4 и 5, которые независимо друг от друга могут перемещаться, занимая крайние положения между перемычкой магнитопровода и ферромагнитной поверхностью 8. Перемещение частей по движного магнитопровода осуществляется с помощью двух кулачков 10 и 11. На полюсах П-образного магнитопровода установлены цилиндрические полюсные башмаки 14 и 15 с радиусом цилиндрических поверхностей не менее толщины боковой пластины П-образного магнитопровода. 3 ил. (Л
Составитель A. Гаевский Редактор Т. Лазоренко Техред А.Кравчук Корректор С. Патрушева
Заказ 318/25
Тираж 625
ВНИИПИ Государ ственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Фи$.5
Подписное
| Магнитное подъемное устройство | 1985 |
|
SU1237598A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
