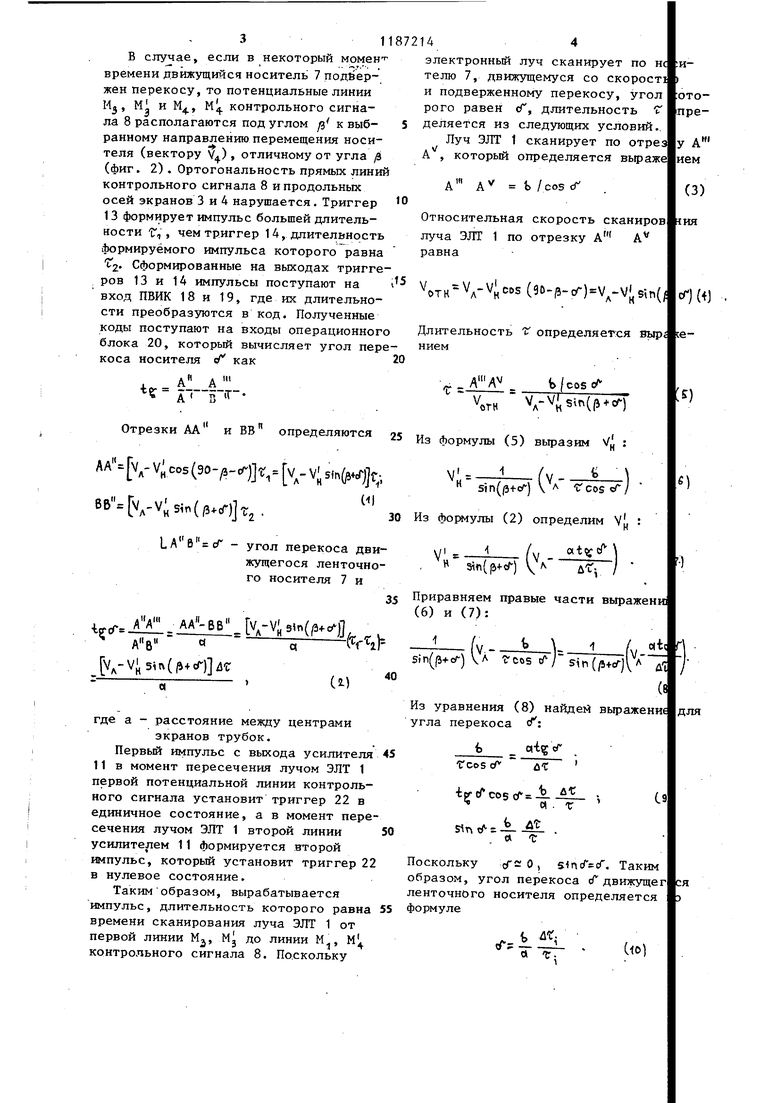
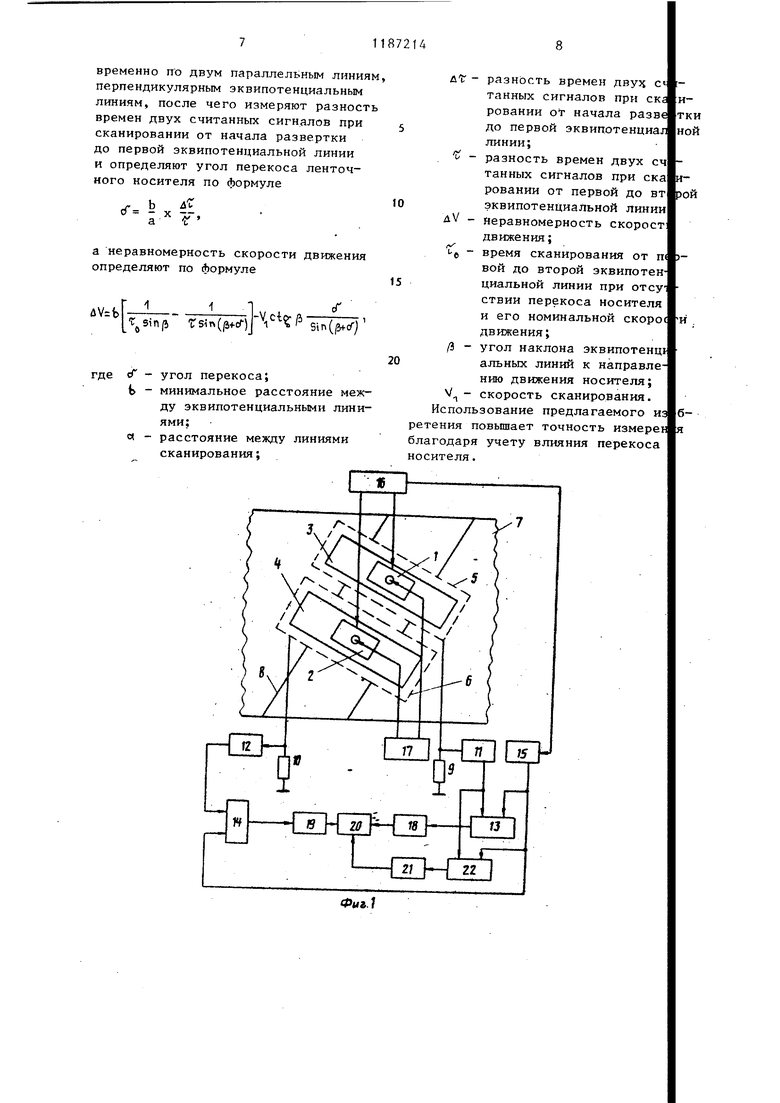
Изобретение относится к области приборостроения, а именно к способа измерения угла перекоса и неравномерности скорости движения ленточного носителя. Цель изобретения - повьппение точ ности измерения и увеличения количества измеряемых параметров движения ленточного носителя. На фиг. 1 изображена блок-схема, устройства, реализующего способ; на фиг. 2 - вид контрольного сигнала, записываемого на носитель, и показа на ориентация продольных осей экранов воспроизводящих трубок относительно последнего; на фиг. 3 временные диаграммы работы устройства, реализующего предлагаемый способ. Электронно-лучевые трубки 1 и 2 (ЭЛТ) с металловолоконными экранами 3 и 4 установлены с некоторым зазором перпендикулярно жесткозакрепленным контрэлектродам 5 и 6, по которым скользит носитель 7. На последний наносится контрольный сиг нал 8 в виде двух параллельных прямых М , М1, , М,, м , потенциальных линий электростатического поля, кот рые располагают под углом 10 f 90 к направлению движения носителя 7. Продольные оси экранов 3 и 4 ПО , и 00 ориентируют перпендикулярно к прямым контрольного сигнала 8: М, М;, М, М,. Соответственно заземленные через резисторы 9 и 10 контрэлектроды 5 и 6 через усилители 11 и 12 соедине ны с нулевым входом триггеров 13 и 14, единичной вход которых через формирователь 15 импульсов связан с первым выходом генератора пилообразного тока 16, второй и третий вы ходы которого подключены к отклоняющим системам ЭЛТ 1 и 2, а их катод соединены с источником 17 высоковольтного напряжения. Выходы тригге ров 13 и 14 через преобразователи J8 и 19 временного интервала в код (ПВИК) связаны с операционным блоком 20, третий вход которого через третий ПВИК 21 связан с выходом триггера 22, нулевой вход которого нагружает формирователь 15, а счетный вход - усилитель 11. Предлягаемый способ осуществляется следующим образом. Сигнал с выхода источника 17 высоковольтного напряжения открывает луч ЭЛТ 1 и 2, а пилообразньй ток, поступающий на отклоняющие системы последних от генератора 16,. управляет сканированием лучей по экранам 3 и 4. Электронные лучи ЭЛТ 1 и 2, попадая на электроды металловолоконных экранов 3 и 4, изменяют потенциалы последних до напряжения пробоя воздушного промежутка: экран ЭЛТ - носитель 7. Результатом пробоя является перенос на носитель 7 электростатического заряда, величина которого прямо пропорционально зависит от разности потенциалов между электродами экрана и участками носителя. В случае, когда луч пересекает контрольный сигнал 