Предлагаемое изобретение относиться к магнитным грузозахватным устройствам с постоянными магнитами и может быть использовано для захвата, длительного удержания и транспортирования с последующим отпусканием ферромагнитных и немагнитопроводящих грузов в робототехнических устройствах различного назначения, в частности в автоматических управляемых устройствах с автономным источником питания.
Известен грузоподъемный захват на постоянных магнитах [патент RU 116137], предназначенный для захвата, удержания, транспортирования и освобождения (отпускания) ферромагнитных грузов, содержащий корпус, с размещенными в нем постоянными магнитами, и поворотный элемент включения и выключения магнитов. Захват и освобождение груза, а также регулировка усилия притяжения захвата осуществляется за счет изменения угла поворота поворотного элемента при помощи механизма привода. Механизм привода, размещенный в верхней части захвата и соединенный кинематической связью с поворотным элементом, выполнен в виде электропривода с мотор-редуктором, шаговым электродвигателем или серводвигателем.
Недостатком этого грузоподъемного захвата является высокое энергопотребление, невысокий ресурс, низкие надежность и КПД ввиду наличия большого числа составных частей, подвижных элементов и механических связей между ними, электропривода с мотор-редуктором, шаговым электродвигателем или серводвигателем для захвата и освобождения ферромагнитного груза. К недостаткам также следует отнести невозможность захвата и транспортирования груза, не являющегося ферромагнитным и (или) магнитопроводящим.
Известен грузоподъемный электромагнит [патент RU 2309887], предназначенный для захвата, удержания, транспортирования и освобождения (отпускания) ферромагнитных грузов, содержащий магнитопровод с внутренним и наружным полюсами, катушку (обмотку) управления, выполненную из изолированного провода и имеющую форму кольца, и заливочную массу. Катушка выполнена из трех частей. Первая и третья части катушки управления выполнены из медного провода, содержат по 10-30% от общего числа витков и размещены соответственно вдоль внутреннего и наружного полюса магнитопровода, а вторая часть катушки управления размещена между первой и третьей частями и выполнена из алюминиевого провода большого сечения. Охлаждение первой и третьей части катушки управления производиться передачей тепла на внутренний и наружный полюса магнитопровода. К снижению температуры второй части катушки, находящаяся в наихудших условиях по отводу тепла, приводит уменьшение удельного тепловыделения за счет увеличения ее объема и площади поверхностей. Этим достигается улучшение теплового режима грузоподъемного электромагнита и длительность его непрерывной работы без превышения допустимой для изоляции проводов катушки управления температуры.
Недостатком указанного электромагнита, так и других грузоподъемных электромагнитов такого принципиального решения, является высокое энергопотребление, поскольку захват и удержание (транспортирование) груза осуществляется только при питании катушки управления электрическим током. Это является особенно важным при длительном удержании груза. Также их недостатком является существенное снижение ресурса проводов катушки управления ввиду их нагрева от теплового действия проходящего электрического тока при длительном удержании груза, приводящее к снижению как ресурса (безотказности) электроизоляции проводников в катушке, так и показателей надежности работы электромагнита в целом. К недостаткам следует также отнести невозможность захвата и транспортирования груза, не являющегося ферромагнитным и (или) магнитопроводящим.
Известны, как наиболее близкие аналоги, однотипные магнитоэлектрические захваты - грузоподъемные магнитные устройства с постоянными магнитами для захвата, длительного удержания, транспортирования и освобождения (отпускания) ферромагнитных грузов [авторские свидетельства SU 1068366; SU 1096186, SU 1585271; SU 1636317; патент US 3978441], каждый из которых выполнен П-образным с вертикальными боковыми полюсами (магнитомягкими полюсными пластинами - наружными полюсами), примыкающими при захвате и удержании к ферромагнитному грузу, содержит горизонтально расположенные неперемагничиваемые высококоэрцитивные постоянные магниты и перемагничиваемые низкокоэрцитивные постоянные магниты, размещенные между боковыми полюсами, причем перемагничиваемые постоянные магниты размещены под или над неперемагничиваемыми постоянными магнитами по направлению к ферромагнитному грузу, и обмотки управления, намотанные по одной вокруг каждого перемагничиваемого постоянного магнита по оси его намагничивания N-S (или S-N).
Захват ферромагнитного груза каждым из указанных близких аналогов осуществляется путем примыкания (приведением в контакт) боковых полюсов магнитоэлектрического захвата к ферромагнитному грузу, подачей на обмотку управления импульса электрического постоянного тока такого направления и величины, что перемагничиваемый постоянный магнит оказывается намагниченным встречно неперемагничиваемому постоянному магниту и их магнитные потоки суммируясь замыкаются через ферромагнитный груз и боковые полюса (магнитомягкие полюсные пластины), создавая притягивающую силу (силу притяжения, удержания) между последними и ферромагнитным грузом, происходит захват, удержание ферромагнитного груза и его последующий перенос (транспортирование) до требуемого места благодаря постоянным магнитам, при этом удержание груза осуществляется в обесточенном состоянии обмотки управления.
Отпускание груза каждым из указанных близких аналогов осуществляется путем подачи на обмотку управления импульса электрического постоянного тока такого обратного направления и величины, который изменяет направление намагничивания перемагничиваемого постоянного магнита на противоположное, т.е. неперемагничиваемый и перемагничиваемые постоянные магниты оказываются намагниченными согласно по отношению друг к другу и их магнитные потоки замыкаются через них, и соответственно суммарный магнитный поток, проходящий через ферромагнитный груз, а следовательно и притягивающая сила (сила притяжения, удержания) падают до величины, меньшей величины веса ферромагнитного груза и последний магнитоэлектрическим захватом отпускается (груз отцепляется от боковых полюсов магнитоэлектрического захвата под собственным весом). Перемагничиваемый постоянный магнит в этом случае шунтирует магнитный поток неперемагничиваемого постоянного магнита.
К недостаткам указанных близких аналогов следует отнести высокое энергопотребление при захвате и отпускании ферромагнитного груза, поскольку для перемагничивания (изменения направления намагничивания) перемагничиваемого постоянного магнита требуется импульс постоянного электрического тока высокой энергии, достаточной для создания магнитодвижущей силы (далее - МДС), равной МДС неперемагничиваемых магнитов и превосходящей МДС перемагничиваемого магнита не менее, чем в два раза, и как следствие импульсный термоудар от теплового действия электрического тока в обмотке управления, снижающий как ресурс (безотказность) электроизоляции проводников в обмотке, так и показателей надежности работы захвата в целом. К недостаткам аналогов также следует отнести, в силу их принципиальных решений, относительно большое число узлов и деталей, присущее многоэлементным конструкциям, принципиальную невозможность выполнения их цилиндрических конструкций, которые как известно обладают большей энергоэффективностью, и невозможность захвата и транспортирования груза, не являющегося ферромагнитным и (или) магнитопроводящим.
Наиболее близким аналогом предлагаемого изобретения, принятым в качестве прототипа, является грузоподъемное магнитное устройство - магнитоэлектрический захват [авторское свидетельство SU 735547], предназначенный для захвата, длительного удержания, транспортирования и освобождения ферромагнитного груза, принципиальное решение которого заключается в том, что устройство - прототип выполнено в виде горизонтально расположенного прямоугольного плоского магнитопроводящего ярма, двух прямоугольных или цилиндрических неперемагничиваемых высококоэрцитивных постоянных магнитов, которые закреплены на противоположных сторонах горизонтальной плоскости указанного ярма друг против друга так, что их оси намагничивания параллельны, а направления намагничивания N-S противоположны и перпендикулярны горизонтальной плоскости указанного ярма, и к которым в свою очередь по их оси намагничивания в направлении к ферромагнитному грузу примыкают по одному прямоугольному или цилиндрическому наружному боковому магнитопроводящему полюсному наконечнику (наружный полюс), образуя вместе с ними и указанным ярмом П-образный магнитопровод, а между этими полюсными наконечниками под неперемагничиваемыми постоянными магнитами по направлению к ферромагнитному грузу закреплен прямоугольный или цилиндрический перемагничиваемый низкокоэрцитивный постоянный магнит, ось намагничивания которого перпендикулярна осям намагничивания неперемагничиваемых высококоэрцитивных постоянных магнитов; при этом вокруг перемагничиваемого постоянного магнита намотана перпендикулярно оси его намагничивания обмотка управления в виде катушки, а вокруг каждого из неперемагничиваемых постоянных магнитов, также перпендикулярно осям их намагничивания, намотаны в виде катушек по одной обмотке регулирования.
Захват груза осуществляется подачей на обмотку управления импульса электрического постоянного тока такого направления и величины, что перемагничиваемый постоянный магнит оказывается намагниченным встречно неперемагничиваемым постоянным магнитам. Синхронно с импульсом электрического постоянного тока, подаваемым в обмотку управления, в обмотки регулирования подается импульс электрического постоянного тока, который ослабляет неперемагничиваемые постоянные магниты, тем самым способствует указанному перемагничиванию перемагничиваемого постоянного магнита, снижая препятствование перемагничиванию со стороны неперемагничиваемых постоянных магнитов. В результате после прекращения подачи обоих импульсов электрического постоянного тока неперемагничиваемый и перемагничиваемые постоянные магниты оказываются намагничены встречно по отношению друг к другу и их суммарный магнитный поток проходит через ферромагнитный груз, создавая рабочую силу тяжения - притягивающую силу (силу притяжения, удержания). Таким образом захват и удержание ферромагнитного груза осуществляется грузоподъемным магнитным устройством в обесточенном состоянии.
Отпускание груза осуществляется подачей на обмотку управления импульса электрического постоянного тока такого обратного направления, который изменяет направление намагничивания перемагничиваемого постоянного магнита на противоположное. Синхронно с этим импульсом электрического постоянного тока, подаваемым в обмотку управления, в обмотки регулирования подается импульс электрического постоянного тока, домагничивающий неперемагничиваемые постоянные магниты, тем самым способствует указанному перемагничиванию перемагничиваемого постоянного магнита. В результате неперемагничиваемый и перемагничиваемые постоянные магниты оказываются намагниченными согласно по отношению друг к другу и большая часть суммарного магнитного потока от неперемагничиваемого и перемагничиваемого постоянных магнитов замыкается через них, а часть оставшегося суммарного магнитного потока, проходящего через ферромагнитный груз, существенно снижается и соответственно снижается притягивающая сила (сила притяжения, удержания) груза до величины, меньшей величины его веса и последний грузоподъемным магнитным устройством отпускается (груз отцепляется от наружных боковых магнитопроводящих полюсных наконечников под собственным весом). Перемагничиваемый постоянный магнит в этом случае нейтрализует (шунтирует) магнитный поток неперемагничиваемых постоянных магнитов по отношению к ферромагнитному грузу.
