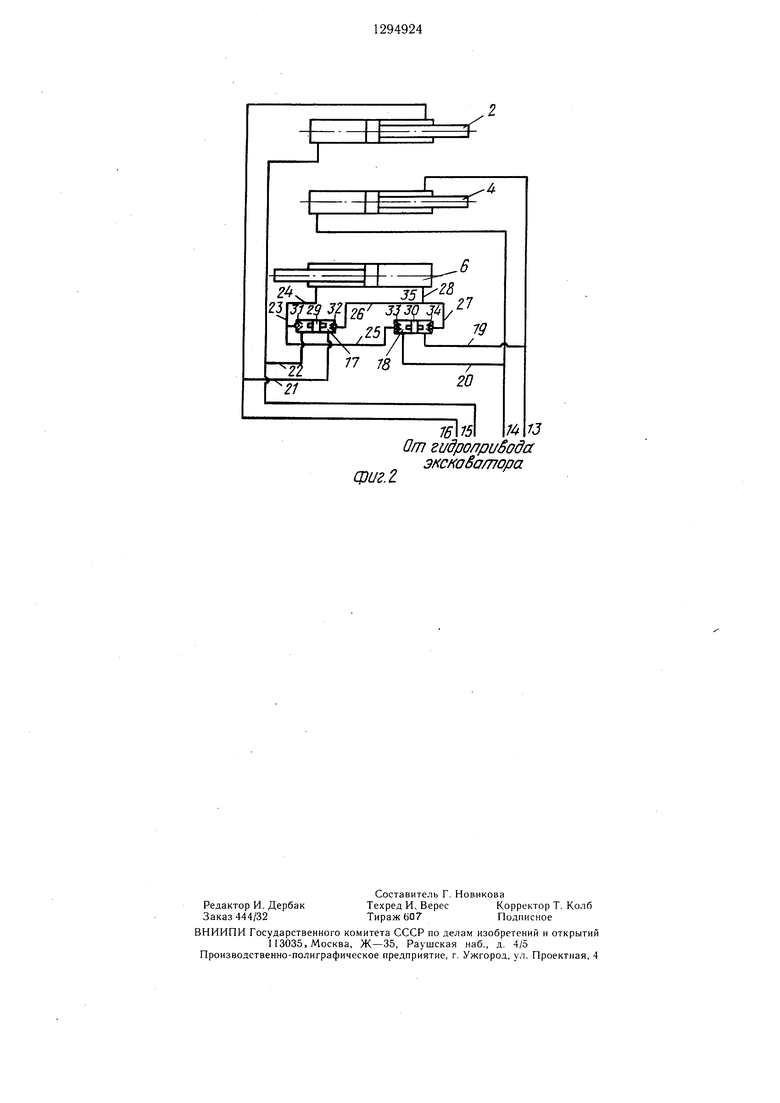
При подаче жидкости в штоковую полость гидроцилиндра 2 управления рукоятью по магистрали 16 она одновременно поступает через магистраль 21 в гидрозамок 17, отжимает обратный клапан 32 и через ма- 5 гистрали 26 и 28 попадает в поршневую полость гидроцилиндра 6, одновременно перемещая плавающий порщень 29, который открывает обратный клапан 31 и соединяет штоковую полость гидроцилиндра 6 чегидравлическая схема увязки ю рез магистрали 24, 23 и 22 со сливной
магистралью 15. Происходит обратное перемещение штоков гидроцилиндров.
Изобретение относится к строительному I дорожному машиностроению, в частности к гидравлическим экскаваторам, и может быть использовано, например, для разработки прочного и мерзлого грунта.
Цель изобретения - повышение произ- 1н)дительности при разработке прочных и «ер.члых грунтов.
На фиг. 1 представлено рабочее оборудование экскаватора, обший вид; на фиг. 2
гидроцилиндра управления полиспастным механизмом и гидроцилиндров управления рукояти и ковша.
Рабочее оборудование навешивается на базовую машину 1, которая обеспечивает
С целью постоянного натяжения каната 11 в магистрали 28 устанавливается
подачу рабочей жидкости к гидроцилиндру 2 5 дроссель 35 (или подпорный клапан), ко- управления рукоятью 3, гидроцилиндру 4 уп- торый обеспечивает предварительное перемеравления ковшом 5 и гидроцилиндру 6 управления полиспастным механизмом. Последний установлен на стреле 7, шарнирно сочлененной с рукоятью 3, и является п приспособлением для создания дополнительного напорного усилия. Полиспастный механизм связан со стрелой гидроцилиндром 6 и траверсами 8 и 9, первая из которых размещена на штоке гидроцилиндра, а другая шарнирно установлена на стре- 25 ле посредством пальца 10. Полиспастный механизм связан с ковшом 5 канатом 11, который огибает блоки 12 полиспастного механизма.
Гйдроцилиндр 6 управления полиспастщение штока гидроцилиндра 6, а затем совместное синхронное перемещение штоков гидроцилиндров 2,и 6.
Одновременное подключение гидрозамка 18 через магистрали 26 и 27 не оказывает отрицательного влияния на синхронность работы, так как обратный клапан 34 заперт.
Движение ковша по траектории копания вызывает смещение каната 11, а следовательно, и направлена сила его натяжения, которая воздействует через блок 12 на траверсу 9.
Совместная работа гидроцилиндра.4 упным механизмом подключается к напорным равления ковшом и гидроцилиндра 6 управ- и сливным магистралям 13-16 гидроцилиндра 2 управления рукоятью и гидроцилиндра 4 управления ковшом через гидрозамки 17 и 18 двустороннего действия и магистрали 19-28. Гидрозамки 17 и 18 двустороннего действия включают плавающие поршни 29 и 30 и обратные клапаны 31-34. Дроссель 35 обеспечивает постоянное натяжение каната 11.
