3 г S го 3 7 ЗОТ111Ц1Ю зтг 5 б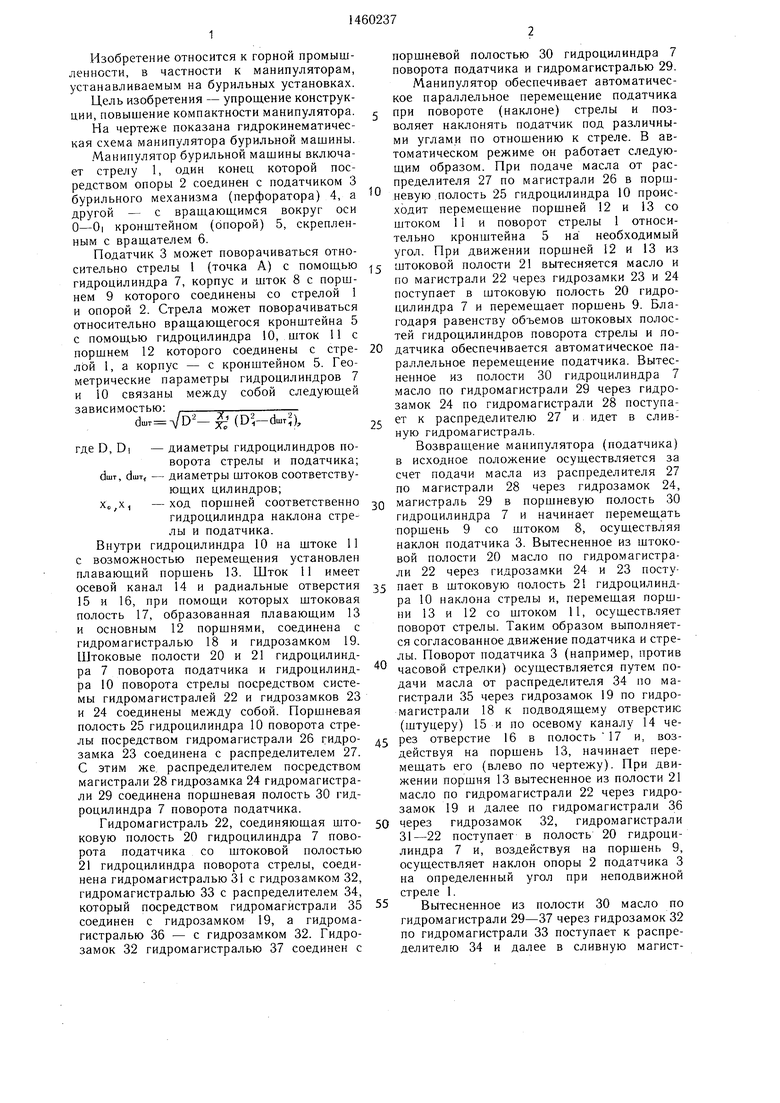

| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор бурильной установки | 1989 |
|
SU1760105A1 |
| Манипулятор | 1983 |
|
SU1155741A1 |
| Гидропривод бурильной установки | 1991 |
|
SU1788230A1 |
| Устройство для бурения шпуров и скважин | 1980 |
|
SU939758A1 |
| Гидропривод рабочего органа рыхлителя | 1986 |
|
SU1370199A2 |
| НАТЯЖНОЕ УСТРОЙСТВО СКРЕБКОВОГО КОНВЕЙЕРА ПОГРУЗОЧНОЙ МАШИНЫ | 1992 |
|
RU2057695C1 |
| Устройство для управления проходческим комбайном | 1981 |
|
SU985284A1 |
| Устройство для бурения шпуров | 1975 |
|
SU810951A1 |
| Гидропривод рабочего органа рыхлителя | 1982 |
|
SU1035152A1 |
| Рабочее оборудование экскаватора | 1985 |
|
SU1294924A1 |
Изобретение относится к горной промышленности, в частности к манипуляторам бурильных машин. Цель изобретения - уг1рош,ение конструкции и повышение ком-, пактности. Манипулятор включает стрелу 1, шарнирно соединенную с опорой 2 по- датчика 3 и кронштейном 5. На кронштейне 5 установлены вращатель 6 гидроцилиндра (ГЦ) 10 поворота стрелы 1 и ГЦ 7 поворота податчика, штоковые полости которых посредством гидромагистралей 22 и гидрозамков 23, 24 соединены между собой. Манипулятор снабжен плаваю- ш,им поршнем 13, размещенным в што- ковой полости ГЦ 10. Поршень 13 установлен на штоке 11 с возможностью относительного перемещения. Полость между плавающим и основным поршнями 12 и 13 ГЦ 10 сообщена с гидромагистралью 22 посредством осевого канала 14 в штоке 11. При подаче масла от распределителя 27 в поршневую полость 25 ГЦ 10 происходит поворот стрелы 1 относительно кронштейна 5. Благодаря равенству объемов штоковых полостей ГЦ поворота стрелы и податчика обеспечивается автоматическое параллельное перемещение податчика. Возвращение его в исходное положение осуществляется подачей масла из распределителя 27 по магистрали 28 через гидрозамок 24, магистраль 29 в поршневую полость 30 ГЦ 7. 1 3. п. ф-лы, 1 ил. SS (Л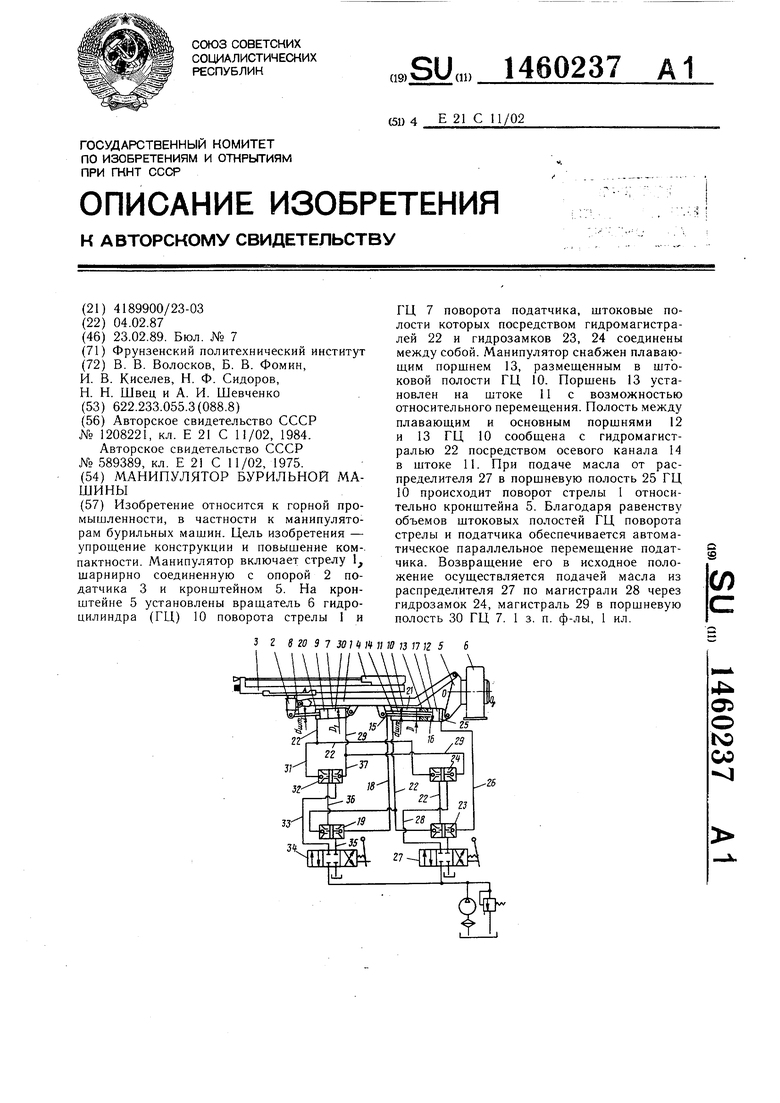