К недостаткам указанного прототипа следует отнести высокое энергопотребление при захвате и отпускании ферромагнитного груза, поскольку для перемагничивания перемагничиваемого постоянного магнита (изменения направления намагничивания - направления магнитного потока на противоположное) и ослабления неперемагничиваемых постоянных магнитов требуются импульсы электрического постоянного тока высокой энергии, достаточной для создания МДС, близкой по величине к МДС неперемагничиваемых постоянных магнитов и создания МДС, превосходящей МДС перемагничиваемого постоянного магнита не менее, чем в два раза, и как следствие возникает импульсный термоудар от теплового действия электрического постоянного тока в обмотках управления и регулирования, снижающий как ресурс (безотказность) электроизоляции проводников в обмотках, так и показателей надежности работы грузоподъемного магнитного устройства в целом. Важным недостатком прототипа также является сложность конструкции в силу его принципиального решения, предполагающего относительно большое число узлов и деталей, присущее многоэлементным устройствам такого типа, что снижает показатели его надежности. Также его недостатками являются невозможность захвата, удержания, транспортирования и освобождения (отпускания) груза, не являющегося ферромагнитным и (или) магнитопроводящим или обладающего низкими магнитными свойствами, а также невозможность выполнения его в виде цилиндрической конструкции, которая как известно обладает большей энергоэффективностью и удельной грузоподъемностью или обладает меньшими массо-габаритными размерами при той же энергоэффективности и удельной грузоподъемности, из-за разнонаправленности осей (направлений) намагничивания неперемагничиваемых постоянных магнитов, что исключает возможность их замыкания в кольцо (реализации кольцевого - цилиндрического постоянного магнита) в силу принципиального решения прототипа и, соответственно, исключает возможность замыкания в кольцо плоского ярма, наружного полюса и перемагничиваемого постоянного магнита с его катушкой обмотки управления. Принципиальное решение прототипа позволяет организовать конструкцию только в виде двух обращенных друг к другу секторов наружного полюса с их разнонаправленными по направлению намагниченности неперемагничиваемыми постоянными магнитами. Кольцевая же конструкция магнитоэлектрического захвата позволяет максимально эффективно использовать энергию неперемагничиваемого постоянного магнита и магнитомягкого материала (магнитопровода) наружного полюса и ярма.
Задачей заявляемого изобретения является создание магнитоэлектрического захвата груза с повышенной энергоэффективностью и пониженным энергопотреблением, упрощенной конструкции и технологии ее изготовления, повышенными надежностью и ресурсом работы, с расширенными возможностями использования, а также устранение вышеперечисленных недостатков известных прототипа и аналогов.
Решаемыми техническими проблемами в заявляемом изобретении являются упрощение конструкции и технологии ее изготовления, повышение энергоэффективности при захвате, удержании, транспортировании и отпускании как ферромагнитных, так и немагнитопроводящих (неферромагнитных) грузов, с низким (пониженным) энергопотреблением и соответственно обеспечением возможности электропитания от малогабаритного автономного источника пониженной электрической мощности и возможностью работы магнитоэлектрического захвата в составе автоматических устройств длительного рабочего цикла с повышенными ресурсом (безотказностью) и надежностью путем иного, чем в известных прототипе и аналогах, принципиального решения конструкции магнитоэлектрического захвата груза.
Технические результаты, достигаемые предлагаемым изобретением, состоят в повышении энергоэффективности за счет повышения притягивающей силы захвата - удельной грузоподъемности захвата и одновременного снижения энергопотребления, в упрощении конструкции и технологии ее изготовления с одновременным уменьшением количества (объема) активного магнитотвердого материала - постоянных магнитов и проводниковых материалов обмотки управления, в повышении надежности и ресурса работы, в расширении возможностей использования за счет расширения номенклатуры захватываемых грузов как ферромагнитных с различными магнитными свойствами, в т.ч. низкими, так и немагнитопроводящих (неферромагнитных).
Достижение указанных технических результатов в предлагаемом магнитоэлектрическом захвате груза обеспечивается существенными признаками, отдельными и в совокупности, заявляемого изобретения, обусловленными как принципиальными и конструктивными техническими решениями захвата, так и его функциональными характеристиками.
Для решения поставленной задачи и достижения указанных технических результатов, предлагаемый магнитоэлектрический захват груза по п. 1 формулы изобретения, преимущественно по конфигурации цилиндрический, содержащий плоское ярмо (далее - ярмо), неперемагничиваемый постоянный магнит, катушку обмотки управления и наружный полюс, снабжен сердечником и поперечным полюсом, при этом плоское ярмо выполнено в виде диска, постоянный магнит и поперечный полюс выполнены кольцевыми, сердечник и наружный полюс выполнены соответственно в виде цилиндра и полого цилиндра, а постоянный магнит выполнен высококоэрцитивным и намагничен однонаправлено по оси перпендикулярной к его торцевой плоскости, причем диаметры наружных поверхностей постоянного магнита, наружного полюса и плоского ярма одинаковы (приближенно равны), диаметр сердечника одинаков (приближенно равен) с диаметром внутренней поверхности кольца поперечного полюса и меньше диаметра внутренней поверхности наружного полюса, который больше диаметра наружной поверхности поперечного полюса, при этом к одной плоскости ярма прикреплены соосно с ним сердечник и постоянный магнит, к которому с его противоположной стороны от плоского ярма прикреплен также соосно своей плоской поверхностью наружный полюс, образуя с ними в радиальном сечении Ш-образный магнитопровод, причем противоположные, относительно плоского ярма, торцевые поверхности наружного полюса и сердечника примыкают к поверхности ферромагнитного груза при его захвате, а поперечный полюс своей внутренней поверхностью закреплен на наружной поверхности сердечника на осевом расстоянии от плоского ярма большем или равном толщине постоянного магнита, но в пределах осевой длины наружного полюса, при этом на цилиндрической поверхности сердечника намотана и закреплена катушка обмотки управления, примыкающая к противоположной, относительно плоского ярма, плоскости кольца поперечного полюса, а образованный немагнитный зазор между диаметральными наружной поверхностью поперечного полюса и внутренней поверхностью наружного полюса выполнен таким, что его магнитное сопротивление магнитному потоку от постоянного магнита при его прохождении через него и поперечный полюс намного больше, чем магнитное сопротивление магнитному потоку от постоянного магнита, проходящему через торцевые поверхности наружного полюса и сердечника и через ферромагнитный груз при его захвате, и намного меньше магнитного сопротивления магнитному потоку от постоянного магнита, замыкающемуся через эти же торцевые поверхности наружного полюса и сердечника при отсутствии ферромагнитного груза, причем площади торцевых поверхностей наружного полюса S1 и сердечника S2 со стороны ферромагнитного груза одинаковы, площадь торцевой поверхности постоянного магнита S3, примыкающей к наружному полюсу, больше площади наружной диаметральной поверхности поперечного полюса S4, обращенной к немагнитному зазору, а отношение площади S1 или S2 со стороны ферромагнитного груза к площади S3 равно отношению остаточной индукции Br постоянного магнита к максимальной магнитной индукции Вмакс ненасыщенного в магнитном отношении материала наружного полюса или сердечника и выполняется условие 0,5<(S1/S3)=(S2/S3)=(Br/Вмакс)<l, при этом толщина постоянного магнита dm по направлению его намагничивания превышает величину немагнитного зазора δ по направлению прохождения через него магнитного потока и удовлетворяется соотношение 1<(dm×S4)/(δ×S3)≤10, а наружный полюс, ярмо, сердечник и поперечный полюс выполнены из магнитомягких материалов с одинаковыми или близкими магнитными свойствами.
Термин «одинаково» интерпретируется как эквивалент термину «приближенно равно» - « ≈ » [ГОСТ Р 54521-2011, стр. 6, п. 7.5].
Благодаря такому принципиальному техническому и конструктивно-технологическому решению предлагаемого магнитоэлектрического захвата достигается максимально высокая энергоэффективность использования запасенной магнитной энергии высококоэрцитивного постоянного магнита и, соответственно, максимальная удельная грузоподъемность (притягивающая сила) для захвата, удержания и транспортирования ферромагнитного груза за счет максимального использования магнитомягких материалов в предлагаемой конструкции магнитоэлектрического захвата и ферромагнитного груза с отсутствием магнитных насыщений при максимальном значении магнитной проницаемости и минимальными магнитными потерями, в частности от рассеяния магнитного потока постоянного магнита в ней и от неравномерности магнитных свойств составных частей конструкции захвата, что обеспечивается выполнением предлагаемого магнитоэлектрического захвата груза по конфигурации цилиндрическим за счет введения сердечника, выполнения неперемагничиваемого постоянного магнита высокоэрцитивным сплошным кольцевым с однонаправленным намагничиванием по оси, перпендикулярной к его торцевой плоскости (аксиальное - осевое намагничивание), выполнения магнитомягких сердечника и наружного полюса - соответственно в виде цилиндра и полого цилиндра, а поперечного полюса и плоского ярма - соответственно кольцевым и дисковым, организацией в радиальном сечении конструкции захвата Ш-образного магнитопровода и замыканием по нему и ферромагнитному грузу магнитного потока неперемагничиваемого постоянного магнита за счет того, что диаметры наружных поверхностей постоянного магнита, наружного полюса и плоского ярма выполнены одинаковыми, к одной плоскости ярма прикреплены соосно с ним сердечник и постоянный магнит, к которому с его противоположной стороны от плоского ярма прикреплен также соосно своей плоской поверхностью наружный полюс, причем площади торцевых поверхностей наружного полюса S1 и сердечника S2 со стороны ферромагнитного груза, примыкающие к нему при захвате, одинаковы, а отношение площади S1 или S2 со стороны ферромагнитного груза к площади S3 торцевой поверхности постоянного магнита, примыкающей к наружному полюсу, равно отношению остаточной индукции постоянного магнита Br к максимальной магнитной индукции Вмакс ненасыщенного в магнитном отношении материала наружного полюса или сердечника и выполняется условие 0,5<(S1/S3)=(S2/S3)=(Br/Вмакс)<l, при этом наружный полюс, ярмо и сердечник выполнены из магнитомягких материалов с одинаковыми или близкими магнитными свойствами.
