(21)4273112/24-10
(22)27.05.87
(46) 30.03.89. Бюл. № 12
(71)Ижевский механический институт
(72)В.Е.Лялин, Р.М.Гараев, А.В.Тарасов и Э.Ф.Мулюков
(53)534.852(088.8)
(56)Авторское свидетельство СССР № 775756, кл. G 11 В 27/10, 1980.
Авторское свидетельство СССР № 1182574, кл. G 11 В 27/10, 1984.
(54)СПОСОБ ИЗМЕРЕНИЯ ПЕРЕКОСА ДВИ- ЖУЩЕГОСЯ ЛЕНТОЧНОГО НОСИТЕЛЯ
(57)Изобретение относится к. измерительной технике, в частности к способам измерения перекоса движущегося электростатического носителя информации, и может быть использовано для определения качества лентопротяжного механизма. Мель изобретения - уменьшение времени измерения. Контрольньш сигнал на носителе нанесен в условном прямоугольнике, большие стороны которого ориентируют параллельно направлению движения носителя, на них наносят электростатический заряд, середину одной из меньших сторон соединяют с концами другой линиями электростатического поля. При сканирования поперек носителя формируют четыре коротких импульса за один цикл сканирования и по формуле
Т
sign (tn- ) arccos --- ,
-..-... .
где о - угол перекоса; д - йремя сканирования луча по кратчайшему расстоянию между большими сторонами прямоугольника; Т, , €,,, 4 временные интервалы между первым и вторым, третьим и четвертым импульсами соответственно, определяют угол перекоса движущегося ленточного носителя. 1 шт.
с «
(Л
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ измерения перекоса движущегося ленточного носителя и устройство для его осуществления | 1984 |
|
SU1182574A1 |
| Способ определения неравномерности скорости движения ленточного носителя информации | 1979 |
|
SU860126A1 |
| Устройство для измерения перекоса ленточного носителя записи | 1987 |
|
SU1522283A1 |
| Устройство для измерения перекоса ленточного носителя | 1984 |
|
SU1278966A1 |
| Устройство для измерения перекоса ленточного носителя записи | 1987 |
|
SU1458890A1 |
| Способ измерения деформации движущегося ленточного носителя информации | 1977 |
|
SU669403A1 |
| Способ измерения продольной деформации движущегося ленточного носителя информации | 1978 |
|
SU720500A1 |
| Способ измерения угла перекоса и неравнополярности скорости движения ленточного носителя | 1984 |
|
SU1187214A1 |
| Устройство для измерения деформации движущегося ленточного носителя | 1984 |
|
SU1185068A1 |
| Способ измерения поперечных колебанийдВижущЕгОСя лЕНТОчНОгО НОСиТЕля | 1979 |
|
SU838309A1 |
1
Изобретение относится к приборостроению, а именно к способам измерения перекоса движущегося ленточного носителя.
Целью изобретения является уменьшение времени измерения.
Сущность способа заключается в следующем.
Время сканирования луча между большими сторонами прямоугольника при отсутствии перекоса постоянно и определяется размерами контрольной сигналограммы и скоростью движения электронного луча. При появлении перекоса происходит увеличение этого 1зр.емени обратно пропорционально косинусу угла перекоса.
Для определения знака угла перекоса используют линии электростатического поля, соединяющие середину ленточного носителя с его ребрами. Время сканирования между первой реберной линией и первой наклонной линией в зависимости от направления перекоса будет больше или меньше времени сканирования между :дторой наклонной линией и второй реберной линией. Поэтому можно дать оценку угла перекоса.