j«4;S l -ТтДи.Л
мпйт
05 О
ю
00
|
Изобретение относится к горной промышленности, в частности к манипуляторам, устанавливаемым на бурильных установках.
Цель изобретения - упрощение конструкции, повышение компактности манипулятора.
На чертеже показана гидрокинематическая схема манипулятора бурильной машины.
Манипулятор бурильной машины включает стрелу 1, один конец которой посредством опоры 2 соединен с податчиком 3 бурильного механизма (перфоратора) 4, а другой - с врашаюшимся вокруг оси О-0| кронштейном (опорой) 5, скрепленным с враш,ателем 6.
Податчик 3 может поворачиваться относительно стрелы 1 (точка А) с помошью гидроцилиндра 7, корпус и шток 8 с поршнем 9 которого соединены со стрелой 1 и опорой 2. Стрела может поворачиваться относительно вращающегося кронштейна 5 с помощью гидроцилиндра 10, шток 11 с поршнем 12 которого соединены с стре- лЬй 1, а корпус - с кронштейном 5. Геометрические параметры гидроцилиндров 7 и 10 связаны между собой следующей
зависимостью: ,-
du.T VD -x; (0,-ёшт),
где D, DI - диаметры гидроцилиндров поворота стрелы и податчика; duiT, dmr, - диаметры штоков соответствующих цилиндров;
х X, -ход поршней соответственно гидроцилиндра наклона стрелы и податчика.
Внутри гидроцилиндра 10 на штоке 11 с возможностью перемещения установлен плавающий поршень 13. Шток 11 имеет осевой канал 14 и радиальные отверстия 15 и 16, при помощи которых штоковая полость 17, образованная плавающим 13 и основным 12 поршнями, соединена с гидромагистралью 18 и гидрозамком 19. Штоковые полости 20 и 21 гидроцилиндра 7 поворота податчика и гидроцилиндра 10 поворота стрелы посредством системы гидромагистралей 22 и гидрозамков 23 и 24 соединены между собой. Поршневая полость 25 гидроцилиндра 10 поворота стрелы посредством гидромагистрали 26 гидрозамка 23 соединена с распределителем 27. С этим же. распределителем посредством магистрали 28 гидрозамка 24 гидромагистрали 29 соединена поршневая полость 30 гидроцилиндра 7 поворота податчика.