Вместе с тем, благодаря тому, что предлагаемый магнитоэлектрический захват снабжен кольцевым поперечным полюсом, диаметр сердечника и диаметр внутренней поверхности кольца поперечного полюса одинаковы и меньше диаметра внутренней поверхности наружного полюса, который больше диаметра наружной поверхности поперечного полюса, а поперечный полюс своей внутренней поверхностью закреплен на наружной поверхности сердечника на осевом расстоянии от плоского ярма большем или равным толщине постоянного магнита, но в пределах осевой длины наружного полюса, при этом на цилиндрической поверхности сердечника намотана и закреплена катушка обмотки управления, примыкающая к противоположной, относительно плоского ярма, плоскости кольца поперечного полюса, а образованный немагнитный зазор между диаметральными наружной поверхностью поперечного полюса и внутренней поверхностью наружного полюса выполнен таким, что его магнитное сопротивление магнитному потоку от постоянного магнита при его прохождении через него и поперечный полюс намного больше, чем магнитное сопротивление магнитному потоку от постоянного магнита, проходящему через торцевые поверхности наружного полюса и сердечника и через ферромагнитный груз при его захвате, и намного меньше магнитного сопротивления магнитному потоку от постоянного магнита, замыкающемуся через эти же торцевые поверхности наружного полюса и сердечника при отсутствии ферромагнитного груза, площадь торцевой поверхности постоянного магнита S3, примыкающей к наружному полюсу, больше площади наружной диаметральной поверхности поперечного полюса S4, обращенной к немагнитному зазору, а отношение площади S1 или S2 со стороны ферромагнитного груза к площади S3 равно отношению остаточной индукции постоянного магнита Br к максимальной магнитной индукции Вмакс ненасыщенного в магнитном отношении материала наружного полюса или сердечника и выполняется условие 0,5<(S1/S3)=(S2/S3)=(Br/Вмакс)<l, при этом толщина постоянного магнита dm по направлению его намагничивания превышает величину немагнитного зазора δ по направлению прохождения через него магнитного потока и удовлетворяется соотношение 1<(dm×S4)/(δ×S3)≤10, а наружный полюс, ярмо, сердечник и поперечный полюс выполнены из магнитомягких материалов с одинаковыми или близкими магнитными свойствами, обеспечивается уменьшение (ослабление) притягивающей силы магнитоэлектрического захвата для отпускания ферромагнитного груза, вплоть до ноля, при подаче кратковременного импульса электрического тока малой мощности в катушку обмотки управления, за счет отведения (перенаправления) магнитного потока постоянного магнита от ферромагнитного груза путем его замыкания с наружного полюса через поперечный полюс на сердечник и далее на ярмо и на постоянный магнит. Такой импульс электрического постоянного тока в катушке обмотки управления, создающий ею встречный магнитный поток магнитному потоку постоянного магнита, замыкающемуся через ферромагнитный груз, достаточен для обеспечения его отведения (перенаправления) в магнитомягком материале элементов конструкции предлагаемого захвата при выполнении установленных, указанных выше, геометрических и магнитных условий и соотношения, и в частности по наружному полюсу и сердечнику, являющихся по существу концентраторами магнитного потока, что определяет намного меньшее энергопотребление, чем энергопотребление катушек управления и перемагничивания в прототипе и близких аналогах при отпускании ферромагнитного груза для перемагничивания и размагничивания постоянных магнитов, при этом для захвата ферромагнитного груза предлагаемым магнитоэлектрическим захватом никакого энергопотребления не требуется, следовательно в совокупности достигается значительно более низкое его энергопотребление при захвате, удержании, транспортировании и отпускании ферромагнитного груза.
Одновременно, благодаря вышеуказанным принципиальным техническим и конструктивно-технологическим решениям предложенного магнитоэлектрического захвата груза, его конструкция существенно упрощена по сравнению с прототипом и близкими аналогами, поскольку он содержит один кольцевой постоянный магнит и одну катушку обмотки управления и не требуются перемагничиваемые постоянные магниты с их катушками обмоток регулирования или управления, а соответственно значительно меньше по количеству и объему требуется активного магнитотвердого материала - постоянных магнитов и провода для одной катушки обмотки управления для захвата, удержания, транспортирования и отпускания одного и того же ферромагнитного груза при тех же функциональных характеристиках предлагаемого магнитоэлектрического захвата. Вместе с тем, поскольку конструкция предлагаемого магнитоэлектрического захвата значительно упрощена, а катушка обмотки управления имеет значительно более низкое энергопотребление и соответственно низкое тепловое действие электрического тока на проводники в обмотке управления, то как ресурс (безотказность) электроизоляции проводников в катушке обмотки управления, так и надежность работы предложенного магнитоэлектрического захвата в целом более высокие.
Достижение расширения возможностей использования предлагаемого магнитоэлектрического захвата груза за счет расширения номенклатуры захватываемых грузов как ферромагнитных с низкими, в том числе различными, магнитными свойствами, так и немагнитопроводящих (неферромагнитных), с высокой энергоэффективностью и соответственно с максимальной удельной грузоподъемностью при минимальных магнитных потерях, обеспечивается согласно п. 2 формулы изобретения, тем, что магнитоэлектрический захват груза по п. 1 формулы изобретения снабжен ферромагнитной пластиной, закрепляемой на немагнитопроводящем или на ферромагнитном грузе с низкими магнитными свойствами, которая выполнена в виде диска толщиной не менее четверти диаметра сердечника, при этом диаметр ферромагнитной пластины больше диаметра наружной поверхности наружного полюса, а противоположные, относительно плоского ярма, торцевые поверхности наружного полюса и сердечника примыкают к плоскости закрепленной на грузе ферромагнитной пластины при его захвате, причем магнитное сопротивление магнитному потоку от постоянного магнита, проходящему при захвате груза через торцевые поверхности наружного полюса и сердечника и через ферромагнитную пластину намного меньше магнитного сопротивления магнитному потоку от постоянного магнита при его прохождении через немагнитный зазор, между диаметральными наружной поверхностью поперечного полюса и внутренней поверхностью наружного полюса, и поперечный полюс, которое в свою очередь намного меньше магнитного сопротивления магнитному потоку от постоянного магнита, замыкающемуся при отсутствии груза с закрепленной на нем ферромагнитной пластиной через эти же торцевые поверхности наружного полюса и сердечника, при этом ферромагнитная пластина выполнена из магнитомягкого материала с одинаковыми или близкими магнитными свойствами магнитомягких материалов, из которых выполнены наружный полюс, ярмо, поперечный полюс и сердечник.
За счет выполнения ферромагнитной пластины в виде диска толщиной не менее четверти диаметра сердечника и диаметром больше диаметра наружной поверхности наружного полюса, из магнитомягкого материала с одинаковыми или близкими магнитными свойствами магнитомягких материалов, из которых выполнены наружный полюс, ярмо, поперечный полюс и сердечник, обеспечивается максимальное использование магнитомягкого материала ферромагнитной пластины с минимальными магнитными потерями при максимальном значении магнитной проницаемости и отсутствии магнитного насыщения, а следовательно обеспечивается максимальная величина притягивающей силы (силы притяжения) груза при его захвате, удержании и транспортировании.
В предлагаемом магнитоэлектрическом захвате груза по любому из п. 1 и п. 2 формулы изобретения, в котором сердечник, ярмо и поперечный полюс могут быть выполнены, согласно п. 3 формулы изобретения, в виде монолитного Т-образного магнитопровода сердечника из магнитомягкого материала с одинаковыми или близкими магнитными свойствами, что и магнитомягкий материал наружного полюса, достигается еще большее повышение его энергоэффективности и удельной грузоподъемности (повышается притягивающая сила захвата и снижается энергопотребление на отпускание груза) благодаря более высокой полезной магнитной загрузке и снижению магнитных и электромагнитных потерь в магнитопроводе сердечника за счет одинаковости магнитных свойств и исключения сопрягаемых поверхностей в конструкции захвата по п. 1 и п. 2 формулы изобретения между сердечником, ярмом и поперечным полюсом, и достигается еще большее упрощение конструкции с одновременным упрощением технологии изготовления при сохранении тех же функциональных характеристиках благодаря выполнению моно детали -монолитного Т-образного магнитопровода.
В предлагаемом магнитоэлектрическом захвате груза по любому из п. 2 или п. 3 формулы изобретения, в котором сердечник, ярмо, поперечный полюс или Т-образный магнитопровод сердечника, наружный полюс и ферромагнитная пластина, согласно п 4 формулы изобретения, могут быть выполнены из одного магнитомягкого материала, достигается еще большие энергоэффективность и удельная грузоподъемность (повышается притягивающая сила захвата и снижается энергопотребление на отпускание груза) благодаря более высокой полезной магнитной загрузке и снижению магнитных и электромагнитных потерь за счет полной одинаковости магнитных свойств.
В предлагаемом магнитоэлектрическом захвате груза по любому из пп. 1-4 формулы изобретения, в котором неперемагничиваемый кольцевой постоянный магнит, согласно п. 5 формулы изобретения, может быть выполнен в виде кольцевого слоя плоских прямоугольных или секторных по конфигурации отдельных неперемагничиваемых высококоэрцитивных постоянных магнитов, намагниченных однонаправлено и перпендикулярно к их торцевой плоскости, числом не менее двух, обращенных или примыкающих в слое последовательно своими боковыми поверхностями друг к другу, а своими торцами к плоской поверхности наружного полюса, образуя замкнутое кольцо, в котором все отдельные плоские постоянные магниты размещены в слое по направлению намагничивания в одном направлении, при этом каждый отдельный плоский постоянный магнит выполнен в частности из магнитотвердого спеченого материала типа SmCo или NdFeB с остаточной магнитной индукцией не менее 0,8 Тл, достигается расширение возможностей реализации предлагаемого
магнитоэлектрического захвата груза в крупногабаритном исполнении без потерь запасенной магнитной энергии высококоэрцитивных постоянных магнитов, когда не представляется возможным конструктивно-технологически выполнить постоянный магнит сплошным кольцевым, как то указано в п. 1 формулы изобретения, и соответственно расширение возможностей использования предлагаемого магнитоэлектрического захвата для захвата, удержания, транспортирования и отпускания как ферромагнитного с различными магнитными свойствами, в том числе низкими, так и немагнитопроводящего (неферромагнитного) груза больших габаритов и массы, при сохранении его высоких энергоэффективности и удельной грузоподъемности, упрощенной конструкции, повышенных надежности и ресурса работы.
