Изобретение относится, к машиностроению, а именно к испытательной технике, и может быть использовано при испытании на усталость по разом- кнутой схеме нагружения передач вращательного движения, например, зубчатых редукторов, агрегатов трансмиссий и т.д.
Цель изобретения - приближение условий испытаний к реальным путем повьшения точности воспроизведения эксплуатахдаонных режимов нарушения и поддержания их в заданном временном интервале.
На чертеже изображена схема стенда.
Стенд содержит привод 1, кинематически соединяемый муфтой 2 с испытуемой передачей 3, к которой муф- той 4 также присоединяется-нагру- жающий вал 5, который .муфтой 6 сое- )ь;инен с нагружателем, состоящим .из (Имеющего торсион 7 тормоза 8. На нагружающем валу 5 закреплен стержень 9 с шарнирами 10, на которых установлены, по меньшей мере, два рычага 11 с грузами 12 в одной плоскости, проходящей через ось нагружающего вала 5, и имеющие возможность пе- ремещения в этой плоскости. Рычаги 11 шарнирно связаны с ползуном 13, установленным на нагружающем валу 5 с возможностью перемещения вдоль его оси. Ползун 13 шарнирно связан при помощи двуплечего рычага 14 со штоком гидроцилиндра 15, подключенного к гидропульсатору 16. Система .управления состоит из последовательн соединенных датчика перемещения, блока согласования и блока управления, при .этом, последний соединен с гидропульсатором 16 и тормозом 8, а датчик перемещений связан со штоком гидроцилиндра 15.
Нагружающей вал 5, стержни 9, рьг чаги 11 с грузами 12, ползун 13 и двуплечий рьиаг 14 совместно с гидроцилиндром 15 и гидропульсатором 16 образуют механизм создания ди- намической (переменной) составляюще нагрузки, постоянная составляющая которой формируется тормозом 8.
Стенд работает следующим образом При работе привод 1 передает Bpa щение тормозу 8 через муфту 2, испытуемую передачу 3, муфту 4, нагружающий вал 5, муфту 6 и торсион-7. Совместно с. нагружающим валом 5 вра
щается стержень 9 с рычагами 11 и грузами 12. Положение грузов 12 определяется положением штока гидро- иялиндра 15. При перемещении штока последнего поворачивается двуплечий рычаг 14, перемещается ползун 13 и поворачиваются вокруг шарниров 10 рычаги 11 с грузами 12. Момент инерции грузов 12 относительно оси вращения нагружающего вала 5 изменяется, при этом возникает импульс вращающего момента, воздействующий на нагружаюш 1й вал 5 и через муфту 4 на вал испытуемой передачи 3. Величина импульса нагружающего момент будет определяться скоростью изменения момента инерции грузов 12:
0 , 5 о
0
Js
5
0
5
М,.
d(Iu)) нагр где - дополнительный нагружающий момент (величина импульса) ;
I - момент инерции грузов 12; (л - частота вращения нагружающего вала 5; t - время.
Величина постоянной составляющей нагружающего момента, а также величина импульса, его формы и частота переменной составляющей нагружающего момента задаются программным устройством в блоке управления.
Положение штока гидроцилиндра 15 контролируется датчиком положения. В случае отклонения штока от заданного положения блоком согласования вьфабатывается сигнал, влияющий на величину постоянной составляющей нагрузки и обеспечивающий возврат штока гидроцилиндра 15 в заданное положение, тем самым поддерживая динамическую нагрузку в выбранном диапазоне и требуемом временном интервале.
Формула изобретения
1. Стенд для динамических испытаний передач, содержащий кинематически соединяемые с испьп-уемой передачей привод и нагружаюший вал, кинематически связанный с последним нагру- жатель, ползун, установленной на нагружающем валу с возможностью перемещения вдоль его оси, шарнирно связанные с ползуном по меньшей мере два рьиага с грузами, установленные в
