сечеиае Д-Д на фиГа9 на фиг Л 2 - се 20 поверхности 28 корпуса прибора 27,
чение Е-Е на фиго9| на фиг.13 ление захвата.
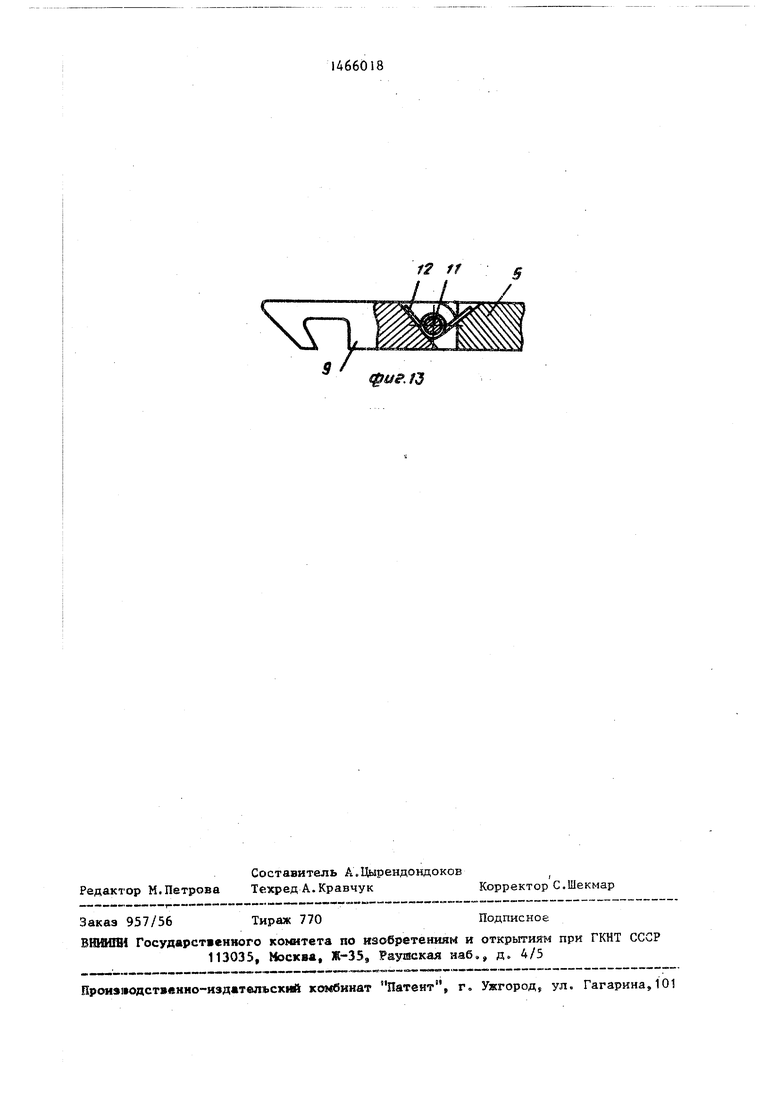
Ручка-съемник содермзгт П-образный корпус J толкатели 2 закрепленные ка полкак 3 П-образного корпуса 1 при помощи осей 4, тягк 5 установ леннь::е на полкак 3. при помощи осей 6 и фиксирующиеся в опр(вделен:ном ложекаи при помоЕда фиксаторов выпол-ЗО ненных в виде шариков 7 подпрз жинен- ных пружи.нами 8, эахза Гы 9з установленные в пазах Ш тяг 5j прикрепленных t: ним осями 1 г, и под пружинеЕшгх пружр1нами 52, которые размещены в пазах 3 и 14 тяг н зазшатов соответ ственяос Для размещения шариков 7 и пружин 8 в тягах 5 выполнены углубления 15, а для обеспечения фиксации
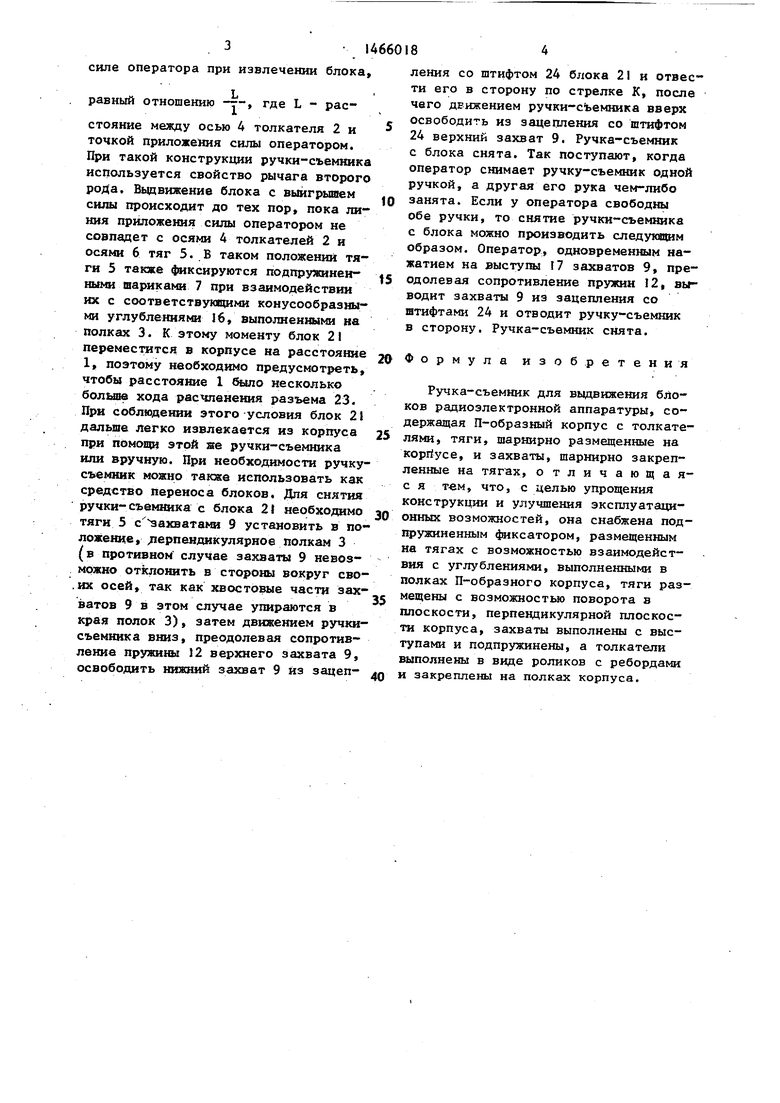
креп- а реборды 20 толкателей 2 входят в зацепление с кромками 29 опорных поверхностей 28 и точно фиксируют ручку-съемник по отношению к вьщвигае- 25 мому блоку 2I и корпусу прибора 27 3 вертикальном отношении, что повышает удобство пользования ручкой- , так как оператору при . этом нет необходимости следить за тем, чтобы ручка-съемник под действием своего веса не скользила вниз. Потянув за ручку 30 съемника по стрелке