Известны цифровые индукционные датчики ноложения, использующие для считывания информации принцин измеиения коэффициента взаимоиндукции двух катушек, имеющих общий незамкнутый магнитопровод ,при изменении воздушного зазора вследствие перемещения замыкающей пластины.
В предлагаемом датчике для повышения его надежности применена компенсационная обмотка, включенная последовательно-встречно с выходной обмоткой таким образом, что при незамкнутом магнитопроводе сигнал на выходе датчика отсутствует. Для введения выходного сигнала датчика в цифровую систему без дополнительных преобразований напряжение возбуждения датчика имеет импульсную форму.
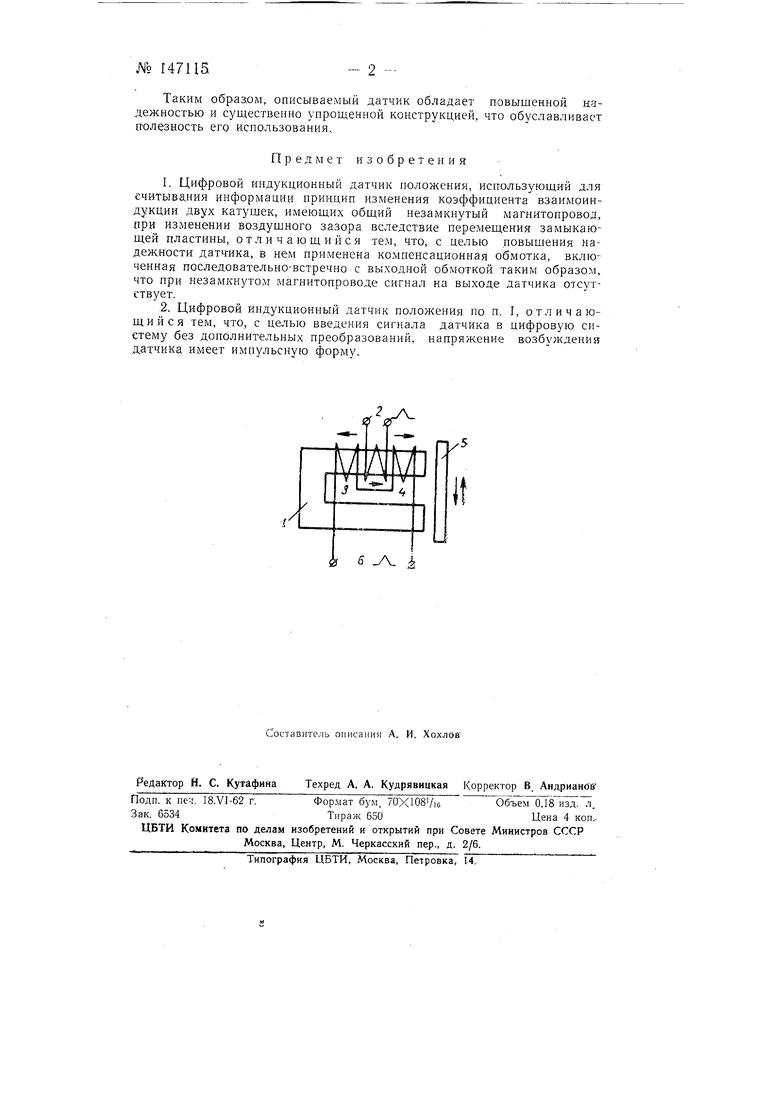
Схема описываемого датчика показана на чертеже.
На П-образном (незамкнутом) магнитопроводе / расположены три катущки 2, 3 и 4- Возбуждающая катушка 2 питается импульсным иапряжением. Катущки 3 и 4 включены последовательно и встречно. Первая из них является выходной, а вторая компенсационной. На связаиную с контролируемым телом пластину 5 из ферромагнитного материала, замыкающую магнитопровод /, наносится в виде вырезов один из двоичных кодов.
Датчик работает следующим образом.
Число витков катушек 5 и 4 выбрано таким образом, что при незамкнутом пластиной 5 магнитопроводе и наличии возбуждения суммарный сигнал на выходе 6 отсутствует, то есть осуществляется полная компенсация помехи. При замыкании магнитопровода пластиной 5 за счет увеличения коэффициента взаимоиндукции между выходной и компенсационной катушками на выходе датчика появляется сигнал. Этот сигнал непосредственно подается в цифровую систему, так как осуществление возбуждения датчика импульсным напряжением не требует промежуточных преобразователей.
Таким образом, описываемый датчик обладает повышенной надежностью и существенно упрощенной конструкцией, что обуславливает полезность его использования.
Предмет изобретения
1. Цифровой индукционный датчик положения, использующий для ечитыва.ния информации принцип изменения коэффициента взаимоиндукции двух катущек, имеющих общий незамкнутый магнитопровод, при изменении воздушного зазора вследствие перемещения замыкающей пластины, отличающийся тем, что, с целью повышения надежности датч-ика, в нем применена компенсационная обмотка, включенная последовательно-встречно с выходной обмоткой таким образом, что при незамкнутом магнитопроводе сигнал на выходе датчика отсутствует.
,2. Цифровой индукционный датчик положения по п. I, отличающийся тем, что, с целью введения сигнала датчика в цифровую систему без дополнительных преобразований, напряжение возбуладения датчика имеет импульсную форму.
| название | год | авторы | номер документа |
|---|---|---|---|
| Индукционный датчик | 1981 |
|
SU1007052A1 |
| ИНДУКТИВНЫЙ УРОВНЕМЕР ЖИДКОМЕТАЛЛИЧЕСКОГО ТЕПЛОНОСИТЕЛЯ | 2013 |
|
RU2558010C2 |
| Магнитоупругий датчик усилий | 1983 |
|
SU1161696A1 |
| Устройство для измерения давления | 1977 |
|
SU702246A1 |
| Устройство для регистрации давления | 1981 |
|
SU994942A1 |
| ДИНАМИЧЕСКИЙ СПОСОБ ИЗМЕРЕНИЯ ВИБРОУСКОРЕНИЯ И ДАТЧИК ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2023 |
|
RU2834759C1 |
| Индукционный датчик | 1979 |
|
SU845233A1 |
| Электромагнитный расходомер | 1990 |
|
SU1768986A1 |
| Преобразователь перемещений длялОгОМЕТРичЕСКОй СХЕМы изМЕРЕНия | 1977 |
|
SU848982A1 |
| ИНДУКТИВНЫЙ УРОВНЕМЕР | 2011 |
|
RU2477456C1 |
i 5 А.
л