Сущность заявляемого изобретения, принципиальные и конструктивные технические решения предлагаемого магнитоэлектрического захвата груза поясняются и проиллюстрированы фиг.1-7.
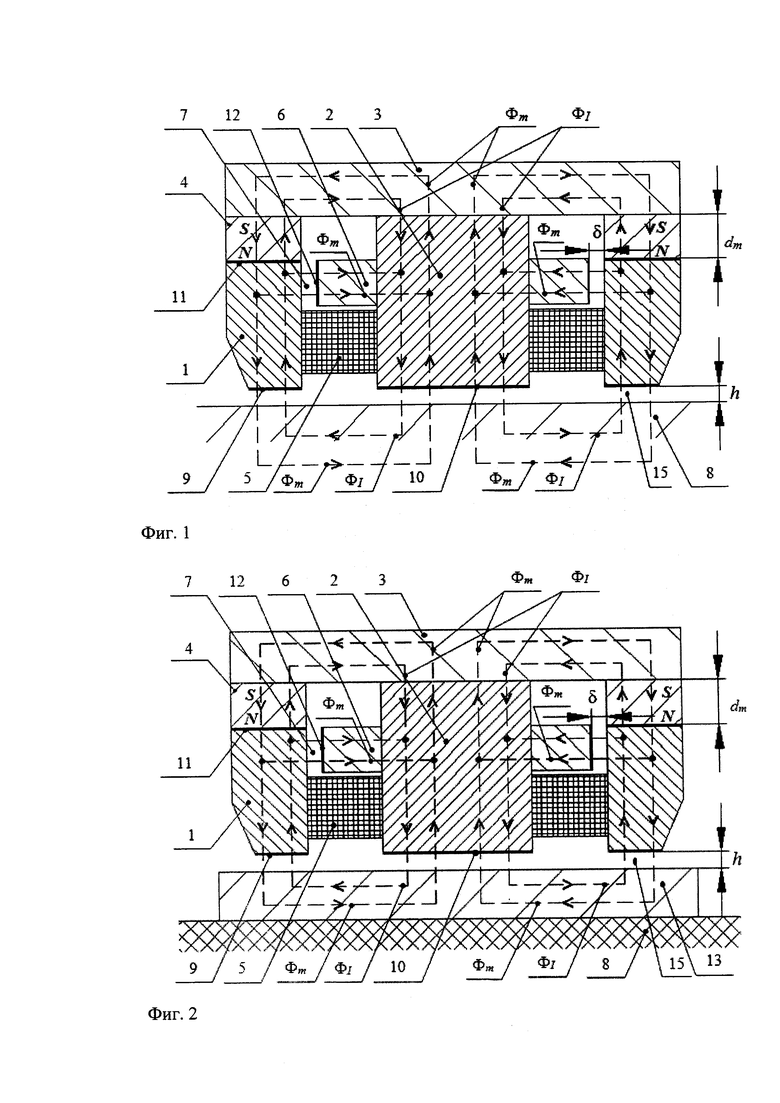
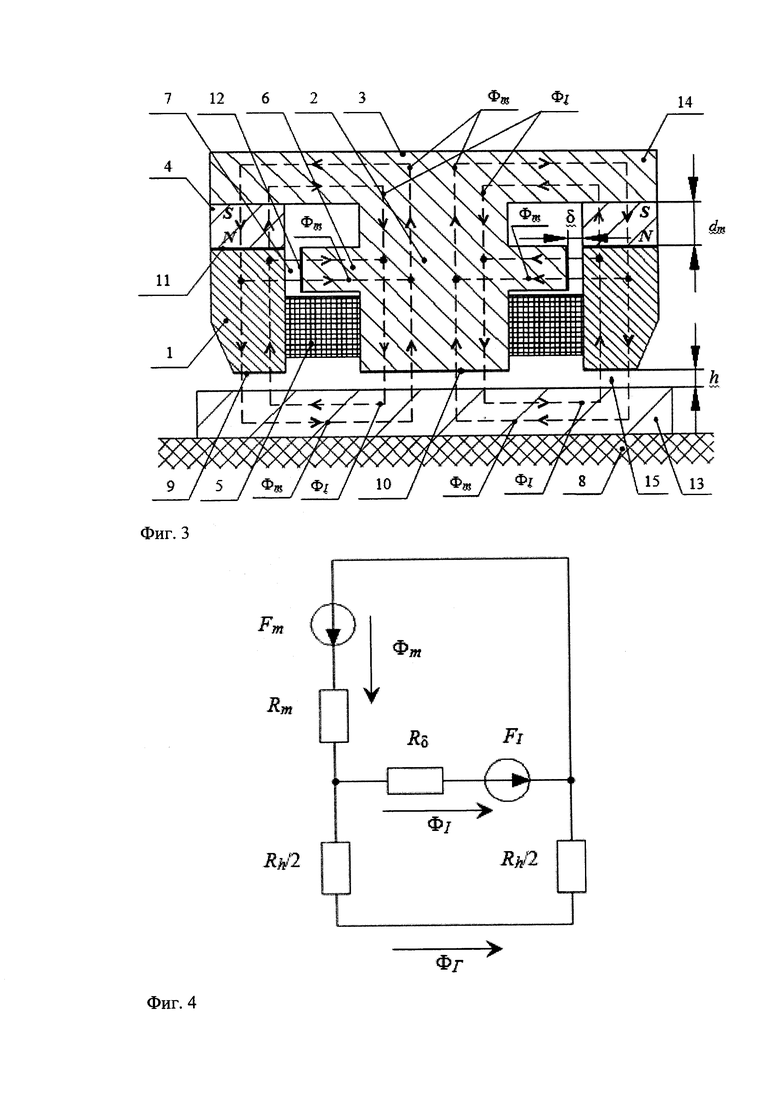
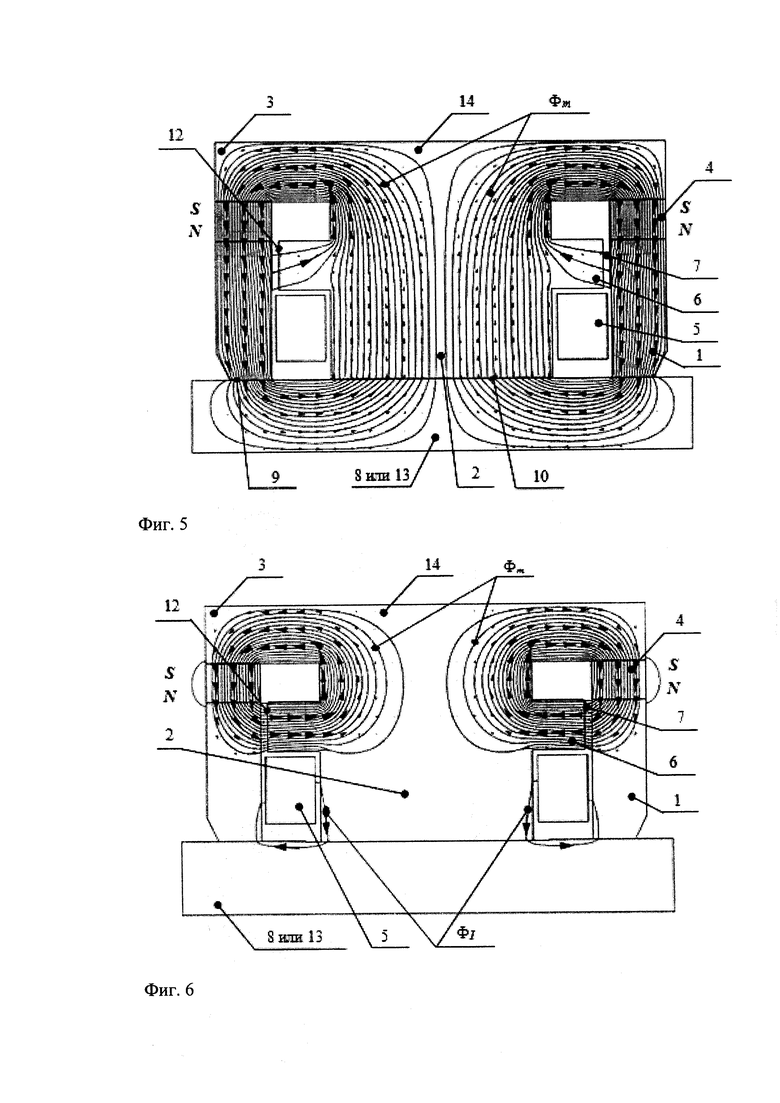
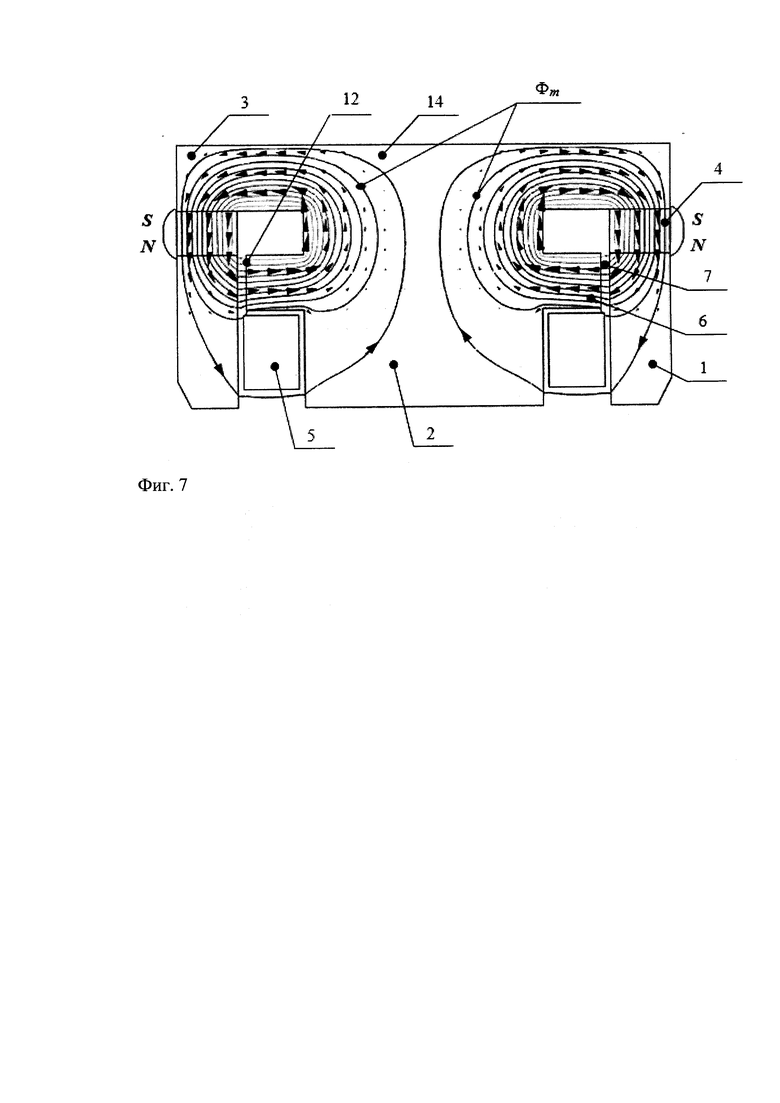
На фиг.1 показан общий вид магнитоэлектрического захвата груза в сечении с ферромагнитным грузом по п. 1 формулы изобретения; на фиг.2 показан общий вид магнитоэлектрического захвата груза в сечении, что и на фиг.1, но с ферромагнитной пластиной, закрепляемой на немагнитопроводящем или на ферромагнитном грузе с низкими магнитными свойствами, по п. 2 формулы изобретения; на фиг.3 показан общий вид магнитоэлектрического захвата груза в сечении, что и на фиг.1, с ферромагнитной пластиной, закрепляемой на немагнитопроводящем или на ферромагнитном грузе с низкими магнитными свойствами, что и на фиг.2, но с монолитным Т-образным магнитопроводом сердечника по п. 3 формулы изобретения; на фиг.4 представлена эквивалентная схема замещения магнитных цепей магнитоэлектрического захвата груза для его вариантов, приведенных на фиг.1, 2 и 3; на фиг.5 приведена картина распределения магнитного поля в магнитоэлектрическом захвате груза при захвате, удержании и транспортировании груза; на фиг.6 приведена картина распределения магнитного поля в магнитоэлектрическом захвате груза при отпускании груза в условиях подачи в катушку обмотки управления импульса электрического тока; на фиг.7 приведена картина распределения магнитного поля в магнитоэлектрическом захвате груза при отпущенном грузе и отсутствии в катушке обмотки управления импульса электрического тока.