СП
ND
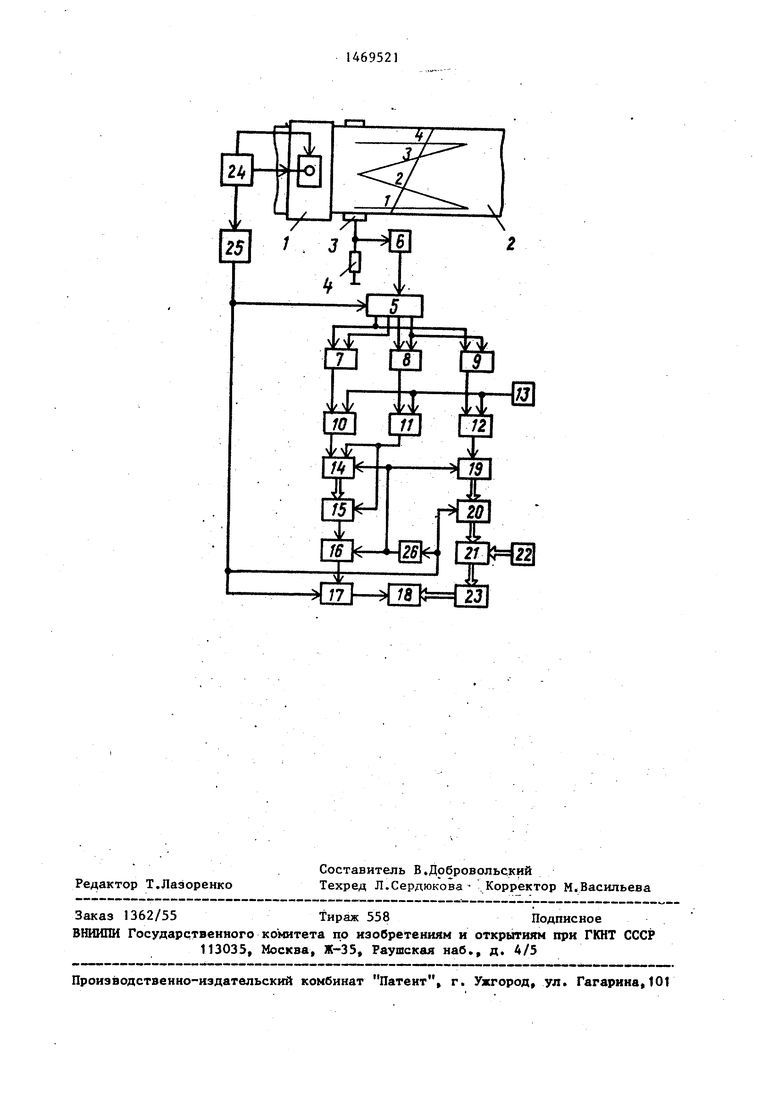
На чертеже представлено устройтво, реализующее способ.
Устройство содержит электронноучевую трубку с металловолойонным с экраном (ЭЛТ с МВЭ) , установленную ерпендикулярно ленточному носителю 2, скользящему по контрэлектроду 3, который заземлен через сопротивление 4 и подключен к первому входу ю распределителя 5 импульсов через усилитель-формирователь 6. Распределитель 5 импульсов имеет четыре выхоа, первые два из которых подключены к первому триггеру 7, а вторые два - 15 к второму триггеру 8, причем первый и четвертый выходы дополнительно нагружены на .ретий триггер 9, Выходы триггеров 7-9 подключены к первым входам элементов И 10-12 соответст- 20 венно, вторые входы кторых подключены к выходу генератора 13
Выходы первого 10 и второго 11 элементов И подключены к входам увеличения и уменьшения соответственно 25 реверсивного счетчика 14, выход которого через .дешифратор. 15 подключен к установочному входу четвертого триггера 16. Вход стробирования дешифратора 15 подключен к выходу вто- 30 рого 11 элемента И.. Выход черверто- го триггера 16 через пятый триггер 17 подключен к первому входу индикатора 18.
Устройство также содержит после- довательно соединенные счетчик 19, вход которого нагружает третий эле - мент И 12, регистр 20, блок 2 деления, второй вход которого подключен к постоянно запоминающему устройству дО (ПЗУ) 22, блок 23 вычисления арккосинуса, выход которого нагружен на второй вход индикатора 18, Для управления работой ЭЛТ с МВЭ 1 служит блок 24 управления, третий выход ко- 45 торого через формирователь 25 п.од- ключен к синхронизирующему входу распределителя 5 импульсов и к вхо- дам занесения пятого триггера 17 и регистра 20, а также через линию за- JQ держки (ЛЗ) 26 к обнуляющим входам счетчиков 14 и 19 и четвертого триггера 16.