М, оператор начинает извлече- ние блока 21 из корпуса прибора 27. При этом шарики 7 благодаря наклонным стенкам конусообразных углублений 16, преодолевая сопротивление пружин 8, утапливаются в углублениях i5 тяг 5 и дают возможность тя-.
35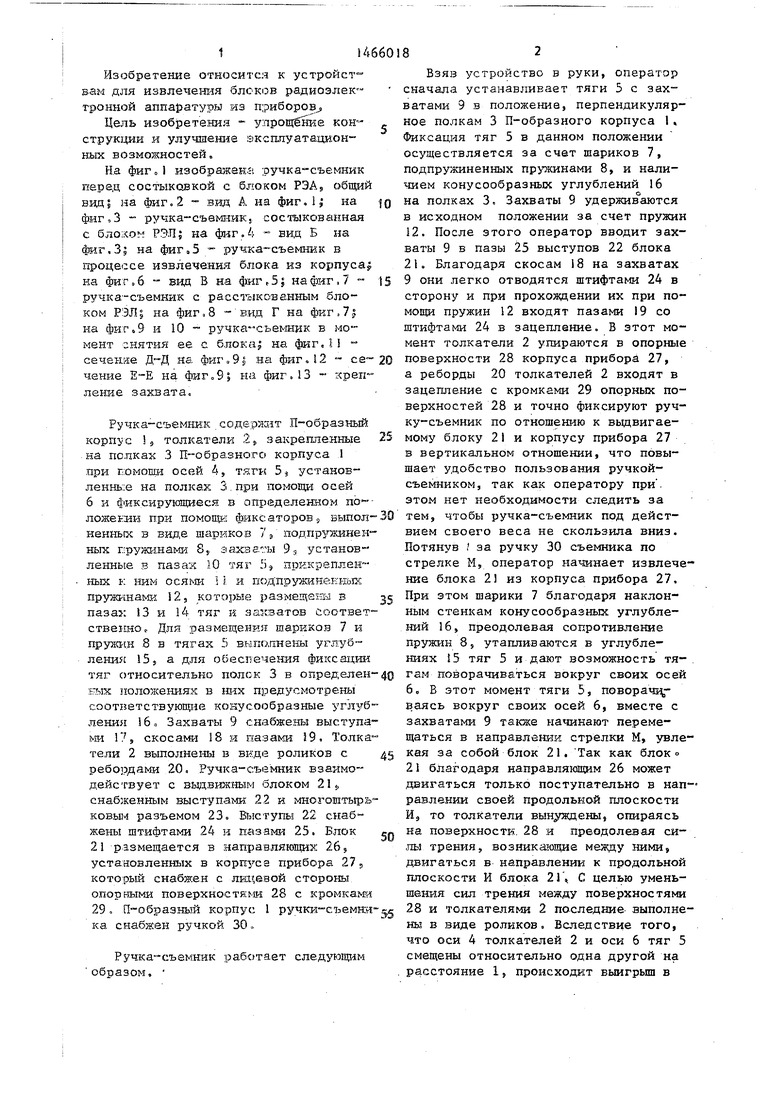
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для установки и извлечения блоков радиоэлектронной аппаратуры | 1988 |
|
SU1610606A1 |
| Ручка-съемник для установки и извлечения выдвижных блоков радиоаппаратуры | 1982 |
|
SU1070711A1 |
| Радиоэлектронный блок | 1988 |
|
SU1540045A1 |
| Устройство для установки и извлечения блоков радиоэлектронной аппаратуры | 1984 |
|
SU1210239A1 |
| Радиоэлектронный блок | 1988 |
|
SU1638812A1 |
| Натяжной замок | 1985 |
|
SU1313989A1 |
| Выдвижная ручка | 1984 |
|
SU1215196A1 |
| Устройство для установки радиоэлектронных блоков | 1985 |
|
SU1267637A1 |
| Устройство для изготовления гиперболоидных контактных узлов Карташева В.В. | 1987 |
|
SU1554058A1 |
| ЗАМОК С КОДОВЫМ УСТРОЙСТВОМ | 2008 |
|
RU2377376C1 |

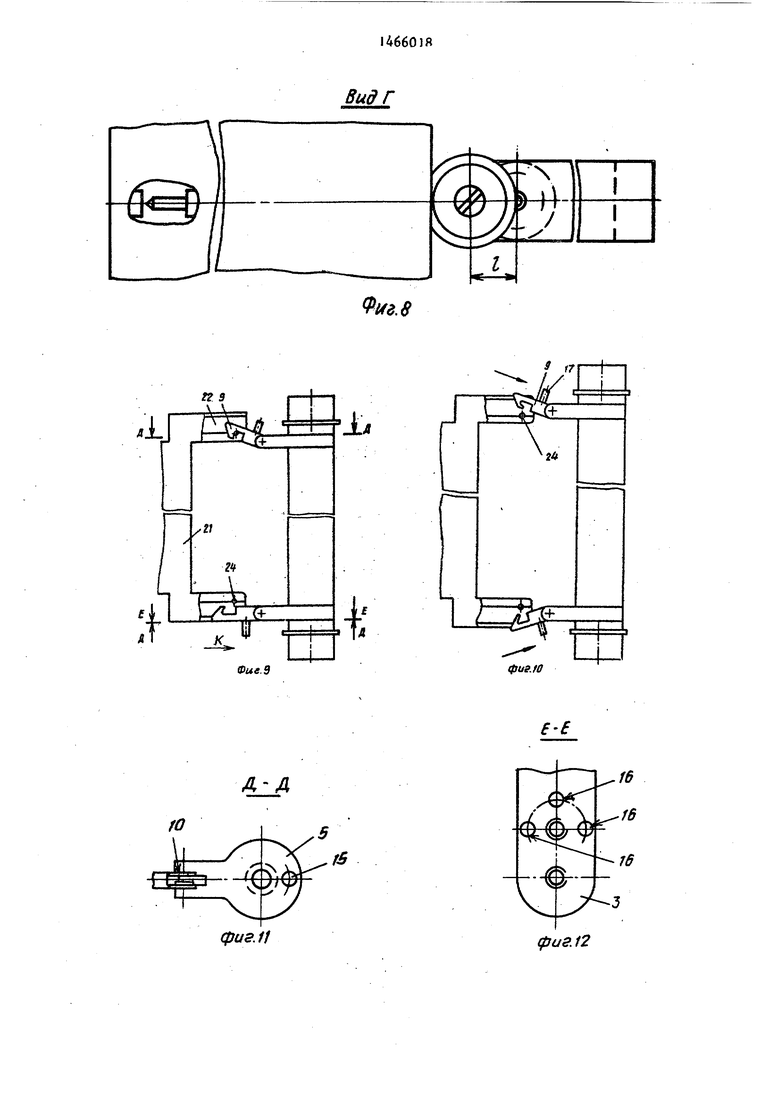