8 на носителе 7, величина переносимого заряда меньше, чем когда луч сканирует по электродам экрана, расположенным напротив незаряженньк участков носителя. Перенесенный заряд частично в виде тока стекает по цепи: номитель 7 - контрэлектрод 5(6) - резистор 9(10) - корпус. В момент пересечения лучами ЭЛТ 1 и 2 прямых потенциальных линий контрольного сигнала на резисторах 9 и 10 формируются короткие импульсы, которые далее усиливаются и формируются усилителями 11 и 12 (фиг. Зи, 5 ). В момент начала развертки импульса пилообразного тока, формируемого генератором 16, формирователь 15 импульсов вырабатывает короткий прямоугольный импульс, устанавливающий триггеры 13 и 14 в состояние 1 (фиг. Зв)а триггер 22 всостояние 0. При отсутствии перекоса ленточного носителя (фиг. 2) прямые потенциальные линии М, м,, Mj, М контрольного сигнала 8 расположены перпендикулярно продольным осям экранов 00 и 00 3 и 4. Поэтому лучи ЭЛТ 1 и 2 пересекут первую линию одновременно, при этом на резисторах 9 и 10 сформируются импульсы, которые устанавливают триггеры 13 и 14 в нулевое состояние. На выходе последних вырабатываются импульсы, длительность которых равна времени сканирования луча от начала развертки импульса пилы до потенциальной линии М , м, контрольного сигнала 8 (фиг. За, д). В случае, если в некоторый момен времени движущийся носитель 7 подвержен перекосу, то потенциальные линии Mj , М и М, Mlj. контрольного сигнала 8 располагаются под углом к выбранному направлению перемещения носителя (вектору Vi) , отличному от угла /3 (фиг. 2) . Ортогональность прямых линий контрольного сигнала 8 и продольных осей экранов 3 и 4 нарушается. Триггер 13 формирует импульс большей длительности f, , чем триггер 14, длительность формируемого импульса которого равна t. Сформированные на выходах триггеров 13 и 14 импульсы поступают на вход ПВИК 18 и 19, где их длительности преобразуются в код. Полученные коды поступают на входы операционного блока 20, который вычисляет угол пере коса носителя ff как н . « А : I----T-Отрезки АА и ВВ определяются 25 V; cos( v. v; 5fnO. ,v;sin(,3.r)t2. LA - угол перекоса дви жущегося ленточно го носителя 7 и у..У,-У;,(р..) А в « 5(г) Sindj+erlJ T ;;: W где а - расстояние между центрами экранов трубок. Первый импульс с выхода усилителя 11 в момент пересечения лучом ЭЛТ 1 первой потенциальной линии контрольного сигнала установит триггер 22 в единичное состояние, а в момент пересечения лучом ЭЛТ 1 второй линии усилителем 11 формируется .