Рабочее оборудование экскаватора вы35
ления полиспастным механизмом аналогична изложенному.
Формула изобретения
Рабочее оборудование экскаватора, включающее щарнирно сочлененные стрелу и рукоять, ковш, шарнирно связанный с рукоятью, гидроцилиндры управления стреполняет операции копания и разгрузки. 40 рукоятью и ковшом, приспособление При подаче жидкости в поршневую по- для создания дополнительного напорного лость гидроцилиндра 2 управления ру-усилия и гидромагистрали, отличающееся
коятью по магистрали 15 она одновремен- тем, что, с целью повышения производи- но поступает через магистраль 22 в гид- тельности при разработке прочных и мерз- розамок 17, отжимает обратный клапан 31 и лых грунтов, приспособление для создания через магистрали .23 и 24 попадает в што- 45 дополнительного напорного усилия вы- ковую полость гидроцилиндра 6, одновре- полнено в виде полиспастного механизма, менно перемещая плавающий поршень 29, установленного на стреле экскаватора пос- который открывает обратный клапан 32 и сое-редством гидроцилиндра управления полисдиняет поршневую полость гидроцилиндра 6 пастным механизмом и траверс, одна из ко- через магистрали 28, 26 и 21 со слив- торых размещена на щтоке гидроцилиндра, ной магистралью 16. Происходит синхрон- а другая щарнирно установлена на стреле, ное перемещение щтоков гидроцилиндров причем Полиспастный механизм связан с ков- 2 и 6 и, следовательно, увеличиваетсяшом посредством каната, а поршневые и
усилие резания на зубьях ковша.штоковые полости гидроцилиндров управлеПодключение напорной магистрали гид- ния рукоятью и ковшом соединены пос- розамка 18 через магистрали 23 и 25 не се редством гидрозамков двустороннего дейст- влияет на синхронность работы гидроци-вия с поршневой и штоковой полостью
линдров, т. е. жидкость запирается обрат-гидроцилиндра управления полиспастным
ным клапаном 33.механизмом.
дроссель 35 (или подпорный клапан), ко- торый обеспечивает предварительное перемещение штока гидроцилиндра 6, а затем совместное синхронное перемещение штоков гидроцилиндров 2,и 6.
Одновременное подключение гидрозамка 18 через магистрали 26 и 27 не оказывает отрицательного влияния на синхронность работы, так как обратный клапан 34 заперт.
Движение ковша по траектории копания вызывает смещение каната 11, а следовательно, и направлена сила его натяжения, которая воздействует через блок 12 на траверсу 9.
Совместная работа гидроцилиндра.4 управления ковшом и гидроцилиндра 6 управ-
равления ковшом и гидроцилиндра 6 управ-
ления полиспастным механизмом аналогична изложенному.
Формула изобретения
Редактор И. Дербак Заказ 444/32
ВНИИПИ Государственного комитета СССР по делам изобретений и открытий
I 13035, Москва, Ж-35, Раушская наб., д. 4/5 Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
фиг.1
От гидролрибода энскобашора
Составитель Г. Новикова Техред И.. ВересКорректор Т. Колб
Тираж Ь07Подписное
| название | год | авторы | номер документа |
|---|---|---|---|
| Рабочее оборудование обратной механической лопаты | 1989 |
|
SU1701833A1 |
| Ковш экскаватора | 1980 |
|
SU929787A1 |
| Гидропривод управления ковшом гидравлического экскаватора | 1988 |
|
SU1548367A1 |
| Двухпоточный гидравлический привод рабочего оборудования одноковшового экскаватора | 1986 |
|
SU1330277A1 |
| Гидравлический экскаватор для образования траншей под защитой тиксотропного раствора | 1987 |
|
SU1461841A1 |
| Двухпоточный гидропривод экскаватора | 1985 |
|
SU1293288A1 |
| Гидравлический привод рабочего оборудования одноковшового экскаватора | 1986 |
|
SU1313979A1 |
| Гидравлический привод рабочего оборудования одноковшового экскаватора | 1980 |
|
SU949091A1 |
| Гидропривод землеройной машины | 1980 |
|
SU1036862A1 |
| Двухпоточный гидропривод экскаватора | 1979 |
|
SU891869A1 |
Изобретение относится к строительному и дорожному машиностроению, в частности к гидравлическим экскаваторам, и может быть использовано для разработки прочного и мерзлого грунта. Цель - повышение производительности при разработке прочных и мерзлых грунтов. Для этого приспособление для создания дополнительного напорного усилия вынолнено в виде по- лиспастного механизма (ПМ). Он связан со стрелой 7 посредством гидроцилиндра (ГЦ) 6 управления ПМ и траверс 8 и 9. Траверса 8 размешена на штоке 6, а траверса 9 шарнирно установлена на стреле 7 посредством пальца 10. С ковшом 5 ПМ связан посредством каната II. Поршневые и штоковые полости ГЦ 2 управления рукоятью 3 и ГЦ 4 управления ковшом 5 соединены через гидрозамки двухстороннего действия с поршневой и штоко- вой полостями ГЦ 6. При подаче жидкости в поршневые полости ГЦ 2 или ГЦ 4 происходит синхронное перемещение штоков ГЦ 2 и 6 или ГЦ 4 и 6. При этом увеличивается усилие резания на зубьях ковша. 2 ил. (Л со N со tsD 4
| Рабочее оборудование одноковшового экскаватора | 1975 |
|
SU647409A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Рабочее оборудование одноковшового экскаватора | 1972 |
|
SU613019A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