Изобретение может быть использовано для извлечения блоков радиоэлектронной аппаратуры. Ручка-съемник (PC) содержит П-обраэный корпус 1, на полках 3 которого закреплены толкатели 2 в виде роликов с ребордами 20, и тяги (Т) 5, фиксирующиеся в определенном положении при помощи фиксаторов, выполненных.в виде подпружиненных пру/кинами 8 шариков 7, В пазах Т 5 шарнирно закреплены захваты 9, подпружиненные пружинами 12 и имеющие выступы 17, скосы 18 и пазы 19. PC взаимодействует с выдвижным блоком 21. Вначале устанавливают Т 5 с захватами 9 в положение, перпендикулярное полкам 3. Фиксация Т 5 осуществляется за счет подпружи- ненньпс шариков 7 и конусообразных углублений 16 на полках 3. Затем вводят захваты 9 в пазы выступов 22 вьщ- вижного блока 21. Благодаря скосам 18 захваты 9 отводятся штифтами 24 выступов 22 в сторону и входят пазами 19 с ними в зацепление. Толкатели 2 упираются в опорные поверхности 28 корпуса прибора 27, его реборды 20 входят в зацепление с кромками 29 опорных поверхностей 28 и точно фиксируют PC по отношению к выдвижному блоку 21 и корпусу прибора 27. PC удобна в работе. 13 ил. а (Л
тяг относительно полок 3 в определен-40 гам поворачиваться вокруг своих осей