Гидромагистраль 22, соединяющая што- ковую полость 20 гидроцилиндра 7 поворота податчика со штоковой полостью 21 гидроцилиндра поворота стрелы, соединена гидромагистралью 31 с гидрозамком 32, гидромагистралью 33 с распределителем 34, который посредством гидромагистрали 35 соединен с гидрозамком 19, а гидромагистралью 36 - с гидрозамком 32. Гидрозамок 32 гидромагистралью 37 соединен с
поршневой полостью 30 гидроцилиндра 7 поворота податчика и гидромагистралью 29. Манипулятор обеспечивает автоматическое параллельное перемещение податчика при повороте (наклоне) стрелы и позволяет наклонять податчик под различными углами по отношению к стреле. В автоматическом режиме он работает следующим образом. При подаче масла от распределителя 27 по магистрали 26 в порш- левую полость 25 гидроцилиндра 10 происходит перемещение поршней 12 и 13 со штоком 11 и поворот стрелы 1 относительно кронштейна 5 на необходимый угол. При движении поршней 12 и 13 из 5 штоковой полости 21 вытесняется масло и по магистрали 22 через гидрозамки 23 и 24 поступает в штоковую полость 20 гидроцилиндра 7 и перемещает поршень 9. Благодаря равенству объемов штоковых полостей гидроцилиндров поворота стрелы и по- 0 датчика обеспечивается автоматическое параллельное перемещение податчика. Вытесненное из полости 30 гидроцилиндра 7 масло по гидромагистрали 29 через гидрозамок 24 по гидромагистрали 28 поступа- л ет к распределителю 27 и. идет в сливную гидромагистраль.
Возвращение манипулятора (податчика) в исходное положение осуществляется за счет подачи масла из распределителя 27 по магистрали 28 через гидрозамок 24, 0 магистраль 29 в поршневую полость 30 гидроцилиндра 7 и начинает перемещать поршень 9 со штоком 8, осуществляя наклон податчика 3. Вытесненное из штоковой полости 20 масло по гидромагистрали 22 через гидрозамки 24 и 23 посту- 5 пает в штоковую полость 21 гидроцилиндра 10 наклона стрелы и, перемещая поршни 13 и 12 со штоком 11, осуществляет поворот стрелы. Таким образом выполняется согласованное движение податчика и стрелы. Поворот податчика 3 (например, против часовой стрелки) осуществляется путем подачи масла от распределителя 34 по магистрали 35 через гидрозамок 19 по гидромагистрали 18 к подводящему отверстию (штуцеру) 15 и по осевому каналу 14 че- 5 рез отверстие 16 в полость 17 и, воздействуя на поршень 13, начинает перемещать его (влево по чертежу). При движении поршня 13 вытесненное из полости 21 масло по гидромагистрали 22 через гидрозамок 19 и далее по гидромагистрали 36 50 через гидрозамок 32, гидромагистрали 31-22 поступает в полость 20 гидроцилиндра 7 и, воздействуя на поршень 9, осуществляет наклон опоры 2 податчика 3 на определенный угол при неподвижной стреле 1.
55 Вытесненное из полости 30 масло по гидромагистрали 29-37 через гидрозамок 32 по гидромагистрали 33 поступает к распределителю 34 и далее в сливную магистраль. Поворот или наклон опоры 2 по- датчика 3 в противоположную сторону (например, по часовой стрелке) осуществляется за счет подачи масла от распределителя 34 по гидромагистрали 33 через гидрозамок 32, гидромагистраль 37-29 в полость 30 гидроцилиндра 7. Вытесненное из полости 20 гидроцилиндра 7 масло по гидромагистрали 22-31 через гидрозамок 32, по гидромагистрали 36, через гидрозамок 19, по гидромагистрали 22 поступает в штоковую полость 2 гидроцилиндра 10 и, воздействуя на поршень 13, перемещают его. При перемещении порщня 13 масло их полости 17 через отверстие 16, осевой канал 14, отверстие 15 по магистрали 18 через гидрозамок 19 по гидромагистрали 35 поступает к распределителю 34 и далее в сливную магистраль.
Формула изобретения 1. Манипулятор бурильной машины, включающий стрелу, щарнирно соединенную
0
с опорой податчика и кронщтейном, на котором установлен вращате-ть гидроцилиндра поворота стрелы, гидроцилиндр поворота податчика, щтоковые полости которых пос-. редством гидромагистралей и гидрозамков соединены между собой, отличающийся тем, что, с целью упрощения конструкции и повышения компактности, манипулятор снабжен плавающим поршнем, размещенным в штоковой полости гидроцилиндра поворота стре-ты и установленным на штоке с возможностью относительного перемещения, причем полость между плавающим и основным поршнями указанного гидроцилиндра сообщена с гидромагистралью.
| Манипулятор бурильной машины | 1984 |
|
SU1208221A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Породоразрушающий инструмент | 1975 |
|
SU589389A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