3 1Д693784
одной плоскости с нагружающим валомроцилиндра связан датчик перемещения и с возможностью поворота в той жесистемы управления, а последняя под- плоскости, и систему управления,ключена также к гидропульсатору и включающую датчик перемещения, от-тормозу,
личающийся тем, что, с2. Стенд по п. 1, о т л и ч а - целью приближения условий испыта нийю щ и и с я тем, что он снабжен к реальным, он снабжен шарнирно свя-включенным в систему управления связанным с ползуном гидроцилиндром изанным с датчиком перемещения блоком соединенным с последним гидропульса- Q согласования и подключенным к послед- тором, нагружатель выполнен в виденему, гидропульсатору и тормозу бло- тормоза с торсионом, с поршнем гид-ком управления.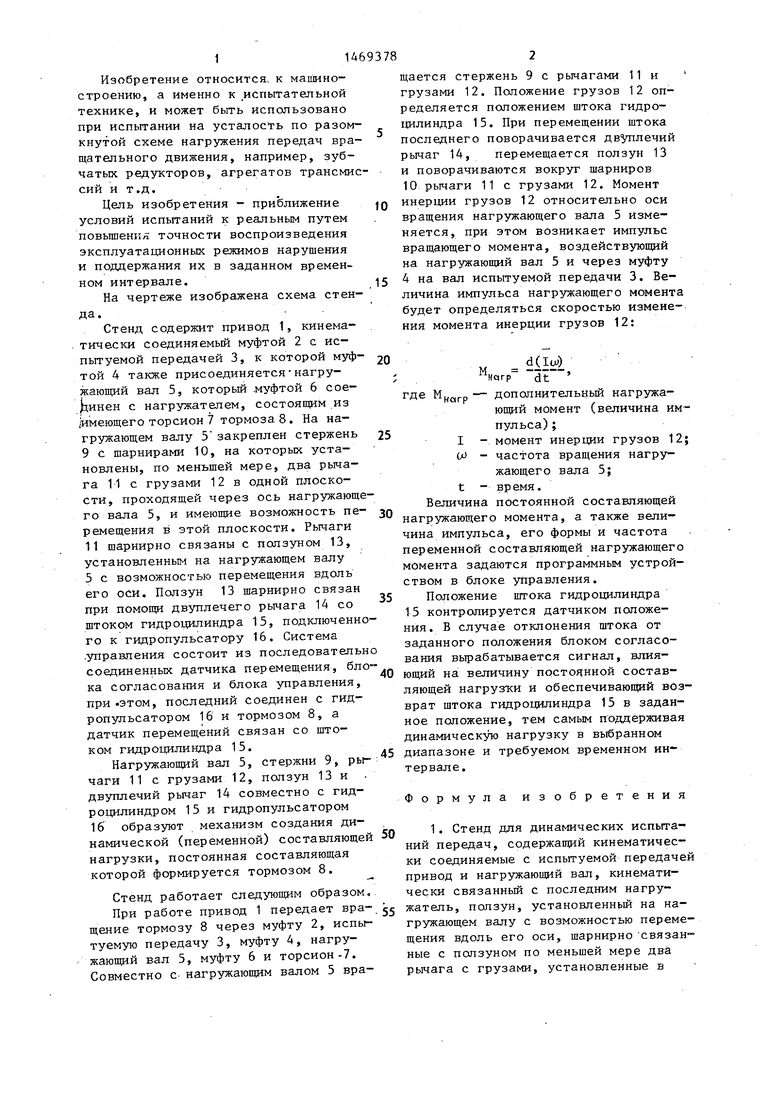
| название | год | авторы | номер документа |
|---|---|---|---|
| Стенд для испытания пневматических шин и упругих элементов подвесок транспортных средств | 2021 |
|
RU2765514C1 |
| Стенд для испытания пневматических шин и упругих элементов подвесок транспортных средств | 2021 |
|
RU2765586C1 |
| Стенд для испытания пневматических шин и упругих элементов подвесок транспортных средств | 2021 |
|
RU2765322C1 |
| Стенд для испытания пневматических шин и упругих элементов подвесок транспортных средств | 2021 |
|
RU2765193C1 |
| Стенд для испытания пневматических шин и упругих элементов подвесок транспортных средств | 2021 |
|
RU2765315C1 |
| Стенд для испытания пневматических шин и упругих элементов подвесок транспортных средств | 2021 |
|
RU2765389C1 |
| Стенд для испытания пневматических шин и упругих элементов подвесок транспортных средств | 2021 |
|
RU2765316C1 |
| Стенд для испытания пневматических шин и упругих элементов подвесок транспортных средств | 2021 |
|
RU2765585C1 |
| Стенд для испытания пневматических шин и упругих элементов подвесок транспортных средств | 2021 |
|
RU2765511C1 |
| Стенд для испытания пневматических шин и упругих элементов подвесок транспортных средств | 2021 |
|
RU2765390C1 |
Изобретение относится к машиностроению, а именно к испытательной технике, и может быть использовано при испытании на усталость по разомкнутой схеме нагружения передач вращательного движения, например, зубчатых редукторов, агрегатов трансмиссий и т.д. Целью изобретения является приближение условий испытаний к реальным путем повьппения точности воспроизведения эксплуатационных режимов нагружения и поддержания их в заданном временном интервале. При работе вращение от привода 1 передается испытуемой передаче 3, нагружающему валу 5 с рычагом 11 и грузами 12, а также тормозу 8. Положение грузов 12 задается штоком гидроцилиндра 15, при перемещении которого изменяется момент инерции грузов 12 относительно оси вращения нагружающего вала 5 и возникает воздействуюощй на последний импульс вращающего момента. Величина импульса, его форйа и частота переменной составляющей, а также величина постоянной составляющей (формируемого тормозом 8) нагружающего момента задается блоком управления. При отклонении штока гидро- цилиндра 15 от заданного положения по сигналу с датчика положения блоком согласования вырабатывается сигнал, обеспечивающий возврат штока в заданное положение. 1 з.п. ф-лы, 1 ил. i . О5 со оз 00 
| Устройство для динамического нагружения агрегатов транспортных средств при испытаниях | 1983 |
|
SU1144018A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Нагружатель | 1985 |
|
SU1280372A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