Еых положениях в 1шх предусмотрены соответствующие конусообразные углубления 16, Захваты 9 снабже:яь: выступами 17, скосами 18 и пазами 19. Толкатели 2 выполнены в ВЕД12 роликов с ребордами 20. Ручка-съемник взаимодействует с выдвизк:ны.м блоком 21., снабженным выступами 22 и многоготьгрь- ковым разъемом 23. Выступы 22 снабжены штифтами 24 и пазами 25. Блок 21 размещается в направляющих 26, установленных в корпуса прибора 27, который снабжен с лк.г ,евой стороны опорттми поверхностями 28 с кромками
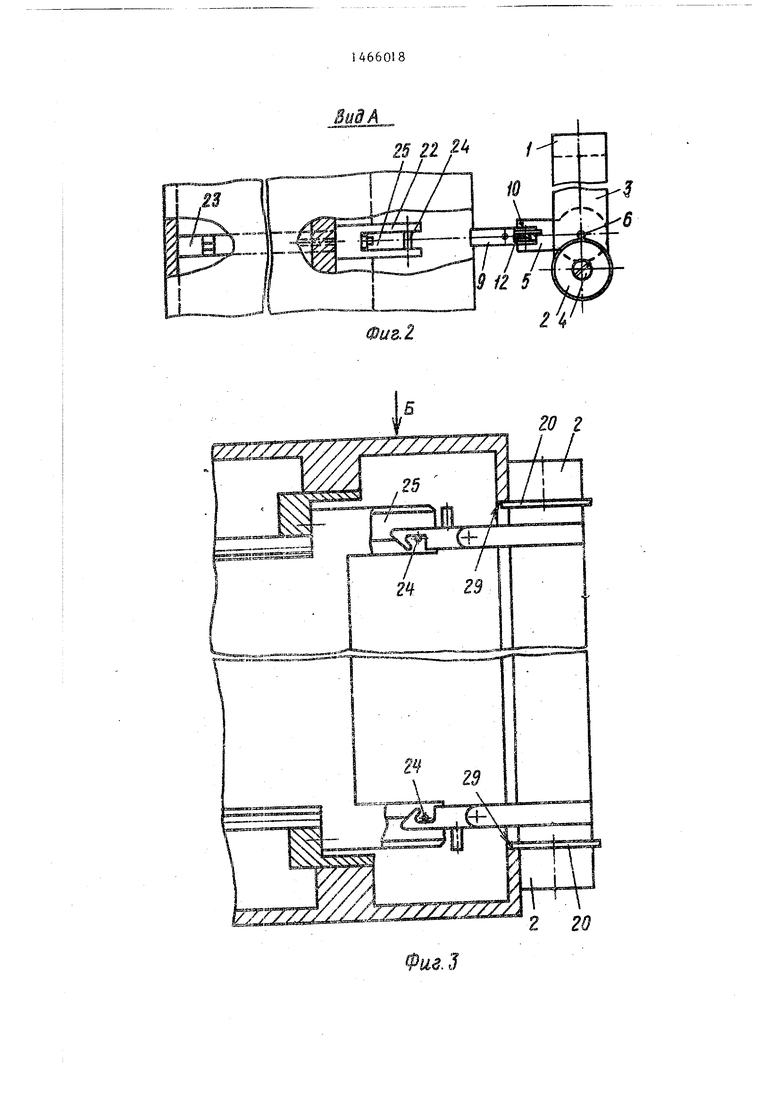
29, П образнк(й корпус 1 ручкк -съемн: 1- 28 и толкателями 2 последние- выполне- ка снабжен ручкой 30,ны в виде роликов. Вследствие того,
что оси 4 толкателей 2 и оси 6 тяг 5
Ручка-съемник работает следующим смещены относительно одна другой на образом. . расстояние 1, происходит выигрыш в
0
6« В этот момент тяги 5, поворачц- ваясь вокруг своих осей 6, вместе с захватами 9 также начинают перемещаться в направлении стрелки М, увлекая за собой блок 21. Так как блок 21 благодаря направляющим 26 может двигаться только поступательно в направлении своей продольной плоскости И, то толкатели вынуждены, опираясь на поверхности. 28 и .преодолевая силы трения, возникающие между ними, двигаться в направлении к продольной плоскости И блока 21, С целью уменьшения сил трения между поверхностями
.
