)
11
Изобретение относится к машиностроению, а именно к гидроприводам исполнительных механизмов машин, может быть использовано, например, в станкостроительной промьшшенности Дл остановки и фиксации исполнительных механизмов в заданной координате и является усовершенствованием, изобретения по авт.св. № 1280207.
Целью изобретения является повышение надежности и точности позиционирования путем стабилизации нагрузки на гидродвигателе в момент позиционирования.
На чертеже представлена принципиальная гидравлическая схема привода.
Гидравлический позиционный привод содержит напорную 1 и сливную 2 гидролинии, гидродвигатель 3, подклю- ченный к напорной 1 и сливной 2 гидролиниям через направляющий гидрораспределитель 4, крановый дроссели- гидрораспределитель 5 с входом 6 и выходом 7, гидроуправляемый тормоз, включающий основной гидроцилиндр 8 с поршневой и штоковой полостями 9 и 10, дополнительный гидроцилиндр 11, поршневая полость 12 которого подключена к штоковой полости 10 и входу 6 гидрораспределителя 5, гидроуправляемый двухпозиционный трехлинер гаый гидрораспределитель 13, выполненный с возможностью сообщения поршневой полости 9 к напорной 1 и сливной 2 гидролиниям и подпружиненный фрикционный замыкатель 14.
Гидроуправляемый четырехлинейный клапан 15, установленный между направляющим гидрораспределителем 4 и гидродвигателем 3, снабжен дросселем 16. Электроуправляемьш двухпозиционный четырехлин ейный гидрораспределитель 17 выполнен с возможностью сообщения входа 6 и выхода 7 гидрораспределителя 5 соответственно с напорной 1 и сливной 2 гидролиниями..
Привод работает следуюш;им образом В зависимости от необходимого направления вращения выходного звена (не обозначено) гидродвигателя 3 на- правляющий гидрораспредели тель 4 устанавливается в одну из крайних по чертежу позиций. Рабочая жидкость о направляющего гидрораспределителя 4 поступает через гидроуправляемый четырехлинейный клапан 15 в гидродвигатель 3. Вместе с выходным звеном
0
0
5
0
5
0
5
0
5
гидродвигателя 3 вращается крановый дросселирующий гидрораспределитель 5. При зтом рабочая жидкость из напорной гидролинии 1 через гидроуправляемый двухпозиционный трехлинейный гидрораспределитель 13 поступает в поршневую полость 9 гидроцилиндра 8, который растормаживает гидроуправляемый тормоз, Гидроуправляемые четырехлинейный клапан 15 и двухпозиционный трехлинейный гидрораспределитель 13 находятся в исход1€ых положениях, поскольку выход 7 кранового дросселирующего гидрораспределителя 5 связан со сливной гидролинией 2 через элек- троуправляемый четырехлинейный гидрораспределитель 17. При подходе к заданной координате позиционирования, менее чем за один оборот выходного звена гидродвигателя 3, подается электрический сигнал на электроуп- равляе1-1ый четырехлинейный гидрорас- пределитель 17, тем самым обеспечивается подключение входа 6 кранового, дросселирующего гидрораспределителя : 5, штоковой полости 10 гидроцилиндра 7 и поршневой полост г 12 дополнительного гидроцилиндра 11 к напорной гидролинии 1 и отсоединение вькода 7 гидрораспределителя от сливной гидролинии- 2.
Величина давления в напорной гидролинии 1 определяется нагрузкой гидродвигателя 3, при увеличении ко- , торой давление растет. Давление в штоковой полости 10. гидроцилиндра 8 частично компенсирует усилие, создаваемое давлением в поршневой полости 9. Активное усилие гидроцштиндров уменьшается и пружины (не обозначены) гидроуправляемого тормоза стремятся увеличить тормозной момент, однако на них действует усилие, создаваемое давлением в поршневой полости 12 дополнительного гидроцилиндра 11, Площадь поршня (не обозначен) со стороны поршневой полости дополнительного гидроцилиндра 11 подобрана таким образом, что создаваемое им усилие в сумме с усилием, которое возникает на гидроцилиндре 8 вследствие разности площадей поршня в штоковой и поршневой полостях 9 и 10, противодействует усилию пружин гидроуправляемого тормоза пропорционально давлению в напорной гидролинии 1, Этим реализуется заданная зависимость тормозного момента от давления в напорной гидролинии 1. Таким образом на гидродвигателе 3 поддерживается заданный крутящий момент, который не зависит от момента сопротивления нагрузки. В точке позиционирования открывается проходное сечение кранового дросселирующего гидрораспределителя 5 и рабочая жидкость поступает
1460436
теля 5 разобщается с напорной гидролинией 1 . Гидроуправляемые двухпози- ционный трехлинейный гидрораспределитель 13 и четырехлинейный клапан 15 также устанавливается в исходные позиции. Рабочая жидкость от напорной гидролинии 1 поступает в гидродвигатель 3 и поршневую полость 9
,bj,ijx4.i Г1 JlWJJLLin ССу lU iiUJlUl- 1 Ъ ,7
в управляющие полости (не обозначены) гидроцилиндра 8. Привод начинает двигидроуправляемых двухпозиционногожение до следующей точки позиционитрехлинейного гидрораспределителя 13рования.