На фиг.1-7 приняты следующие обозначения:
1 - наружный полюс (магнитопроводящий);
2 - сердечник (магнитопроводящий);
3 - плоское ярмо (магнитопроводящее);
4 - неперемагничиваемый высококоэрцитивный кольцевой сплошной постоянный магнит с осевым намагничиванием направления S-N или кольцевой слой плоских прямоугольных или секторных по конфигурации отдельных неперемагничиваемых высококоэрцитивных постоянных магнитов, намагниченных однонаправлено и перпендикулярно к своей торцевой плоскости каждый направления S-N (далее - постоянный магнит);
5 - катушка обмотки управления;
6 - поперечный полюс;
7 - немагнитный зазор между поперечным полюсом 6 и наружным полюсом 1 (далее - немагнитный зазор 7);
8 - груз;
9 - торцевая поверхность площадью S1 наружного полюса 1 со стороны груза, примыкающая при захвате и удержании к ферромагнитному грузу 8 (см фиг.1) или к ферромагнитной пластине 13, закрепляемой на грузе 8 (см. фиг.2 и 3);
10 - торцевая поверхность площадью S2 сердечника 2 со стороны груза, примыкающая при захвате и удержании к ферромагнитному грузу (см фиг.1) или к ферромагнитной пластине 13 (см. фиг.2 и 3), закрепляемой на грузе 8;
11 - торцевая поверхность постоянного магнита 4 площадью S3;
12 - наружная диаметральная поверхность поперечного полюса 6 площадью S4;
13 - ферромагнитная пластина, закрепляемая на грузе (см. фиг.2 и 3);
14 - монолитный Т-образный магнитопровод сердечника, образованный сердечником 2, ярмом 3 и поперечным полюсом 6 (см. фиг.3) по п. 3 формулы изобретения;
15 - немагнитный зазор между ферромагнитным грузом 8 (см фиг.1) или ферромагнитной пластиной 13 (см. фиг.2 и 3) и торцевыми поверхностями наружного полюса 1 и сердечника 2 или 14 (см. фиг.1, 2 и 3), далее - немагнитный зазор 15;
dm - толщина постоянного магнита 4 по направлению намагничивания
S-N;
δ - величина немагнитного зазора 7;
h - величина немагнитного зазора 15;
Φm - магнитный поток постоянного магнита 4; пунктирными линиями со стрелками показаны контуры замыкания Фm при его прохождении через наружный полюс 1, поперечный полюс 6, ферромагнитный груз 8 или ферромагнитную пластину 13, сердечник 2 или 14, ярмо 3 (см. фиг.1, 2, 3, 4, 5, 6 и 7), определяемые режимом работы магнитоэлектрического захвата груза: захват, удержание, транспортирование, отпускание или отсутствие груза;
ΦI - магнитный поток, создаваемый импульсом электрического тока в обмотке управления 5; пунктирными линиями со стрелками показаны контуры замыкания ΦI при его прохождении через наружный полюс 1, поперечный полюс 6, ферромагнитный груз 8 или ферромагнитную пластину 13, сердечник 2 или 14, ярмо 3 (см. фиг.1, 2, 3 и 6), в режиме работы магнитоэлектрического захвата груза: отпускание;
ФГ - суммарный магнитный поток (см. фиг.4), образуемый Фm и ФI проходящий через торцевые поверхности наружного полюса 1 и сердечника 2 или 14 и ферромагнитный груз 8 (см. фиг.1, 5 и 6) или ферромагнитную пластину 13 (см. фиг.2, 3, 5 и 6);
Fm - МДС постоянного магнита 4;
 - магнитное сопротивление постоянного магнита 4,
- магнитное сопротивление постоянного магнита 4,
где μ0 - магнитная постоянная (см. ГОСТ 8.417-2002);
 - магнитное сопротивление немагнитного зазора 7;
- магнитное сопротивление немагнитного зазора 7;
 - магнитное сопротивление магнитному потоку,
- магнитное сопротивление магнитному потоку,
проходящему через торцевые поверхности 9 и 10, соответственно, наружного полюса 1 и сердечника 2 и ферромагнитный груз 8 или ферромагнитную пластину 13 (см. фиг.1, 2, 3 и 5), имеющие магнитное сопротивление RФ по магнитомягкому (ферромагнитному) материалу такое, что

FI=T⋅w - МДС, создаваемая импульсом электрического тока в обмотке управления 5,
где I - импульс электрического тока в катушке обмотки управления 5;
w - число витков в катушке обмотки управления 5;
Картины распределения магнитного поля в предлагаемом магнитоэлектрическом захвате груза при захвате, удержании, транспортировке и отпускании груза, приведенные на фиг.5, 6 и 7, получены по результатам верификационного численного компьютерного моделирования магнитного поля в его конструкции методом конечно-элементного анализа в программном комплексе ANSYS Maxwell [ANSYS Maxwell 2014. Training Manual. Руководство пользователя].
Предлагаемый магнитоэлектрический захват груза по п. 1 формулы изобретения, преимущественно по конфигурации цилиндрический, содержит (см. фиг.1) наружный полюс 1 в виде полого цилиндра, сердечник 2 в виде цилиндра и плоское ярмо 3 в виде диска, выполненные из магнитомягкого материала; кольцевой высококоэрцитивный постоянный магнит 4, намагниченный однонаправлено по оси перпендикулярной к его торцевой плоскости S-N; катушку обмотки управления 5; кольцевой поперечный полюс 6, выполненный из магнитомягкого материала и образующий с наружным полюсом 1 немагнитный зазор 7. Диаметры наружных поверхностей постоянного магнита 4, наружного полюса 1 и плоского ярма 3 одинаковы, наружный диаметр сердечника 2 одинаков с диаметром внутренней поверхности кольца поперечного полюса 6 и меньше диаметра внутренней поверхности наружного полюса 1, который больше диаметра наружной поверхности поперечного полюса 6. К одной плоскости ярма, обращенной в сторону ферромагнитного груза 8, прикреплены соосно с ним сердечник 1 и постоянный магнит 4, к плоской торцевой поверхности которого с его противоположной стороны относительно плоского ярма 3 прикреплен также соосно своей плоской поверхностью наружный полюс 1, образуя с ними - 1, 2, 3 и 4, в радиальном сечении Ш-образный магнитопровод, в котором замыкаются Фт и ФI Противоположные, относительно плоского ярма 3, торцевые поверхности наружного полюса 1 и сердечника 2 примыкают к поверхности ферромагнитного груза 8 при его захвате. Поперечный полюс 6 своей внутренней поверхностью закреплен на наружной поверхности сердечника 2 на осевом расстоянии от плоского ярма 3 большем или равном толщине dm постоянного магнита 4, но в пределах осевой длины наружного полюса 2. На цилиндрической поверхности сердечника 2 намотана и закреплена катушка обмотки управления 5, примыкающая к противоположной, относительно плоского ярма 3, плоскости кольца поперечного полюса 6.
За счет разности диаметров внутренней поверхности наружного полюса 1 и диаметра наружной поверхности поперечного полюса 6 образован немагнитный зазор 7 по величине δ таким, что его магнитное сопротивление Rδ магнитному потоку Фm при его прохождении через поперечный полюс 6 намного больше, чем магнитное сопротивление Rh магнитному потоку Фm при его прохождении через торцевые поверхности 9 и 10, соответственно, наружного полюса 1 и сердечника 2 и через ферромагнитный груз 8 при его захвате, а при отсутствии ферромагнитного груза 8 Rδ для Фm намного меньше Rh для Фm.
