1468724,,
Изобретение относится к машинострое-установки предусмотрена подача рабочего
ПИЮ и может быть использопанг, при от-раствора в контейнер насосом 29 из бака 30
делочно-зачистной и упрочняющей обра-через канал 31 главного вала, сообщаюботке деталей машин и приборов.щегося с каналами ведущей рамы 6
Цель изобретения - интенсификация5 каналом оси 4 контейнера (фиг. 1). процесса обработки путем сообщения полу-Отвод отработанного раствора осуществ- емкостям вращения с переменной ско-ляется в нижнем положении откидной ростью.ветви 8 рамы 6 через каналы оси 4 На фиг. 1 показано устройство дляи отводной канал 32- рамы 6 в прием- центробежной обработки деталей, общийную камеру 33, соединенную трубопрово- вид; на фиг. 2 - вид А на фиг. 1 дом с баком-отстойником 34. (механизм колебательного движения при-Устройство для центробежной обработки вода ведущего катка); на фиг. 3 - раз-деталей работает следующим образом, рез Б-Б на фиг. 2; (узел ведомогоРабочая среда и обрабатываемые дета- зубчатого колеса с осью и ползуном);ли загружаются в контейнер. Включается на фиг. 4 - разрез В-В на фиг. 2 (узел15 Двигатель 19, задающий вращение ведуще- привода ведущего катка); на фиг. 5 -му фрикционному катку 18, движение от привод ведущего катка в положении, прикоторого передается ведомым каткам 16 котором части контейнера имеют одинако-и ,17, жестко связанным с полуемкостя- вые угловые скорости; на фиг. 6 - вид Гми 1 и 2. Полуемкости 1 и 2 вращают- на фиг. 5 (ведущий каток в положении,ся на оси 4 в противоположных на- соответствующем горизонтальному положе-20 правлениях. При встречном движении полу- нию оси контейнера); на фиг. 7 - зуб-емкостей ингредиенты, увлекаемые стенками чатая пара в положении при равной час-контейнера, перемещаются в плоскости, тоте вращения частей контейнера; на фиг. 8-перпендикулярной оси вращения. Затем привод ведущего катка в положении, привключается в работу электродвигатель 15, котором часть контейнера, находящаяся в25 который через редуктор 14 и ременную нижнем положении, имеет максимальноепередачу 12 - 13 приводит во вращатель- значение угловой скорости; на фиг. 9 -ное движение главный вал 9 с рамой 6, зубчатая пара в положении, соответст-в призмах 5 которой установлен контей- вующем максимальному значению частотынер при помощи оси 4. Таким образом, вращения части контейнера, находящейсяконтейнер получает еще одно вращатель- в нижнем положении.30 ное движение относительно оси главного Устройство для центробежной обработ-вала. Такое движение контейнера задает ки деталей содержит контейнер, состоя-загрузке каскадное движение, т. е. части- щий из двух полуемкостей 1 и 2, ус-цы среды поднимаются до определенного тановленных при помощи подшипниковыхположения, затем под действием силы тя- узлов 3 на оси 4 (фиг. 1).жести падают, выполняя полезную работу Ось 4 устанавливают неподвижно в приз-35 по съему микростружки с пбверхности об- мах 5 рамы б, снабженной щарниром 7рабатываемых деталей. Вместе с рамой 6 и откидной ветвью 8. Рама 6 жестковращается эллиптическая щестерня 28, посажена на вал 9, установленный в под-входящая в зацепление с зубчатым коле- щипниках корпуса 10 станины 11. Насом 27. Поскольку шестерня 28 выпол- валу 9 жестко посажен ведомый шкив 12, нена эллиптической, то зубчатое колесо 27, связанный посредством клиновых ремней свращаясь свободно на оси 25, совершает ведущим шкивом 13 привода, состояп еговозвратно-поступательное перемещение с из редуктора 14 и электродвигателя 15.осью 25 и ползуном 26 в пазу пло- Части 1 и 2 контейнера снабжены торо-щадки 21. Возвратно-поступательное движе- выми ведомыми катками 16 и 17, кине-ние оси 25 посредством тяги 23 и шар- матически связанными с ведущим подпру- 5 ниров преобразуется в колебательное дви- жиненным катком 18, установленным при по-жение двигателя 19.