силе оператора при извлечении блока
равный отношению -г-, где L - расстояние между осью 4 толкателя 2 и точкой приложения силы оператором. При такой конструкции ручки-съемника используется свойство рычага второго рода. Вьщвижение блока с выигрышем силы происходит до тех пор, пока линия приложения силы оператором не совпадет с осями 4 толкателей 2 и осями 6 тяг 5. В таком положений тяги 5 также фиксируются подпружинен- ными шариками 7 при взаимодействии их с соответствующими конусообразными углублениями 16, выполненными на полках 3. К этому моменту блок 21 переместится в корпусе на расстояние 1, поэтому необходимо предусмотреть, чтобы расстояние 1 было несколько болый хода расчленения разъема 23. При соблюдении этого условия блок 21 дальше легко извлекается из корпуса при помощи этой не ручки-съемника или вручную. При необходимости ручку- съемник можно также использовать как средство переноса блоков. Для снятия ручки-съемника с блока 2 необходимо тяги 5 с ахватами 9 установить в по- ложенще, Д1ерпендикулярное полкам 3 (в противном случае захваты 9 невоз- можно отклонить в стороны вокруг сво- .их осей, так как хвостовые части захватов 9 в этом случае упираются в края полок 3), затем движением ручки- съемника вниз, преодолевая сопротивление пружины 12 верхнего захвата 9, освободить нижний захват 9 из зацеп-
184
ления со штифтом 24 блока 21 и отвести его в сторону по стрелке К, после чего движением ручки-с4 емника вверх освободить из зацепления со штифтом 24 верхний захват 9. Ручка-съемник с блока снята. Так поступают, когда оператор снимает ручку-съемник одной ручкой, а другая его рука чем-либо занята. Если у оператора свободны обе ручки, то снятие ручки-съемника с блока можно производить следующим образом. Оператор, одновременным нажатием на выстугаа Г7 захватов 9, преодолевая сопротивление пружин 12, выводит захваты 9 из зацепления со штифтами 24 и отводит ручку-съемник в сторону. Ручка-съемник снята.
Формула изобретения
Ручка-съемник для вьщвижения блоков радиоэлектронной аппаратуры, содержащая П-образный корпус с толкателями, тяги, шарнирно размещенные на Kopriyce, и захваты, щарнирно закрепленные на тягах, отличающая- с я т«м, что, с целью упрощения конструкции и улучшения эксплуатационных возможностей, она снабжена подпружиненным фиксатором, размещенным на тягах с возможностью взаимодействия с углублениями, выполненными в полках П-образного корпуса, тяги размещены с возможностью поворота в плоскости, перпевдикулярной плоскости корпуса, захваты выполнены с выступами и подпружинены, а толкатели выполнены в виде роликов с ребордами и закреплены на полках корпуса.
25 П
Lj,,
2 20
Вид б
Фиг.
Фиг. 5
Фи.7
w
e5
В ид Г
К 9
Л
t-vS:
1;
/«
г
м
X.
1±
lil J
Фие.З
д-д
фиг. ft
н А4 t(e.s
фие.го
76 J
фиг.12
. /J
| Устройство для установки и извлечения печатных плат | 1984 |
|
SU1223414A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Устройство для извлечения печатной платы из блока | 1981 |
|
SU1035847A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