и четырехлинейного клапана 15. Гидро- Повьтение точности позиционироЬауправляемый четырехлинейный клапанния привода достигается стабипиза15, включаясь, перекрьшает гидроли- igцией величины выбега за счет подцернии (не обозначены), идущие к гидро-жания крутящего момента на выходном
двигателю 3, и соединяет через дрос-звене гидродвигателя 3 во время позисель 16 гидролинии 1 и 2, идущие отционирования. Повышение надежности
направляющего гидрораспределителя 4,работы привода достигается исключеа гидрораспределитель 13 сообщает по-JQнием возможности самопроизвольного лость 9 гидроцилиндра 8 со сливной
гидролинией 2. Усилия дополнительного гидроцилиндра 11 не достаточно для противодействия пружинам гидро13 и четырехлинейный клапан 15 во включенном состоянии.
30
Формула изоб
р е т е н и я
зг1пуска привода после позиционирования за счет того, что в напорной 1 и сливной 2 гидролиниях после позиционирования сохраняется необходимый управляемого тормоза. Поэтому пружи- 25 перепад давлений, который подцержи- ны создают усилие, обеспечивающее вает гидроуправляемые двухпозицион- фрикционное торможение выходного зве- „ый трехлинейный гвдрораспределитель на гидродвигателя 3. Для повторения цикла позиционирования снимается напряжение с электроуправляемого четы-., рехлинейного гидрораспределителя 17, который устанавливается в исходную позицию.
При этом управляющие полости гид- роуправляемых двухпозиционного трехлинейного гидрораспределителя 13 и четырехлинейного клапана 15, а также поршневая полость 12 дополнительного гидроцилиндра 11 и штоковая полость 10 гидроцилиндра 8 сообщаются через электроуправляемый четырехлинейный гидрораспределитель 17 со сливной гидролинией 2, причем полости 10 и 12 гидроцилиндров 8 и 11 соединяются
35
40
с злектроуправляемым четырехлинейным гидрораспределителем 17 через крановый дросселируюш 1й гидрораспределитель 5. Одновременно вход 6 кранового дросселирующего гидрораспр еделиГидравлический позиционный привод по авт.св. № 1280207, отличающийся тем, что, с целью повышения надежности и точности позиционирования путем стабилизации нагрузки на гидродвигателе в момент позиционирования, гидроуправляемый тормоз снабжен дополнительным гидроципинд- ром одностороннего действия, поршневая полость которого подключена к штоковой полости основного гидроцилиндра и к входу кранового дросселирующего гидрораспределителя, при этом гидроуправляемый четьфехлинейный клапан снабжен дросселем, установленным между напорной и сливной гидролиниями.
1460436
теля 5 разобщается с напорной гидролинией 1 . Гидроуправляемые двухпози- ционный трехлинейный гидрораспределитель 13 и четырехлинейный клапан 15 также устанавливается в исходные позиции. Рабочая жидкость от напорной гидролинии 1 поступает в гидродвигатель 3 и поршневую полость 9
,bj,ijx4.i Г1 JlWJJLLin ССу lU iiUJlUl- 1 Ъ ,7
гидроцилиндра 8. Привод начинает дви13 и четырехлинейный клапан 15 во включенном состоянии.
зг1пуска привода после позициониров ния за счет того, что в напорной и сливной 2 гидролиниях после пози ционирования сохраняется необходим перепад давлений, который подцержи вает гидроуправляемые двухпозицион „ый трехлинейный гвдрораспределите
Формула изоб
р е т е н и я
зг1пуска привода после позиционирования за счет того, что в напорной 1 и сливной 2 гидролиниях после позиционирования сохраняется необходимый перепад давлений, который подцержи- вает гидроуправляемые двухпозицион- „ый трехлинейный гвдрораспределитель
зг1пуска привода после позиционирования за счет того, что в напорной 1 и сливной 2 гидролиниях после позиционирования сохраняется необходимый 5 перепад давлений, который подцержи- вает гидроуправляемые двухпозицион- „ый трехлинейный гвдрораспределитель
5
0
Гидравлический позиционный привод по авт.св. № 1280207, отличающийся тем, что, с целью повышения надежности и точности позиционирования путем стабилизации нагрузки на гидродвигателе в момент позиционирования, гидроуправляемый тормоз снабжен дополнительным гидроципинд- ром одностороннего действия, поршневая полость которого подключена к штоковой полости основного гидроцилиндра и к входу кранового дросселирующего гидрораспределителя, при этом гидроуправляемый четьфехлинейный клапан снабжен дросселем, установленным между напорной и сливной гидролиниями.