мощи шлицов на валу двигателя 19.При вращении контейнера вместе с ра- Двигатель 19 при помощи цапф 20мой 6 в момент, когда ось 4 находится шарнирно связан с площадкой 21 стани-в горизонтальном положении, двигатель 19 ны 11.занимает такое положение, при котором Корпус двигателя 19 при помощи шар-50 геометрическая ось ведущего катка 18 нира 22, тяги 23 и шарнира 24 соеди-совпадает с осью главного вала 9 (фиг. 5 иен с осью 25, жестко установленной ви 6). При таком положении ведущего кат- ползуне 26, который может перемещатьсяка полуемкости 1 и 2 вращаются в про- в пазу площадки 21 (фиг. 2 и 3).тивоположных направлениях с одинаковой На ось 25 свободно поса жено зубчатое скоростью. При этом зубчатое колесо 27 колесо 27, входящее в зацепление с эл-- находится в зацеплении по наибольшему липтической щестерней 28 (фиг. 1 и 3).диаметру эллиптической шестерни 28, а ось Шестерня 28 неподвижно соединена с25 занимает крайнее верхнее положе- рамой 6 (фиг. 1 и 4). В конструкцииние (фиг. 7).
При дальнейшем вращении рамы 6 с эллиптической шестерней 28 зубчатое колесо 27, вращаясь, перемещается вместе с осью 25 вниз, а тяга 23 поворачивает
кого движения рабочей среды. Это достигается тем, что вместе с возрастанием центробежной силы увеличивается тангенциальная ее составляющая, осуществляюдвигатель 19 относительно оси цапф 20 по щая перемещение частиц вдоль образуючасовой стрелке. В результате такого по-щей контейнера в зону интенсивной обворота двигателя 19, а вместе с ним иработки.
катка 18 происходит изменение частотыВ результате сложного вращательного
вращения контейнера.движения полуемкостей и изменения угЧастота вращения полуемкости, котораяловых скоростей в зависимости от пространственного положения происходит интенпереходит в верхнее положение, уменьшается, а полуемкости, которая переходит в нижнее положение, увеличивается.
При совпадении оси 4 с вертикальной плоскостью верхняя полуемкость имеет максимальное значение угловой скорости, а 15 нижняя полуемкость 2 - соответственно минимальное значение угловой скорости (фиг. 8). В этот момент зубчатое колесо 27 находится 1 в зацеплении по наименьшему диаметру с эллиптической шестерсивный процесс обработки.
Формула изобретения
Устройство для центробежной обработки деталей, содержащее установленную на основании в подшипниковой опоре раму с приводом вращения и контейнер, выполненный в виде полуемкостей, смонтированных
,..,,на раме в подшипниковых опорах с возней 28 (фиг. 9). При дальнейшем пово- 20 можностью вращения в противоположные роте рамы с шестерней 28 зубчатое коле- стороны вокруг оси, перпендикулярной оси со 27, вращаясь, перемещается вместе с вращения рамы, отличающееся тем, что, с осью 25 вверх, поворачивая посредством целью интенсификации процесса обработки, тяги 23 привод против часовой стрелки, привод вращения полуемкостей выполнен происходит выравнивание угловых скоростей 25 в виде двигателя и фрикционной переда- полуемкостей. При горизонтальном положе- чи, состоящей из связанного с двигателем ведущего катка и размещенных на полуемкостях ведомых катков с тороидальным профилем, при этом двигатель соединен с основанием посредством введен- 30 ного в устройство шарнира с возможностью поворота вокруг него от дополнительно введенного в устройство зубчато-рычажного механизма, ведущая шестерня которого жестко закреплена на раме.
8идА
НИИ оси 4 эти скорости равны по величине.
При дальнейшем вращении рамы 6 с контейнером цикл изменения угловых скоростей повторяется.
Увеличение частоты вращения полуемкости, переходящей в нижнее положение, обеспечивает интенсификацию циркуляционкого движения рабочей среды. Это достигается тем, что вместе с возрастанием центробежной силы увеличивается тангенциальная ее составляющая, осуществляю щая перемещение частиц вдоль образуюловых скоростей в зависимости ранственного положения происхо
сивный процесс обработки.