Устройство работает следующим образом.55
В исходном состоянии триггеры 7- i 9 и 16 и счетчики 14 и 19 находятся в нулевом состоянии, а распределитель 5 импульсов в исходном состоянии.
Блок 24 управления формирует пилообразное напряжение, управляющее сканированием электронного луча ЭЛТ с МВЭ а также сигнал, управляющий яркостью луча. При движении луча поперек ленточного носителя 2 происходит перено заряда, стекающего по цепи контрэлек- трод.З - резистор 4 - корпус. В момент пересечения лучем контрольной сигналограммы, представляющей собой ломанную линию, на резисторе,4 происходит уменьшение падающего напряжения. После усиления и формирования в усилителе 6 импульсы поступают на распределитель 5 импульсов, работающий так, что каждый очередной импульс проходит на соответствующий выход, номер которого соответствует номеру поступившего импульса. Таким образом, первый импульс установит первьй 7 и второй 8 триггеры в единичное состояние.
При этом открьшаются элементы И 10 и 12 и счетчики 14 и 19 осуществляют подсчет импульсов,.поступающих с генератора 13. По поступлении второго импульса происходит сброс в ноль первого 7 триггера и останов реверсивного счетчика 14. Пр поступлении третьего импульса второй триггер 8 установится в единичное состояние, тем самым открьшая второй элемент И 1. Реверсивный счечик 14 осуществляет вычитание хранившейся там информации. Если счетчик достигнет нулевого состояния, то дешифратор 15 выделит это состояние и пропустит импульс со второго элемента И 11 на свой выход, который установит в единичное состояние четвертый триггер 16.
Поступивший на распределитель 5 импульсов четвертый импульс возвращает в исходное состояние второй 8 и третий 9 триггеры, остановив тем самым работу счетчиков 14 и 19. По окончаний цикла сканирования по команде с блока 24 управления формирователь 25 вырабатывает импульс, кото рьЕЙ устанавливает.в исходное состояние распределитель 5 импульсов, а также через ЛЗ 26 обнуляет счетчики 14 и 19 и триггер 16, подготавливая их для следующего цикла измерения.
Состояние пятого триггера 17 определяет знак перекоса, а регистра 20 - время движения электронного луча между горизонтальными линиями контрольной сигналограммы. В ПЗУ 22 находится код, соответствующий времени сканирования луча при отсутствии перекоса. В блоке 21 деления осуществляется делением этого кода на код, поступивший с регистра 20. Результат деления после функционального преобразования в блоке 23 вы- числения арккосинуса поступает на индикатор 18, куда также поступает информация о знаке перекоса с пятого триггера Г7. Таким образом, на индикаторе отображается абсолютное зна чение угла перекоса с учетом знака за один цикл сканирования.
Формула изобретения
Способ измерения перекоса движущегося ленточного носителя путем записи на неподвижный носитель контрольного сигнала в виде прямой потенциальной линии электростатического поля, выполненной под острым углом к одному ребру ленточного носителя, Воспроизведения контрольного сигнала с движущегося ленточного носителя путем сканирования по ширине носителя лучом электронно: -лучевой трубки с металловолоконным экраном, измерения времени сканирования луча в моменты воспроизведения контрольного сигнала при пересечении лучом потенциальной линии, отличающийся тем,, что, с целью уменьще69521
ния
ю 15
20
25
30
35
бремени измерения, на неподвижный носитель дополнительно записывают контрольные сигналы в виде прямых потенциальных линий электростатического поля, две из которых вьшолнены параллельно ребрам ленточного носителя, а третья выполнена под острым углом к другому ребру ленточного носителя, причем пересечение соответствующих потенциальных линий выбирают в середине между параллельными линиями, а при воспроизведении контрольных сигналов измеряют время сканирования луча между моментами воспроизведения контрольных сигналов, а величину перекоса определяют по формуле
7 D sign ( arccos ,
где о - величина угла перекоса;
временной интервал между первым и вторым моментами воспроизведения контрольных сигналов;
временной интервал между третьим и четвертым моментами воспроизведения контрольных сигналов;
о - временной интервал сканирования перпендикулярно параллельным ребрам носителя потенциальным линиям;
14 временной интервал между
первым и четвертым моментами воспроизведения контрольных сигналов.
.