второй импульс, который установит триггер 22 в нулевое состояние. Такимобразом, вырабатывается импульс, длительность которого равна времени сканирования луча ЭЛТ 1 от первой линии М, Mj до линии М, Mj контрольного сигнала 8. По.скольку 11 Из 30 Из 4 электронный луч сканирует по нсвителю 7, движущемуся со скорост и подверженному перекосу, угол :оторого равен сГ, длительность С пределяется из следующих условий.. Луч ЭЛТ 1 сканирует по отрез у А А , который определяется выраже ием А А b/coscf . (3) Относительная скорость сканироврсия луча ЭЛТ 1 по отрезку А А равна VH (90-p-cr),n{|cr)(4j Длительность определяется вьфжением , . Ь/со5сЛ VH (p.or) формулы (5) вьфазим v/ : v -1-fv--i-) 5in(0tcr) fCOS cT/ фогмулы (2) определим Vl, : yi . H sifl() v приравняем правые части вьфажент (6) и (7): - Jfv--i-V-i fv Sin() VA -J-COS сЛ/ sin(/5+crJ A д1 Из уравнения (8) найдей выражение угла перекоса fc tcr (f 5, Л1 Л t: Поскольку сГ- О , 51псГ сГ. Таким образом, угол перекоса сГ движущег ленточного носителя определяется формуле .., Ь Л. сГ-гГ Длительность импульса с выхода триггера 22 преобразуется в код в ПВИК 21 поступает -на вход операционного блока 20. Когда луч ЭЛТ 2 пересечет вторую линию контрольного сигнала 8, сформированный на резисторе 10 короткий импульс подтвердит нулевое состояние tpиггepa 13. В момент начала формирования генератором 16 второго импульса пилы формирователь 15 импульсов вырабатывает импульс, который устанавливает триггера 13 и 14 в единичное состояние и подтверждает нулевое состояние триггера 22. Вектор V направлен под углом ( к вектору 7 н, направление которог соответствует направлению перемещения носителя 7. Скорость перемещения последнего при наличии перекоса определяется по формуле cos сЛ (. trcuscTl При отсутствии перекоса при fC О заданная наперед скорость дви жения носителя 7 равна l(v -Ho- srr.fi V Ч Неравномерность скорости переме щения носителя определяют как разность текущей и номинальной скорос тей SC / t uV V -V, н ° Sin(/j4.cr)V л f cosc) 5if р IV i Sin fi Sin(|i + c tpSin|) tsin((i Мд Sincf c-t /i (li Sin ((Ь«-сЛ) Поскольку «ГйО, sincfci, то выражение (13) для uV принимает следующий вид: %6infb TSin((i.()J (р Выражая уравнения (10) и (14) в виде алгоритмов вместе с постоянными величинами вводятся в память операционного блока 20, который производит вычисления и индикацию полученных данных. Оценка точности учета влияния перекоса на измерение неравномерности вижения ленточного носителя производится следующим образом. Учитывая, что только с учетом перекоса Tst-jlcoso, ,5in(p.cr), выражение (14) перепишется в виде ((Ь+сЛ о Р .v,.V.e,n(p...l-Vj cos (Л S(n sin(ft+e)-sinftcos . . rM ssn(, Sin(i5(n ( SinjiCOSt -Sinp С05|Ь5 П(У 5in (b Sin (fi + 6) -V slnoT .