Формула изобретения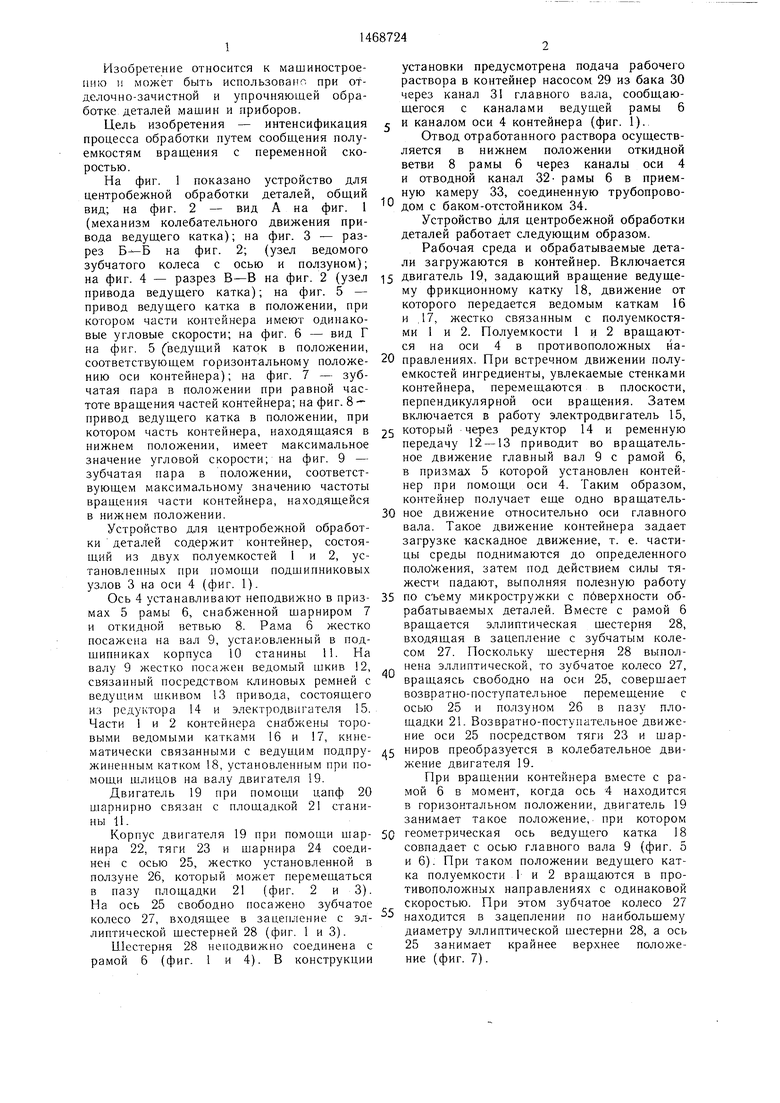

| название | год | авторы | номер документа |
|---|---|---|---|
| Вибрационный механизм вальца дорожного катка с регулировкой вынуждающей силы | 2023 |
|
RU2805708C1 |
| Коробка скоростей | 2016 |
|
RU2610235C1 |
| Двухроторный двухтактный двигатель внутреннего сгорания | 2020 |
|
RU2763245C1 |
| ДИФФЕРЕНЦИАЛ - "ИВАН" | 1998 |
|
RU2135859C1 |
| АВТОМАТИЧЕСКИЙ ВАРИАТОР ФМВ | 1995 |
|
RU2088428C1 |
| СТАНОК-КАЧАЛКА | 2010 |
|
RU2450161C2 |
| ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ С ИЗМЕНЯЕМОЙ СТЕПЕНЬЮ СЖАТИЯ | 2013 |
|
RU2525372C1 |
| Гидромеханическая передача | 1989 |
|
SU1652117A1 |
| Устройство для перемешивания | 1978 |
|
SU931217A1 |
| АВТОМАТИЧЕСКАЯ КОРОБКА ПЕРЕДАЧ ФМВ | 1993 |
|
RU2061600C1 |



Изобретение относится к машиностроению и применяется при отделомно-зачист- ной и упрочняющей обработке деталей машин и приборов. Цель изобретения - интенсификация процесса обработки путем сообщения частям контейнера вращения с переменной скоростью. Рабочий контейнер устройства состоит из двух полуемкостей 1 и 2, которым сообщается вращение в противоположные стороны приводом вращения, выполненным в виде двигателя и фрикционной передачи, состоящей из качающегося ведущего катка 18 и размещенных на полуемкостях ведомых катков с тороидальным профилем. 9 ил. 22 Л .гг/ S (Л 4 Ot 00 ю 
21
27
Т,
га
z
Z6
Фи.5
Вид Г
17
фиг. 6
27
28
(Puz. 7
Фие, 8
27
Фиг. 9
Составитель А. Букатов
Редактор Л. ЛежнинаТехред И. ВересКорректор В. Романонко
Заказ 1225/15Тираж 663Подписное
ВНИИЕ1И Государственного комитета по изобретениям и открытиям нри ГКНТ СССР
113035, Москва, , Раушская наб., д. 4/5 Производственмо-издате.чьский комбинат «Патент, г. Ужгород, у,п. Гагарина, 101
28
| Способ обработки поверхностейдЕТАлЕй | 1979 |
|
SU823087A2 |
| Пишущая машина для тюркско-арабского шрифта | 1922 |
|
SU24A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