Площади торцевых поверхностей наружного полюса 1 - S1 и сердечника 2 - S2 со стороны ферромагнитного груза 8 или ферромагнитной пластины 13 одинаковы, т.е. S1≈S2, площадь торцевой поверхности 11 постоянного магнита 4 - S3, примыкающей к торцевой поверхности наружного полюса 1, больше площади наружной диаметральной поверхности 12 поперечного полюса 6 - S4, обращенной к немагнитному зазору 7, при этом отношение S1 или S2 к S3 должно быть равно отношению остаточной индукции Br постоянного магнита 4 к максимальной магнитной индукции ненасыщенного в магнитном отношении магнитомягкого (ферромагнитного) материала Вмакс наружного полюса 1 или сердечника 2, т.е. должно быть выполнено следующее условие:
При этом Вмакс магнитомягкого (ферромагнитного) материала меньше его магнитной индукции насыщения Bs [Шматко О.А., Усов Ю.В. Электрические и магнитные свойства металлов и сплавов: Справочник // Киев: Наукова Думка, 1987, стр. 10-11,464-473].
Толщина постоянного магнита dm по направлению намагничивания превышает величину δ немагнитного зазора 7 по направлению прохождения через него магнитного потока Фm и ФI и должно удовлетворяться соотношение:
Наружный полюс 1, ярмо 3, сердечник 2 и поперечный полюс 6 выполняются из магнитомягких (ферромагнитных) материалов с одинаковыми или близкими магнитными свойствами.
Предлагаемый вариант магнитоэлектрического захвата груза по п. 2 формулы изобретения схожий с вариантом по п. 1 формулы изобретения (см. фиг.1) и отличается от него тем, что (см. фиг.2) он снабжен ферромагнитной пластиной 13, закрепляемой на немагнитопроводящем (немагнитном или неферромагнитном) или на ферромагнитном грузе 8 с низкими, в т.ч. различными, магнитными свойствами. Пластина 13 выполнена в виде диска толщиной не менее четверти диаметра сердечника 2, при этом диаметр ферромагнитной пластины 13 больше диаметра наружной поверхности наружного полюса 1, а противоположные, относительно плоского ярма 3, торцевые поверхности наружного полюса 1 и сердечника 2 примыкают к плоскости закрепленной на грузе 8 ферромагнитной пластины 13 при его захвате. Магнитное сопротивление Rh магнитному потоку Фm, проходящему при захвате груза 8 через торцевые поверхности 9 и 10, соответственно, наружного полюса 1 и сердечника 2 и через ферромагнитную пластину 13 намного меньше магнитного сопротивления Rδ магнитному потоку Фm при его прохождении через немагнитный зазор 7 и поперечный полюс 2, которое в свою очередь намного меньше магнитного сопротивления магнитному потоку Фm, замыкающемуся при отсутствии груза 8 с закрепленной на нем ферромагнитной пластиной 13 через эти же торцевые поверхности 9 и 10, соответственно, наружного полюса 1 и сердечника 2. Ферромагнитная пластина выполняется из магнитомягкого материала с одинаковыми или близкими магнитными свойствами магнитомягких (ферромагнитных) материалов, из которых выполнены наружный полюс 1, ярмо 3, поперечный полюс 6 и сердечник 2.
Предлагаемый вариант магнитоэлектрического захвата груза по п. 3 формулы изобретения схожий с вариантами по п. 1 и п. 2 формулы изобретения (см. фиг.1 и 2) и отличается от них тем, что (см. фиг.3) сердечник 2, ярмо 3 и поперечный полюс 6 выполнены в виде монолитного Т-образного магнитопровода сердечника из магнитомягкого (ферромагнитного) материала с одинаковыми или близкими магнитными свойствами, что и магнитомягкий (ферромагнитный) материал наружного полюса 1.
Предлагаемый вариант магнитоэлектрического захвата груза по п. 4 формулы изобретения схожий с вариантами по п. 2 и п. 3 формулы изобретения (см. фиг.2 и 3) и отличается от них тем, что сердечник 2, ярмо 3, поперечный полюс 6 или Т-образный магнитопровод сердечника 14, наружный полюс 1 и ферромагнитная пластина 13 выполнены из одного магнитомягкого материала.
Предлагаемый вариант магнитоэлектрического захвата груза по п. 5 формулы изобретения схожий с вариантами по пп. 1-4 формулы изобретения (см. фиг.1, 2 и 3) и отличается от них тем, что неперемагничиваемый кольцевой постоянный магнит 4 выполнен в виде кольцевого слоя плоских прямоугольных или секторных по конфигурации отдельных неперемагничиваемых высококоэрцитивных постоянных магнитов, намагниченных однонаправлено S-N и перпендикулярно к их торцевой плоскости, числом не менее двух, обращенных или примыкающих в слое последовательно своими боковыми поверхностями друг к другу, а своими торцами к плоской поверхности наружного полюса 1, образуя замкнутое в геометрическом и магнитном отношении кольцо, в котором все отдельные плоские постоянные магниты размещены в слое по направлению намагничивания S-N в одном направлении, при этом каждый отдельный плоский постоянный магнит выполнен в частности из магнитотвердого спеченого материала типа SmCo или NdFeB с остаточной магнитной индукцией не менее 0,8 Тл.
Неперемагничиваемый высококоэрцитивный кольцевой постоянный магнит 4 (см. фиг.1, 2 и 3) с намагничиванием однонаправлено по оси S-N, а также плоские прямоугольные или секторные по конфигурации отдельные неперемагничиваемые высококоэрцитивные постоянные магниты, намагниченные каждый однонаправлено S-N и перпендикулярно к своей торцевой плоскости, выполняются из магнитотвердых спеченных материалов типа SmCo на основе сплавов кобальта [ГОСТ 21559-76] или типа NdFeB на основе сплава неодим-железо-бор [ГОСТ Р 52956-2008].
Наружный полюс 1, сердечник 2, ярмо 3, поперечный полюс 6, Т-образный магнитопровод сердечника 14 и ферромагнитная пластина 13 (см. фиг.1, 2 и 3) выполняются из магнитомягких (ферромагнитных) материалов, как сплошными, так и шихтованными - из электротехнических сталей [ГОСТ 11036-75, ГОСТ 21427.1-83, ГОСТ 21427.2-83, ГОСТ 21427.4-78] или из сплавов магнитномягких типа 50Н, 36КНМ и др. по ГОСТ 10160-75.
Работа предлагаемого магнитоэлектрического захвата груза осуществляется следующим образом.
В исходном состоянии обмотка управления 5 обесточена и магнитный поток Ф! отсутствует, ферромагнитный груз 8 (см. фиг.1), или немагнитный груз или ферромагнитный груз с низкими магнитными свойствами 8 с установленной на нем ферромагнитной пластиной 13 (см. фиг.2 и 3), отсутствуют или отпущены (см. фиг.7); практически весь магнитный поток Фm постоянного магнита или слоя отдельных постоянных магнитов 4 замыкается внутри магнитного захвата, проходя от постоянного магнита или слоя отдельных постоянных магнитов 4 через наружный полюс 1, немагнитный зазор 7 и далее через поперечный полюс 6, сердечник 2 и ярмо 3, которые образуют в радиальном сечении Ш-образный магнитопровод, как это показано штриховыми линиями со стрелками на фиг.1 и 2 или далее через Т-образный магнитопровод сердечника 14, как это показано штриховыми линиями со стрелками на фиг.3, что подтверждается результатами верификационного численного компьютерного моделирования, приведенного на фиг.7, где показано замыкание в магнитном захвате магнитного потока Фm линиями со стрелками, при этом магнитомягкие материалы наружного полюса 1, поперечного полюса 6, сердечника 2, ярма 3 или Т-образного магнитопровода сердечника 14 в магнитном отношении ненасыщенны.
Это происходит благодаря тому, что образованный немагнитный зазор
7 величиной 5 между диаметральными наружной поверхностью 12 поперечного полюса 6 или Т-образного магнитопровода сердечника 14 и внутренней поверхностью наружного полюса 1 (см. фиг.1, 2, 3 и 7) выполнен таким, что его магнитное сопротивление Rδ магнитному потоку Фm от постоянного магнита или от слоя отдельных постоянных магнитов 4 при его прохождении через поперечный полюс 6 или Т-образный магнитопровод сердечника 14, несопоставимо значительно меньше, чем магнитное сопротивление магнитному потоку Фm для его прохождения и замыкания через наружный полюс 1, сердечник 2 или Т-образный магнитопровод сердечника 14 и немагнитный зазор между ними, который несопоставимо больше по величине немагнитного зазора 7 величины 5, образованный благодаря тому, что диаметр сердечника 2 или Т-образного магнитопровода сердечника 14 меньше диаметра внутренней поверхности наружного полюса 1 (см. фиг.1, 2, 3 и 7).
Для захвата груза и его последующего удержания и транспортирования, магнитоэлектрический захват или ферромагнитный груз 8 (см. фиг.1), или немагнитный груз или ферромагнитный груз с низкими магнитными свойствами 8 с установленной на нем ферромагнитной пластиной 13 (см. фиг.2 и 3) подводят друг к другу, магнитный поток Фm постоянного магнита или слоя отдельных постоянных магнитов 4 начинает замыкаться по мере уменьшения величины h немагнитного зазора 15 и при h→0, замыкается полностью, проходя, как это показано штриховыми линиями со стрелками на фиг.1, 2 и 3, через наружный полюс 1, его торцевую поверхность 9 (S1), немагнитный зазор 15 величиной h и далее через ферромагнитный груз 8 или ферромагнитную пластину 13 (см. фиг.2 и 3), из них через немагнитный зазор 15 величиной h в торцевую поверхность 10 (S2) и далее через сердечник 2 и ярмо 3, или Т-образный магнитопровод сердечника 14, что подтверждается результатами верификационного численного компьютерного моделирования, приведенного на фиг.5, где показано замыкание в магнитном захвате магнитного потока Фm линиями со стрелками, при этом магнитомягкие материалы наружного полюса 1, сердечника 2, ярма 3 или Т-образного магнитопровода сердечника 14, ферромагнитного груза 8 или ферромагнитной пластины 13 в магнитном отношении ненасыщенны. При этом обмотка управления 5 обесточена и магнитный поток Ф! отсутствует. В результате создается притягивающая сила (сила притяжения), прямо пропорциональная квадрату величины Фm, и происходит захват груза. В этом состоянии магнитным захватом производится удержание и транспортирование груза.