(is Относительная погрешность измерения скорости движения носителя без учета перекоса определяется как . Согласно способу, измерение угла перекоса и неравномерности скорости движения ленточного носителя осуществляют путем записи на носитель контрольного сигнала в виде двух параллельных прямых эквипотенциальных линий, а затем каждую пару записанных прямых эквипотенциальных линий считывают многократно путем многократного сканирования в направлении, противоположном направлению движения носителя, измеряют разность времен двух считанных сигналов при сканировании от первой до второй эквипотенциальной линии, а запись каждой пары параллельных эквипотенциальньгх линий осуществляют под острым углом к направлению движения носителя, большем 10° и меньшем 90j а их сканирование осуществляют одновременно по двум параллельным линиям перпендикулярным эквипотенциальным линиям, после чего измеряют разность времен двух считанных сигналов при сканировании от начала развертки до первой эквипотенциальной линии и определяют угол перекоса ленточного носителя по формуле
. b л а У .
а неравномерность скорости движения определяют по формуле
Г 1 1
sin(|3.cr;
- угол перекоса;
Ь - минимальное расстояние между эквипотенциальными линиями:
01 - расстояние между линиями сканирования;
At - разность времен двух с
тайных сигналов при скг
ровании от начала раэв
до первой эквицотенциа;
линии;
о - разность времен двух сч1 танных сигналов при ска| ровании от первой до вт| эквипотенциальной линии дУ - неравномерность скорост движения;
время сканирования от п вой до второй эквипотент циальной линии при oTcyJ ствии перекоса носителя и его номинальной скоро( движения; /3 - угол наклона эквипотенц альных линий к направлению движения носителя; V - скорость сканирования, Использование предлагаемого и; ретения повьппает точность измере благодаря учету влияния перекоса носителя.
M2 Мч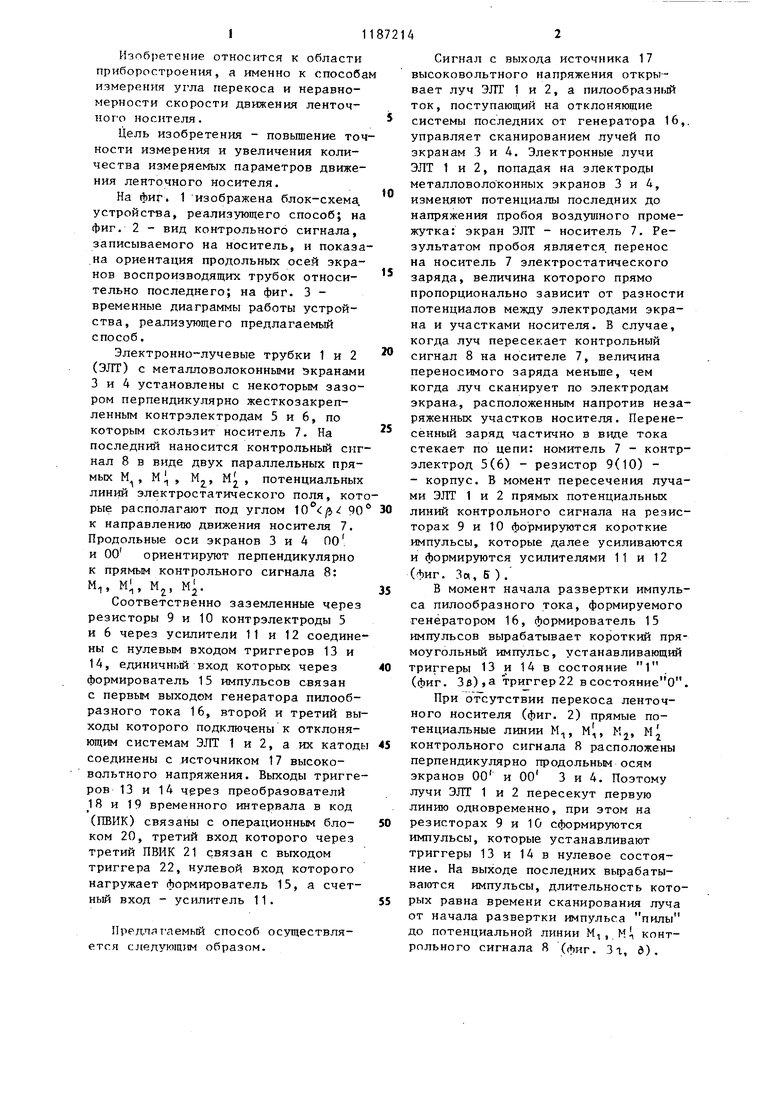

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ измерения перекоса движущегося ленточного носителя и устройство для его осуществления | 1984 |
|
SU1182574A1 |
| Способ определения неравномерности скорости движения ленточного носителя информации | 1979 |
|
SU860126A1 |
| Способ измерения перекоса движущегося ленточного носителя | 1987 |
|
SU1469521A1 |
| Устройство для измерения перекоса ленточного носителя записи | 1987 |
|
SU1458890A1 |
| Способ определения деформаций дви-жущЕгОСя лЕНТОчНОгО НОСиТЕля | 1979 |
|
SU838316A1 |
| Устройство для измерения перекоса ленточного носителя | 1984 |