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидравлический позиционный привод | 1985 |
|
SU1280207A1 |
| Гидравлический позиционный привод | 1988 |
|
SU1668746A1 |
| ГИДРАВЛИЧЕСКАЯ СИСТЕМА РУЛЕВОГО УПРАВЛЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА НА ГУСЕНИЧНОМ ХОДУ | 2013 |
|
RU2531425C2 |
| УСТРОЙСТВО ДЛЯ ПОДАЧИ ДЛИННОМЕРНОГО ПРОКАТА В ЗОНУ ОБРАБОТКИ | 1994 |
|
RU2104115C1 |
| Гидравлический привод | 1982 |
|
SU1134810A1 |
| МЕХАНИЗМ ПЕРЕМЕЩЕНИЯ СТВОРОК РАЗДВИЖНОЙ ЧАСТИ КРОВЛИ СТАДИОНА | 2014 |
|
RU2556098C1 |
| БУРИЛЬНАЯ МАШИНА | 1994 |
|
RU2084626C1 |
| Гидропривод вращательно-подающего механизма бурильной машины | 1988 |
|
SU1587186A1 |
| САМОХОДНАЯ МАШИНА С ОБЪЕМНОЙ ГИДРОПЕРЕДАЧЕЙ | 2002 |
|
RU2241609C2 |
| ГИДРАВЛИЧЕСКИЙ БЛОК РЕГУЛИРОВАНИЯ ДАВЛЕНИЯ | 2020 |
|
RU2730560C1 |
Изобретение может быть исполь- зойано в станкостроительной промышленности для остановки и фиксации исполнительных механизмов в заданной координате. Цель изобретения - повышение надежности и точности позиционирования привода путем стабилизации нагрузки на гидродвигателе в момент позиционирования. Гидроуправляемый тормоз включает основной гидроцилиндр 8 с поршневой 9 и штоковой 10 полостями, дополнительный гидроцилиндр 11. Поршневая полость 12 гидроцилиндра 11 подключена к полости 10 и входу 6 гидрораспределителя 5. Гидроуправляемый четырехлинейный клапан 15 снабжен дросселем 16, установленным между напорной 1 и сливной 2 гидролиниями. Исключается возможность самопроизвольного запуска после позиционирования за счет того, что в магистралях 1,2 сохраняется необходимый перепад давлений, к-рый поддерживает гидрорас- пределитель 13 и клапан 15 во включенном состоянии. 1 ил. с (Л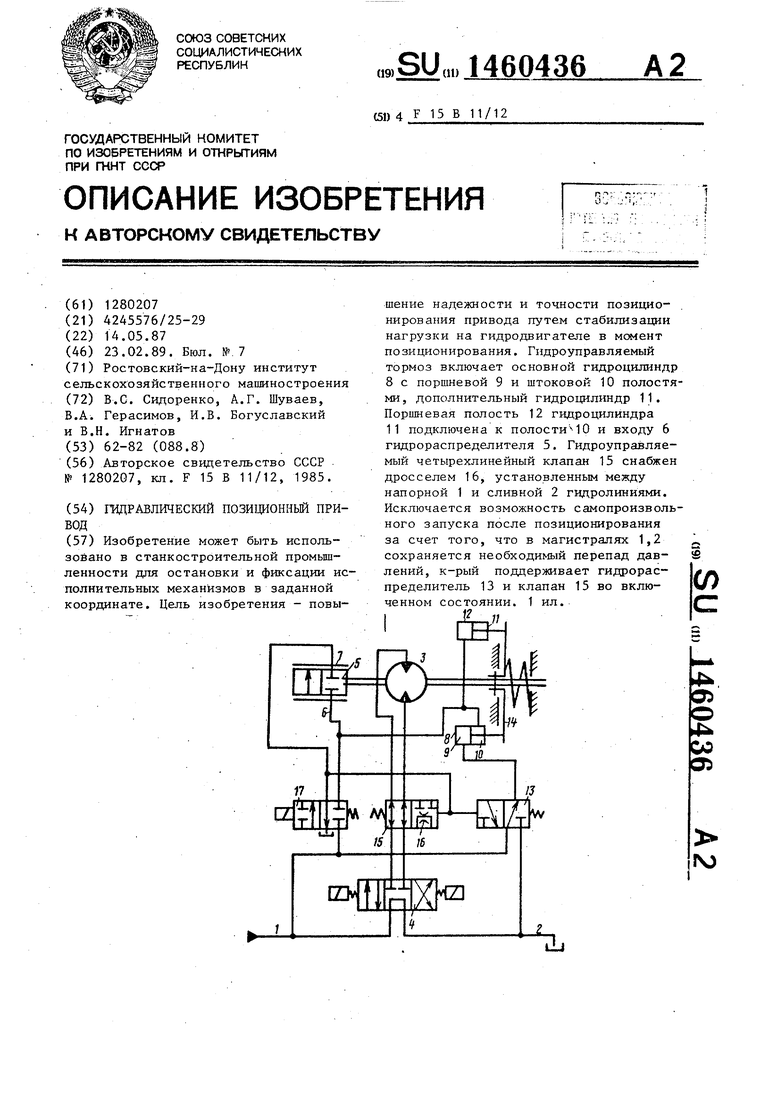
| Гидравлический позиционный привод | 1985 |
|
SU1280207A1 |
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