Это происходит благодаря тому, что магнитное сопротивление Rh магнитному потоку Фm постоянного магнита или слоя отдельных постоянных магнитов 4 становится несоизмеримо значительно меньше магнитного сопротивления воздушного зазора 7 Rδ и весь магнитный поток постоянного магнита или слоя отдельных постоянных магнитов 4 замыкается через ферромагнитный груз 8 или ферромагнитную пластину 13.
Отпускание груза магнитоэлектрическим захватом осуществляется путем подачи в катушку обмотки управления 5 импульса электрического постоянного тока (I), в результате чего образуется магнитный поток ФI, который замыкается в магнитоэлектрическом захвате, как это показано штриховыми линиями со стрелками на фиг.1, 2, 3 и 5, двумя путями: первый путь - через сердечник 2 (Т-образного магнитопровода сердечника 14) и его торцевую поверхность 10 (S2) в ферромагнитный груз 8 или ферромагнитную пластину 13, в наружный полюс 1 через его торцевую поверхность 9 (S1) и далее через немагнитный зазора 7 в поперечный полюс 6 (Т-образного магнитопровода сердечника 14) через торцевую поверхность 12 (S4); второй путь - через сердечник 2 (Т-образный магнитопровод сердечника 14) и торцевую поверхность 10 (S2) в ферромагнитный груз 8 или ферромагнитную пластину 13, в наружный полюс 1 через его торцевую поверхность 9 (Si) и далее через постоянный магнит 4 в ярмо 3 и в сердечник 2 (Т-образного магнитопровода сердечника 14). При этом в катушку обмотки управления 5 подается импульс электрического постоянного тока такого направления (полярности), что магнитный поток ФI и магнитный поток Фm постоянного магнита или слоя отдельных постоянных магнитов 4 в поперечным полюсе 6 направлены согласно, а в наружном полюсе 1, в ферромагнитном грузе 8 или ферромагнитной пластине 13, в ярме 3 и в сердечнике 2 Т-образного магнитопровода сердечника 14 - встречно. Величины частей магнитного потока ФI, замыкающихся по указанным путям, определяются соотношением Rm и Rδ, и в результате суммарный магнитный поток ФГ, проходящий через ферромагнитный груз 8 или ферромагнитную пластину 13, а с ним и притягивающая сила (сила притяжения) магнитоэлектрического захвата спадает практически до нуля. Это подтверждается результатами верификационного численного компьютерного моделирования, приведенного на фиг.6, где при отпускании груза магнитный поток Фm постоянного магнита или слоя отдельных постоянных магнитов 4 (показан линиями со стрелками) замыкается в магнитном захвате аналогично случаю отсутствия ферромагнитного груза 8 или немагнитопроводящего груза, или ферромагнитного груза с низкими магнитными свойствами, на которых установлена ферромагнитная пластина 13 (см. фиг.7), и соответственно не создается притягивающей силы (сила притяжения). В качестве иллюстрации, на фиг.6 приведено замыкание магнитного потока ФI, когда величина импульса электрического постоянного тока I в катушке обмотки управления 5 превышает требуемое значение соразмерности Фm и ФI и возникает притягивающая сила (сила притяжения) пропорциональная их разности от ФI.
Длительность импульса электрического постоянного тока I составляет десятые доли секунды и определяется временем, необходимым ферромагнитному грузу 8, или немагнитному грузу или ферромагнитному грузу с низкими магнитными свойствами с установленной на нем ферромагнитной пластиной 13 для отдаления от магнитоэлектрического захвата под действием собственного веса на дистанцию, при которой магнитное сопротивление Rh магнитному потоку Фm, проходящему через ферромагнитный груз 8 или ферромагнитную пластину 13 и торцевые поверхности 9 и 10 наружного полюса 1 и сердечника 2 Т-образного магнитопровода сердечника 14, становиться значительно больше магнитного сопротивления Rδ немагнитного зазора 7, и тогда магнитный поток Фm постоянного магнита или слоя отдельных постоянных магнитов 4 не проходит через ферромагнитный груз 8 или ферромагнитную пластину 13 и соответственно притягивающая сила (сила притяжения) магнитоэлектрическим захватом не создается даже после снятия импульса электрического тока I.
Величина импульса электрического постоянного тока I в катушке обмотки управления 5 для отдачи груза может быть незначительной, поскольку достаточно незначительного в течении определенного времени ослабления притягивающей силы (силы притяжения) создаваемой магнитным потоком Фm постоянного магнита или слоя отдельных постоянных магнитов 4 до значения, меньшей веса груза, условно обратной (противоположной) силой создаваемой катушкой обмотки управления 5 с электрическим постоянным током I прямо пропорциональной квадрату произведения Tw, т.е. квадрату создаваемой ею МДС.
Согласно приведенной на фиг.2 эквивалентной схеме замещения магнитной цепи магнитоэлектрического захвата суммарный магнитный поток ФГ, проходящий через ферромагнитный груз 8, или немагнитный груз или ферромагнитный груз с низкими магнитными свойствами с установленной на нем ферромагнитной пластиной 13, может быть описан следующим выражением:
Условием отсутствия магнитного потока ФГ, проходящего через груз 8, захваченный магнитоэлектрическим захватом, и соответственно отсутствия его притягивающей силы (силы удержания груза), является подача в обмотку управления 5 импульса электрического постоянного тока I, создающего МДС величиной
При этом должно выполнятся следующее соотношение:
Нарушение неравенства в правой части показанного соотношения, т.е. (dm×S4)/(δ×S3)>10, может привести к снижению магнитного потока ФГ, а следовательно и к снижению притягивающей силы (силы притяжения) магнитоэлектрического захвата при удержании ферромагнитного груза с низкими магнитными свойствами, т.е. с низкой магнитной проницаемостью. Невыполнение неравенства в левой части показанного соотношения, т.е  приведет к снижению энергоэффективности, поскольку для обеспечения отсутствия магнитного потока ФГ, проходящего через груз 8, захваченный магнитоэлектрическим захватом, и соответственно отсутствия его притягивающей силы (силы удержания груза), потребуется подача в обмотку управления 5 импульса электрического тока, создающего МДС величиной, превосходящей МДС постоянного магнита или слоя отдельных постоянных магнитов 4.
приведет к снижению энергоэффективности, поскольку для обеспечения отсутствия магнитного потока ФГ, проходящего через груз 8, захваченный магнитоэлектрическим захватом, и соответственно отсутствия его притягивающей силы (силы удержания груза), потребуется подача в обмотку управления 5 импульса электрического тока, создающего МДС величиной, превосходящей МДС постоянного магнита или слоя отдельных постоянных магнитов 4.
При выполнении в предлагаемом магнитоэлектрическом захвате S1≈S2 и S3>S4 обеспечивается отсутствие в магнитопроводящих наружном полюсе 1, ярме 3, поперечном полюсе 6 и сердечнике 2 или Т-образном магнитопроводе сердечника 14 локальных магнитных насыщений их магнитомягкого (ферромагнитного) материала, способных приводить к снижению притягивающей силы (силы удержания груза). При выполнении в предлагаемом магнитоэлектрическом захвате условия  наряду с соотношением
наряду с соотношением  обеспечивается получение максимальной плотности магнитного потока ФГ, проходящего через ферромагнитный груз или ферромагнитную пластину, закрепленную на немагнитопроводящем или на ферромагнитном грузе с низкими магнитными свойствами, а следовательно и максимальной величины притягивающей силы (силы притяжения) груза при его захвате, удержании и транспортировании.
обеспечивается получение максимальной плотности магнитного потока ФГ, проходящего через ферромагнитный груз или ферромагнитную пластину, закрепленную на немагнитопроводящем или на ферромагнитном грузе с низкими магнитными свойствами, а следовательно и максимальной величины притягивающей силы (силы притяжения) груза при его захвате, удержании и транспортировании.
Для отпускания ферромагнитного груза 8, или немагнитопроводящего груза или ферромагнитного груза с низкими магнитными свойствами с установленной на нем ферромагнитной пластиной 13, предлагаемому магнитоэлектрическому захвату требуется импульс электрического постоянного тока I, создающий МДС до десяти раз меньше, чем МДС постоянного магнита или слоя отдельных постоянных магнитов 4, а захват, удержание и транспортирование груза осуществляется без потребления электрической энергии. Это обеспечивает существенное, более чем на порядок, снижение потребления электрической энергии в виде короткого импульса электрического постоянного тока по сравнению с аналогами и прототипом и дает возможность работы предлагаемого магнитоэлектрического захвата при питании от автономного импульсного источника питания малых габаритов.
Вместе с тем, в предлагаемом магнитоэлектрическом захвате груза, при необходимости, может быть обеспечен плавный захват груза с плавным нарастанием притягивающей силы путем подачи на катушку обмотки управления 5 импульса электрического постоянного тока, соразмерного по величине и длительности весу груза.
В настоящее время разработана конструкторская и технологическая документация основного производства предлагаемого магнитоэлектрического захвата груза.
Согласно проведенным расчетам конструкции нескольких вариантов предлагаемого магнитоэлектрического захвата груза малогабаритного исполнения и сопоставления их результатов с результатами проведенного верификационного численного компьютерного моделирования магнитного поля в его конструкции методом конечно-элементного анализа в программном комплексе ANSYS Maxwell, определено, что его энергоэффективность по удельной грузоподъемности составляет значение не менее 600 Н притягивающей силы на кг массы магнитоэлектрического захвата и по энергопотреблению (средняя электрическая мощность импульса электрического постоянного тока за время отпускания груза) составляет значение не более 0,003 Вт на 1 Н притягивающей силы (силы притяжения) захвата.
Таким образом, заявленные технические результаты можно считать достигнутыми.