|
SU1278966A1 |
| Способ определения деформации движущегося ленточного носителя | 1978 |
|
SU767505A1 |
| Способ измерения параметров движения ленточного носителя | 1982 |
|
SU1053157A1 |
| Устройство для определения деформации движущегося ленточного носителя | 1983 |
|
SU1118851A1 |
| Способ определения поперечных колебаний движущегося носителя информации при записи | 1976 |
|
SU699316A1 |
СПОСОБ ИЗМЕРЕНИЯ УГЛА ПЕРЕ КОСА И НЕРАВНОМЕРНОСТИ СКОРОСТИ ДВИ ЖЕНИЯ ЛЕНТОЧНОГО НОСИТЕЛЯ путем зап си на носитель контрольного сигнала в виде двух параллельных прямых эквипотенциальных линий, а затем каждую пару записанных прямых эквипотенциальных линий считывают много кратно путем многократного сканирования в направлении, противоположном направлению движения носителя, измеряют разность времен двух считанных сигналов при сканировании от первой до второй эквипотенциальной линии, и определяют неравномерность скорост движения носителя, отличающийся тем, что, с целью повышения точности измерения и увеличени количества измеряемых параметров дви жения ленточного носителя, запись каждой пары параллельных эквипотенциальных линий осуществляют под острым углом к направлению движения носителя, большем 10 и меньшем 90®, а их сканирование осуществляют одновременно по двум параллельным линиям, перпендикулярным эквипотенциальным линиям, после чего измеряIL, 1187214 11 В 27/10 НИЯ ность времен двух считанных ов при сканировании от начала тки до первой эквипотенциальнии и определяют угол переенточного носителя по формуле| i лГ 5 -f вномерность скорости движения ля определяют.по формуле - угол перекосов; - минимальное расстояние между эквипотенциальными линиями; расстояние между линиями сканирования; разность времен двух считан них сигналов при сканировании от начала развертки до первой эквипотенциальной линии; - разность.времен двух считанных сигналов при сканировании от первой до второй эквипотенциальной линии - неравномерность скорости движения; время сканирования от первой до второй эквипотенциальной линии при отсутствии перекоса носителя и его номинальной скорости движения; угол наклона эквипотенциальны с линий к направлению движения носителя; скорость сканирования.
Фиг.З
| Способ измерения неравномерностиСКОРОСТи дВижЕНия лЕНТОчНОгОНОСиТЕля | 1979 |
|
SU845177A1 |
| Походная разборная печь для варки пищи и печения хлеба | 1920 |
|
SU11A1 |
| Способ измерения неравномерности скорости движения ленточного носителя | 1980 |
|
SU909707A1 |
| Походная разборная печь для варки пищи и печения хлеба | 1920 |
|
SU11A1 |