Термины и определения понятий в заявляемом изобретении приведены в соответствии с ГОСТ 18311-80, ГОСТ Р 58885-2020, ГОСТ 21559-76, ГОСТ Р 52956-2008, ГОСТ 19693-74, ГОСТ Р 52002-2003, ГОСТ 10160-75, ГОСТ 1103-75, ГОСТ IEC 60027-1-2015, ГОСТ 21427.1…4-83, ГОСТ 3836-83, ГОСТ 8.377-80, ГОСТ Р 54521-2011.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ бездатчикового определения наличия/отсутствия груза в магнитном захвате грузозахватного устройства | 2024 |
|
RU2834851C1 |
| Грузоподъемное магнитное устройство | 1982 |
|
SU1096186A1 |
| Магнитный захват | 1988 |
|
SU1585271A2 |
| Устройство для закрепления ферромагнитных деталей | 1989 |
|
SU1713773A1 |
| Магнитная плита | 1989 |
|
SU1764937A1 |
| Магнитный захват | 1988 |
|
SU1646976A1 |
| Магнитный держатель | 1990 |
|
SU1743831A1 |
| Магнитный захват | 1982 |
|
SU1068366A1 |
| Грузоподъемное магнитное устройство | 1978 |
|
SU735547A1 |
| Магнитная плита | 1990 |
|
SU1780985A1 |
Изобретение относиться к грузозахватным устройствам с постоянными магнитами и может быть использовано для захвата, длительного удержания и транспортирования с последующим отпусканием ферромагнитных и немагнитопроводящих грузов в робототехнических устройствах различного назначения. Магнитоэлектрический захват груза, преимущественно по конфигурации цилиндрический, содержит ярмо, неперемагничиваемый постоянный магнит, катушку обмотки управления, наружный полюс и оснащен поперечным полюсом и сердечником, на котором закреплены поперечный полюс и катушка. К ярму соосно прикреплены сердечник и намагниченный однонаправлено магнит, к которому прикреплен также соосно наружный полюс, образуя с ними в радиальном сечении Ш-образный магнитопровод, в котором в свою очередь сердечник, ярмо и поперечный полюс могут быть выполнены в виде монолитного Т-образного магнитопровода сердечника с магнитными свойствами наружного полюса. Захват может быть снабжен ферромагнитной пластиной, закрепляемой на немагнитопроводящем или на ферромагнитном грузе с низкими магнитными свойствами. Между наружной поверхностью поперечного полюса и внутренней поверхностью наружного полюса образован такой немагнитный зазор, что его магнитное сопротивление магнитному потоку от магнита намного больше, чем магнитное сопротивление тому же магнитному потоку при захвате груза, проходящему через наружный полюс, сердечник и ферромагнитные груз или пластину, и намного меньше магнитного сопротивления тому же магнитному потоку, замыкающемуся через наружный полюс и сердечник при отсутствии груза. При подаче импульса тока в катушку притягивающая сила захвата значительно уменьшается вплоть до ноля за счет отведения магнитного потока магнита от груза или пластины путем его замыкания через поперечный полюс на магнит. Достигается повышение энергоэффективности за счет повышения притягивающей силы захвата и снижения энергопотребления, упрощение конструкции, повышение надежности и ресурса работы, расширение возможностей использования. 4 з.п. ф-лы, 7 ил.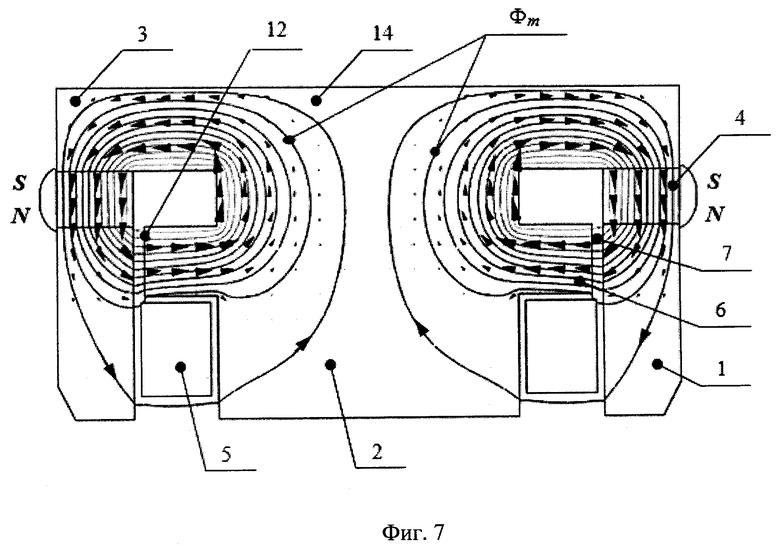
1. Магнитоэлектрический захват груза, содержащий плоское ярмо, неперемагничиваемый постоянный магнит, катушку обмотки управления и наружный полюс, отличающийся тем, что он преимущественно по конфигурации цилиндрический, снабжен сердечником и поперечным полюсом, при этом постоянный магнит и поперечный полюс выполнены кольцевыми, сердечник и наружный полюс выполнены соответственно в виде цилиндра и полого цилиндра, плоское ярмо выполнено в виде диска, а постоянный магнит выполнен высококоэрцитивным и намагничен однонаправленно по оси, перпендикулярной к его торцевой плоскости, причем диаметры наружных поверхностей постоянного магнита, наружного полюса и плоского ярма одинаковы, диаметр сердечника одинаков с диаметром внутренней поверхности кольца поперечного полюса и меньше диаметра внутренней поверхности наружного полюса, который больше диаметра наружной поверхности поперечного полюса, при этом к одной плоскости ярма прикреплены соосно с ним сердечник и постоянный магнит, к которому с его противоположной стороны от плоского ярма прикреплен также соосно своей плоской поверхностью наружный полюс, образуя с ними в радиальном сечении Ш-образный магнитопровод, причем противоположные, относительно плоского ярма, торцевые поверхности наружного полюса и сердечника примыкают к поверхности ферромагнитного груза при его захвате, а поперечный полюс своей внутренней поверхностью закреплен на наружной поверхности сердечника на осевом расстоянии от плоского ярма, большем или равном толщине постоянного магнита, но в пределах осевой длины наружного полюса, при этом на цилиндрической поверхности сердечника намотана и закреплена катушка обмотки управления, примыкающая к противоположной, относительно плоского ярма, плоскости кольца поперечного полюса, а образованный немагнитный зазор величиной δ между диаметральными наружной поверхностью поперечного полюса и внутренней поверхностью наружного полюса выполнен таким, что его магнитное сопротивление магнитному потоку от постоянного магнита при его прохождении через него и поперечный полюс намного больше, чем магнитное сопротивление магнитному потоку от постоянного магнита, проходящему через торцевые поверхности наружного полюса и сердечника и через ферромагнитный груз при его захвате, и намного меньше магнитного сопротивления магнитному потоку от постоянного магнита, замыкающемуся через эти же торцевые поверхности наружного полюса и сердечника при отсутствии ферромагнитного груза, причем площади торцевых поверхностей наружного полюса S1 и сердечника S2 со стороны ферромагнитного груза одинаковы, площадь торцевой поверхности постоянного магнита S3, примыкающей к наружному полюсу, больше площади наружной диаметральной поверхности поперечного полюса S4, обращенной к немагнитному зазору, а отношение площади S1 или S2 со стороны ферромагнитного груза к площади S3 равно отношению остаточной индукции постоянного магнита Br к максимальной магнитной индукции ненасыщенного в магнитном отношении материала наружного полюса или сердечника Вмакс и выполняется условие 0,5<(S1/S3)=(S2/S3)=(Br/Bмакс)<l, при этом толщина постоянного магнита dm по направлению его намагничивания превышает величину немагнитного зазора δ по направлению прохождения через него магнитного потока и удовлетворяется соотношение 1<(dm×S4)/(δ×S3)≤10, а наружный полюс, ярмо, сердечник и поперечный полюс выполнены из магнитомягких материалов с одинаковыми или близкими магнитными свойствами.
2. Магнитоэлектрический захват груза по п. 1, отличающийся тем, что он снабжен ферромагнитной пластиной, закрепляемой на немагнитопроводящем или на ферромагнитном грузе с низкими магнитными свойствами, которая выполнена в виде диска толщиной не менее четверти диаметра сердечника, при этом диаметр ферромагнитной пластины больше диаметра наружной поверхности наружного полюса, а противоположные, относительно плоского ярма, торцевые поверхности наружного полюса и сердечника примыкают к плоскости закрепленной на грузе ферромагнитной пластины при его захвате, причем магнитное сопротивление магнитному потоку от постоянного магнита, проходящему при захвате груза через торцевые поверхности наружного полюса и сердечника и через ферромагнитную пластину, намного меньше магнитного сопротивления магнитному потоку от постоянного магнита при его прохождении через немагнитный зазор величиной δ и поперечный полюс, которое в свою очередь намного меньше магнитного сопротивления магнитному потоку от постоянного магнита, замыкающемуся при отсутствии груза с закрепленной на нем ферромагнитной пластиной через эти же торцевые поверхности наружного полюса и сердечника, при этом ферромагнитная пластина выполнена из магнитомягкого материала с одинаковыми или близкими магнитными свойствами магнитомягких материалов, из которых выполнены наружный полюс, ярмо, поперечный полюс и сердечник.
3. Магнитоэлектрический захват груза по любому из пп. 1 или 2, отличающийся тем, что сердечник, ярмо и поперечный полюс выполнены в виде монолитного Т-образного магнитопровода сердечника из магнитомягкого материала с одинаковыми или близкими магнитными свойствами, что и магнитомягкий материал наружного полюса.
4. Магнитоэлектрический захват груза по любому из пп. 2 или 3, отличающийся тем, что, сердечник, ярмо, поперечный полюс или Т-образный магнитопровод сердечника, наружный полюс и ферромагнитная пластина выполнены из одного магнитомягкого материала.
5. Магнитоэлектрический захват груза по любому из пп. 1-4, отличающийся тем, что неперемагничиваемый кольцевой постоянный магнит выполнен в виде кольцевого слоя плоских прямоугольных или секторных по конфигурации отдельных неперемагничиваемых высококоэрцитивных постоянных магнитов, намагниченных однонаправленно и перпендикулярно к их торцевой плоскости, числом не менее двух, обращенных или примыкающих в слое последовательно своими боковыми поверхностями друг к другу, а своими торцами к плоской поверхности наружного полюса, образуя замкнутое кольцо, в котором все отдельные плоские постоянные магниты размещены в слое по направлению намагничивания в одном направлении, при этом каждый отдельный плоский постоянный магнит выполнен, в частности, из магнитотвердого спеченного материала типа SmCo или NdFeB с остаточной магнитной индукцией не менее 0,8 Тл.
| KR 20020035935 A, 16.05.2002 | |||
| Магнитное грузозахватное устройство | 1990 |
|
SU1775348A1 |
| US 5038128 A1, 06.08.1991 | |||
| Грузоподъемное магнитное устройство | 1982 |
|
SU1096186A1 |
